Clear Sky Science · ja
記述子T-Sファジィ系のためのスーパー・ツイストアルゴリズムに基づくファジィ滑り面制御
複雑なシステムを落ち着かせる
魚群の管理から電力網や電子回路の安定化まで、多くの現実世界のシステムは複雑で非線形な振る舞いを示します。エンジニアは、摂動や不確かさがあってもこれらのシステムを安全かつ効率的に保つために高度な制御アルゴリズムを用います。本論文は、このような手に負えない系をより滑らかに制御し、機器を損なったり性能を低下させたりするような急激な切り替えを回避する新しい制御戦略を紹介します。
なぜ制御が難しいのか
多くの実用システムは、時間変化を記述する微分方程式だけでなく、常時満たされるべき代数的制約によっても支配されています。このような記述子(デスクリプタ)システムは、経済、電力網、機械的リンク機構、そして生物学的モデルなどに現れます。非線形挙動を扱うために、研究者はしばしばTakagi–Sugeno(T-S)ファジィモデルに頼ります。これは複雑な系を、異なる動作領域で成り立つより単純な線形モデルの重ね合わせとして表現します。強力である一方、この枠組みは長らく技術的な障害を抱えてきました:多くの制御手法はファジィの“メンバシップ関数”の時間変化に関する事前の情報を仮定してきましたが、実際にはこれらの変化は系や制御器の将来の不確定な挙動に依存します。
より滑らかなロバスト制御の一形態
スライディングモード制御は、摂動に対しても系を望ましい軌道に素早く導き留めることができることで知られる代表的なロバスト制御手法です。これは制御入力を切り替えることによって不確かさに対抗します。