Clear Sky Science · ja
ミニマイクロコントローラを用いた機械学習に基づく物体検知を備えた6自由度ロボットアーム制御の設計と実装
小さな予算で賢くなるロボットアーム
工場のロボットアームが物体を見つけ、掴み方を判断し、滑らかに所定位置へ動く――しかも大型のコンピュータやクラウド接続に頼らないと想像してみてください。本稿はまさにそれを示します。6関節(6自由度)のロボットアームが、小型で低コストのマイクロコントローラ上で視覚と判断を行います。AIがデータセンターの外へ出て日常の機械に組み込まれる様子に興味がある読者にとって、高度なビジョンと制御がUSBメモリほどの大きさのハードウェアで動くことを示す事例です。
ロボットの「脳」を小さくする意義
従来の産業用ロボットは、物体認識や軌道計画に強力な外部コンピュータを必要とすることが多く、これがコストや配線、技術的複雑さを増やします。中小企業にとっては導入の障壁になり得ます。著者らは、単一の安価なマイクロコントローラが、物体を見つけ、3次元空間上で位置を決め、アームの動きを計画し、それを駆動するモータを制御するほとんどの処理を担えることを示そうとしました。処理をオンボードに収めることで、システムはより可搬性が高く、省エネルギーで、狭い場所や変化する環境、例えば小さな工場や教育用ラボでの展開が容易になります。
自らを組み立てる柔軟なアーム
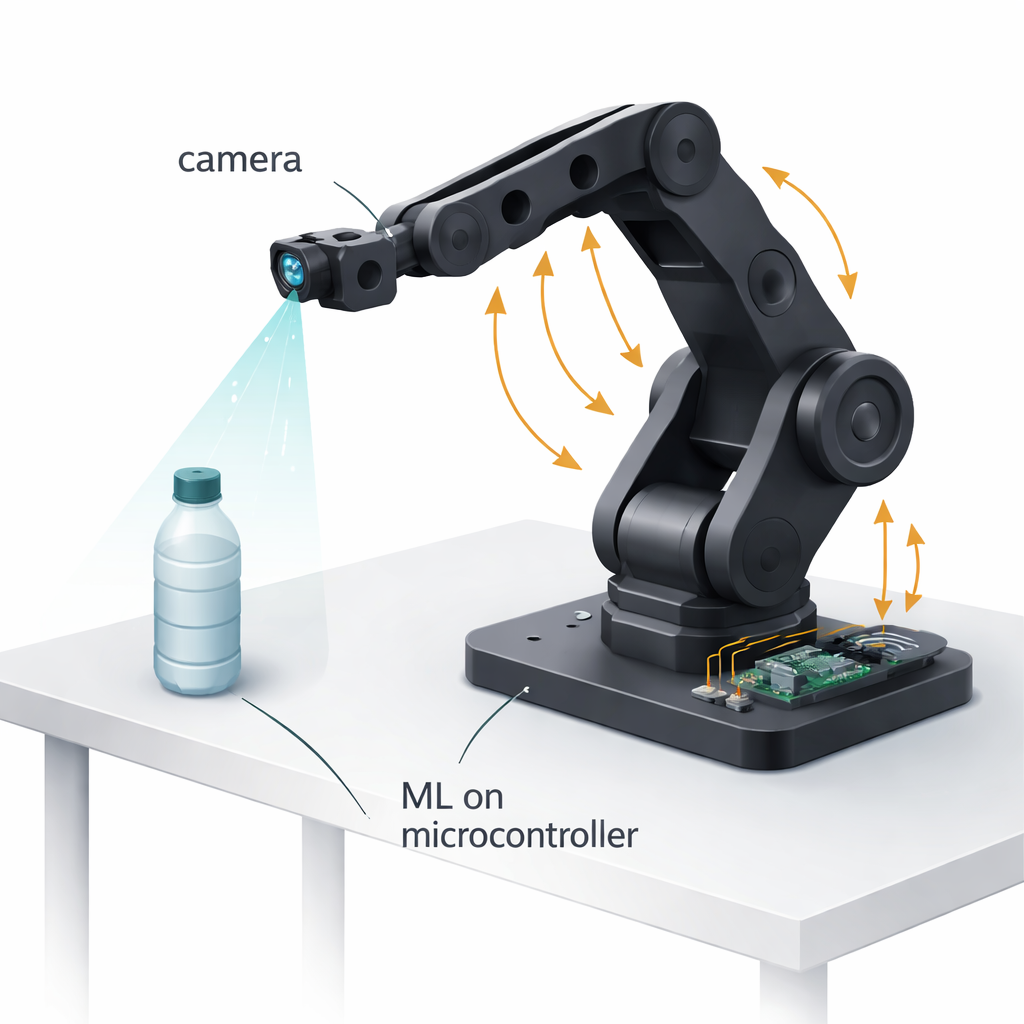
研究チームは軽量で手頃な価格を保つため、主に3Dプリントされたプラスチック部品から6関節のロボットアームをゼロから設計しました。高トルクのホビー用サーボモータが各関節を駆動し、研究者らはこれらのモータを改造して実際の角度をリアルタイムで読み取れるようにし、高精度な閉ループ制御を実現しました。