しかし、急激な切り替えは“チャタリング”―高周波の振動を引き起こし、機械系や電気系で望ましくない、あるいは有害な影響を生じさせます。スーパー・ツイストアルゴリズムはスライディングモードのより進んだ形で、切り替えを内部過程に隠すことで連続的な制御信号を生成し、ロバスト性を保ちながらチャタリングを低減します。これまでこの手法は主に単一入力系に制限されるか、多入力系を多数の個別制御器に分解する必要があり、計算面で負担が大きいという問題がありました。
隠れた仮定のない新しい滑り面
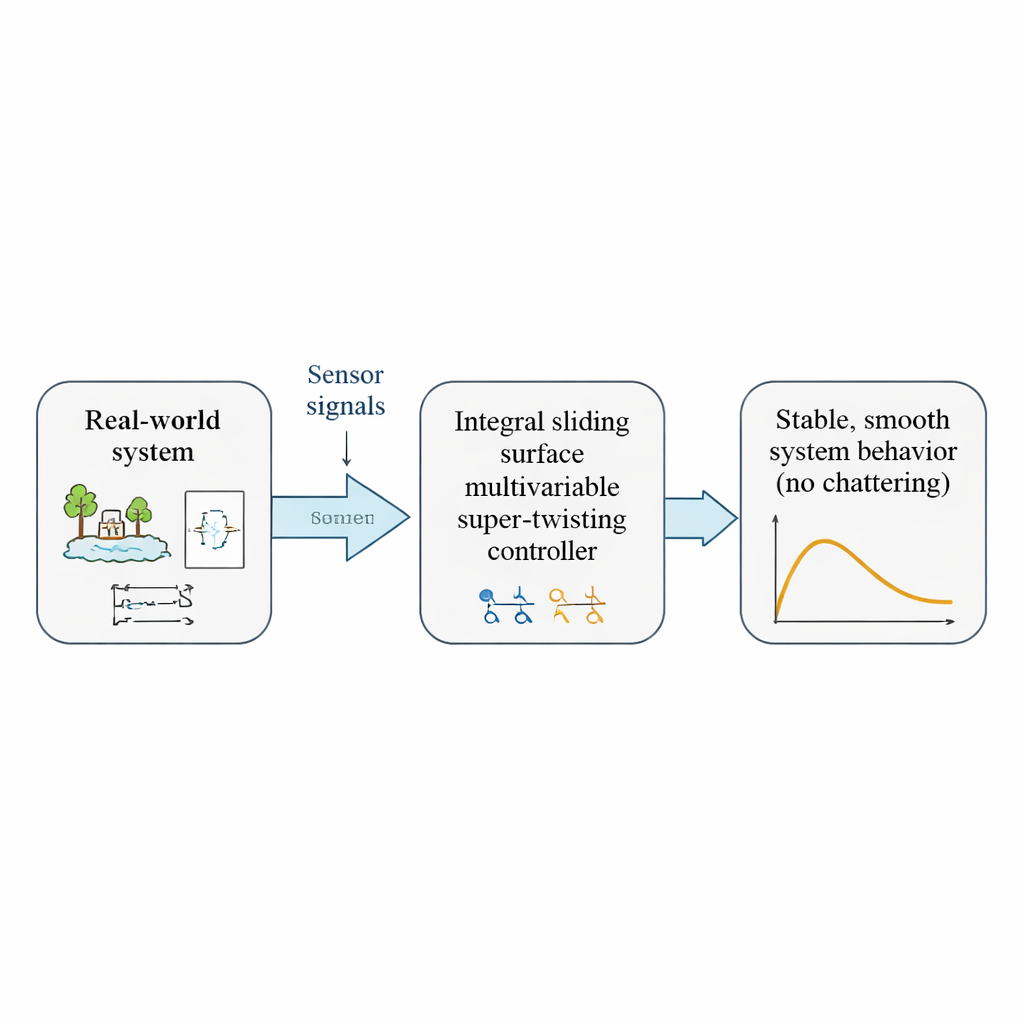
著者らの第一の主要な貢献は、記述子T-Sファジィ系向けに特別に設計された新しい“積分型”滑り面です。簡単に言えば、この滑り面は系の現在の振る舞いと蓄積された過去の挙動の両方を含む数学的条件です。それを巧みに構築することで、著者らは系がこの滑り面上に入れば望ましい挙動が保証されることを示します。しかもファジィのメンバシップ関数の変化に関する事前の上界を必要としません。これは従来の手法を制限していた仮定を取り除くものです。解析では、エネルギー様の関数を慎重に選んで用い、滑り面上での系の挙動が時間とともに安定であることを証明しています。
多変数スーパー・ツイスト制御器
この滑り面を基にして、論文はスーパー・ツイストアルゴリズムの多変数版を展開します。入力ごとや滑り変数ごとに個別の制御器を設計するのではなく、本手法は行列形式でそれらをまとめて扱います。これにより、生態系における相互作用する種や回路内の電流と電圧のように、異なる状態が強く結合している系により適した手法となります。著者らは、系状態が瞬時に滑り面に到達し、その後有限時間で収束するように制御利得を選ぶための条件を導出しています。制御信号が鋭い切り替えではなく連続的であるため、チャタリングは設計上抑制され、同時に摂動に対するロバスト性は維持されます。
生物学と電子回路での立証
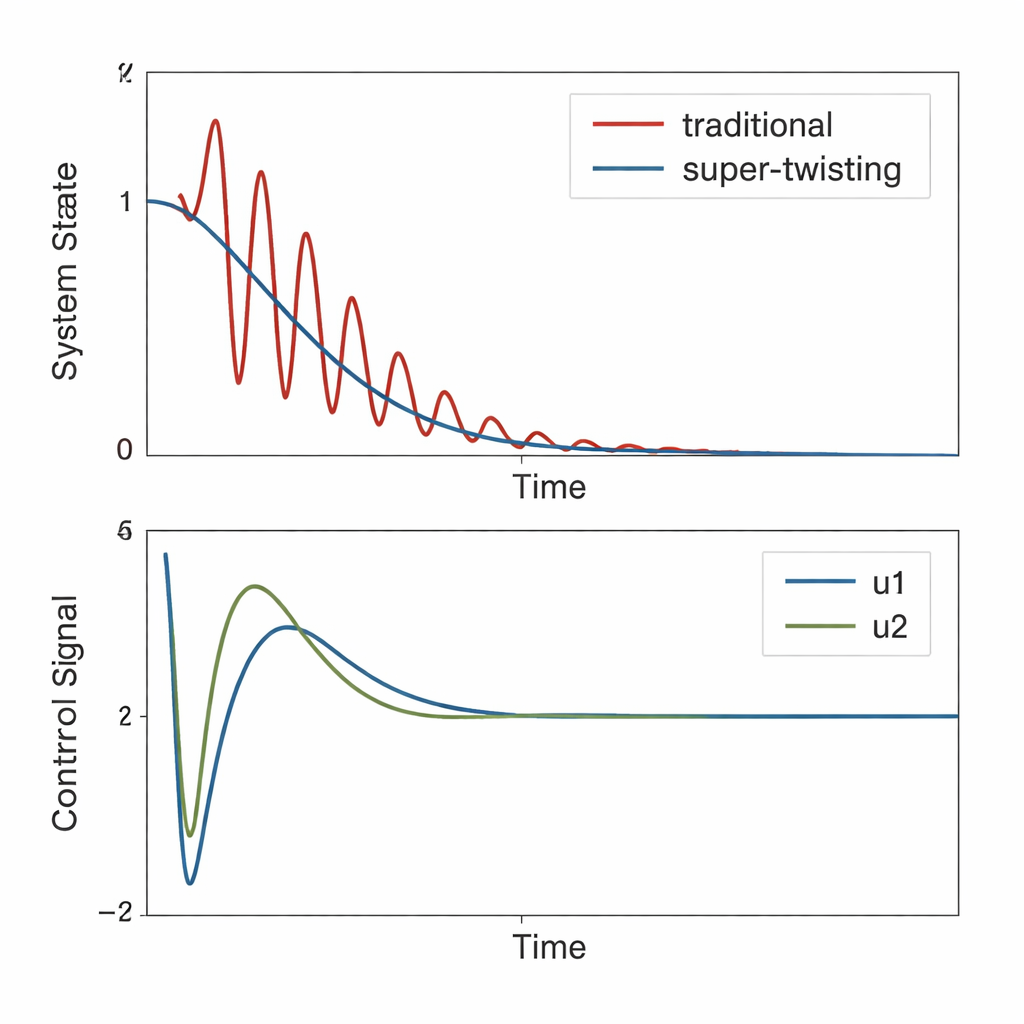
手法の実用性を示すために、著者らは2つの異なる非線形記述子系に適用しています。1つ目は、未成熟個体と成熟個体の個体群、および生殖能力や漁獲・管理行為といった変数を含む生物経済モデルです。2つ目は非線形トンネルダイオード回路で、電子工学における古典的な検証系です。両例ともシミュレーションにより、提案された制御器が系状態を迅速に安定化させ、滑り変数をほぼゼロに保つことで望ましい挙動を精密に追跡していることが示されます。従来のスライディングモード制御器と比べて、系応答と制御信号の双方における振動が大幅に低減されました。
実践的な意義
非専門家向けに要約すると、本研究は複雑で制約のある不確かなシステムを、従来の激しい切り替えを伴わずに制御する手段を提供するということです。ファジィモデリング、積分型滑り面、そして多変数スーパー・ツイストアルゴリズムを組み合わせることで、著者らは数学的に安定性が保証され、かつ実運用上より滑らかな制御器を設計しました。これは生態資源管理から高度な電力エレクトロニクス、ネットワーク化された制御システムに至る応用で有用であり、将来的には通信が攻撃で妨害される可能性のあるサイバーセキュアな環境への拡張も期待されます。
引用: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
キーワード: スライディングモード制御, ファジィシステム, ロバスト制御, 非線形力学, スーパー・ツイストアルゴリズム