先端のカスタム二指グリッパには簡易な電流センサが組み込まれており、グリッパのモータがどれだけ電流を消費しているかを監視することで把持力を推定し、物を潰したり落としたりしないよう自動で力を調整します。アームの“手首”には小型のフルHDカメラが搭載され、グリッパとともに動くことで、先端から見た第一人称視点で作業領域を観察します。
小さなチップにボトルを見せて教える
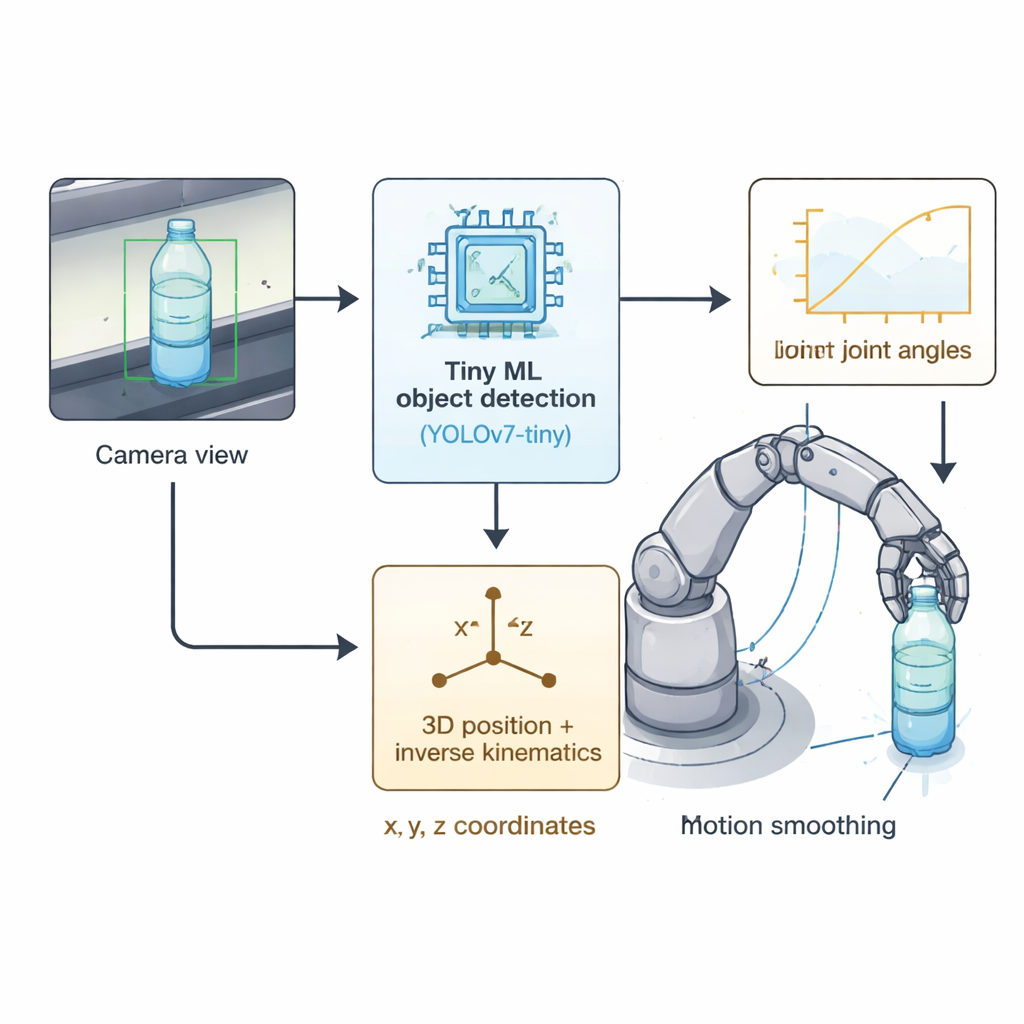
システムの視覚の中心には、人気のある物体検出ネットワークYOLOv7-tinyのコンパクト版があります。研究者らは多様な照明角度、距離、部分的な遮蔽を含む2,500枚以上のペットボトル画像でこのモデルを学習させました。強力なGPUで学習した後、モデルを8ビットの「tiny ML」形式に量子化して、AMB82-Miniマイクロコントローラの限られたメモリと処理能力に収めました。この縮小版でも、およそ88%の精度でボトルを検出し、マイクロコントローラ上でリアルタイムの把持作業に十分な毎秒約7〜8フレームで実行できました。PCやクラウドの助けを必要としません。
ピクセルから精密な動作へ
カメラがボトルを検出すると、システムは検出ボックスの中心を計算し、ピクセル上の見かけの大きさから距離を推定します。これにより空間上のx、y、z座標が得られます。カスタムの数学ソルバがその座標を6つの関節角に変換し、標準的なロボット幾何を用いながらも、非常に小さなプロセッサ上で高速に動くよう最適化されています。制御ソフトは単純な状態機械として整理され、物体の検出、接近、電流センサを触覚として用いたグリッパの閉鎖、そして決められた置き場所へ運搬するというサイクルを回します。動作を滑らかにし振動を避けるため、チームは慎重に形づくられたイージング曲線と、モータのチャタリングやオーバーシュートを抑える特殊な電圧変調法を採用しました。
実環境での試験と示されたこと
繰り返しの実験で、統合システムは最大300グラムのペットボトルを確実に把持・搬送でき、成功率は100%を示しました。500グラムまでのより重い負荷でも良好に動作しました。シミュレーションと計測では位置決め誤差は典型的に約1ミリメートル程度で、多くの選別や包装作業に十分な精度です。より基本的な制御方式と比べて、著者らのモータ制御戦略は振動を低減し、アームが安定するまでの時間を短縮し、ぎくしゃくした動作を排しました。テストは一種類の物体と固定距離、管理された屋内条件に焦点を当てていましたが、本研究は高機能なロボット知覚と制御を非常に小さな組込みボード1枚に収められることの有力な証拠を提供します。
日常的な自動化にとっての意義
非専門家向けの主な結論は、高度な「見る」能力と「動く」能力がもはや高価で高性能なロボットに限定されないということです。小型の機械学習モデル、賢い幾何学的変換、綿密なモータ制御を低コストのマイクロコントローラ上で統合することで、本研究は小規模メーカー、教育機関、ホビイストが現実的に採用できる、コンパクトで自己完結型のロボットアームへの道を示します。将来のバージョンで対応物体や環境の幅が広がれば、同様の組込みシステムが数多くの単純なピック&プレース作業を静かに自動化し、より多くの人々や場で知的ロボティクスが手の届くものになるでしょう。
引用: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
キーワード: 組込みロボティクス, 小型機械学習, ロボットアーム制御, 物体検知, 産業自動化