Clear Sky Science · ja
3自由度平面マニピュレータのためのロバストなモデル参照型適応制御器
過酷な作業に強い賢いロボットアーム
工場のロボットアームは非常に高速で高精度ですが、実環境が想定外に振る舞うと性能が低下することがあります――荷重が変わる、部品の配置がわずかにずれる、思わぬ外力がアームに加わるなどです。本稿は、一般的な三関節ロボットアームの挙動が正確にモデル化しづらく、かつ強い摂動が存在する状況でも、精度と安定性を保つ新しい手法を検討します。これにより、工場でのロボットの信頼性を高めることを目的としています。
現場で三関節が重要な理由
本研究は三つのリンクが回転ジョイントでつながれ、平面内を動く三リンク平面ロボットに焦点を当てています。一見単純ですが、この構成は多くのピック&プレース作業、包装ライン、組立システムの基礎となっています。課題は一つの関節の動きが他の関節に大きく影響し、腕の運動を記述する方程式が高度に非線形かつ緊密に結合している点です。従来の制御器は全てが既知で予測可能な場合には有効ですが、ペイロードが変化する、摩擦や質量が正確にモデル化されていない、外乱でアームが逸らされるといった状況では性能を発揮しにくくなります。
複雑な運動をより単純な要素に分解
この複雑さを制御するために、著者らはまずリンク質量、関節角度、重力がどのように運動を生み出すかを含む詳細な数理モデルを導出します。次に重要な簡略化として「デカップリング」戦略を導入します。ロボットを絡み合った三関節システムとして扱う代わりに、各関節の加速度は主にその関節のモータトルクと速度に依存するとみなします。残りの効果――関節間相互作用、重力項、その他モデル化が困難な影響など――は不確かさとしてまとめて扱います。このデカップリングにより、制御問題は各関節ごとの三つのより小さなサブシステムに分割でき、現実には内部が複雑であることを認めつつも扱いやすくなります。 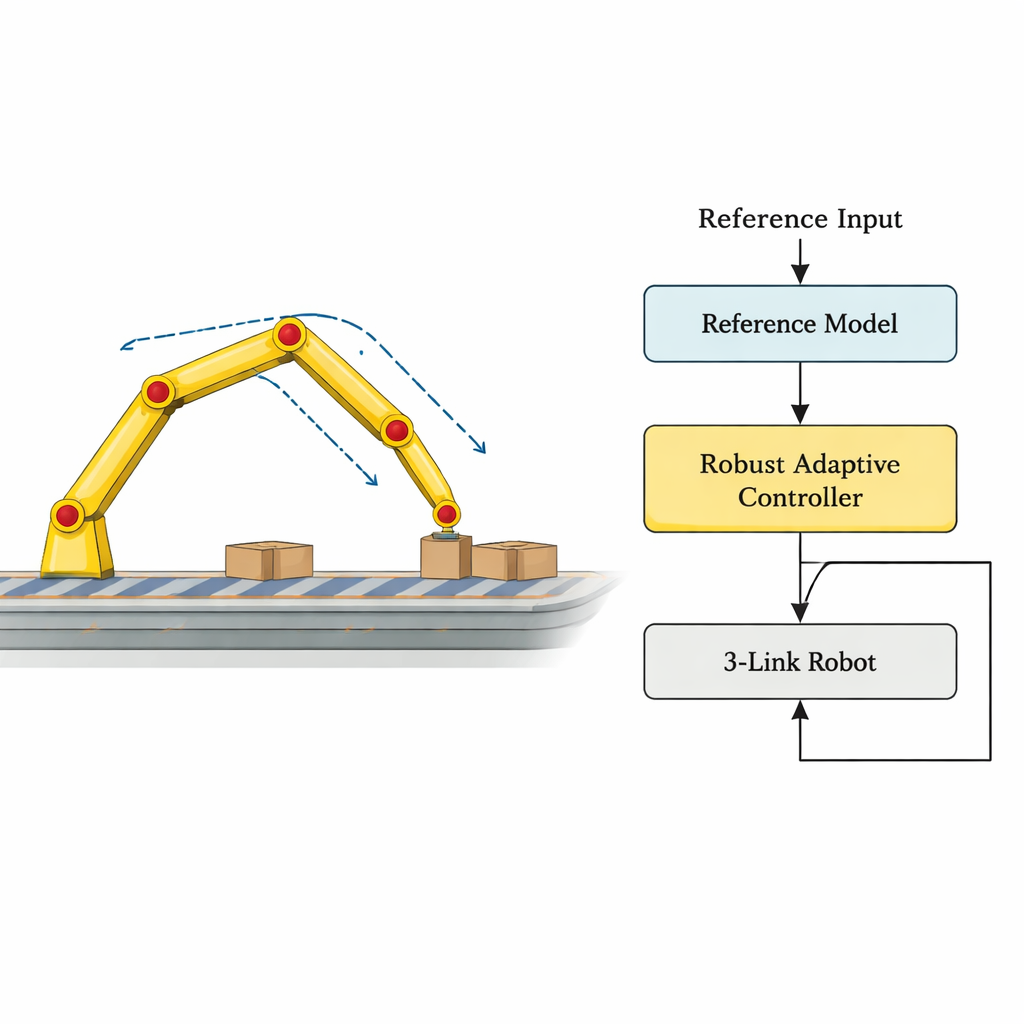
動く目標を追わせる学習
この単純化モデルの上に、著者らはモデル参照型適応制御器(MRAC)を構築します。平たく言えば、まず各関節がコマンドに対して時間的にどのように動くべきかを示す理想応答――参照モデル――を定義します。制御器はロボットの実際の動きとこの理想を継続的に比較し、差を小さくするために内部ゲインをリアルタイムで調整します。理想的な条件下では従来のMRACは参照にかなり忠実に追従させられますが、重大な弱点があります。外乱やモデル誤差が持続する場合、適応ゲインが極端な値へと漂流し、振動、無駄なエネルギー消費、さらには安定性喪失を招く可能性があるのです。この現象はパラメータドリフトと呼ばれ、実運用でのMRAC使用を危険にします。
無謀ではなくロバストな適応を作る
このドリフトを回避するために、本論文は未知の影響を明示的に考慮した複数の「ロバスト」なMRAC変種を提案します。著者らは適応則に追加項を導入し、制御ゲインを安全な範囲へ穏やかに引き戻したり、追従誤差の大きさに基づいて適応の強さをスケーリングしたりします。試験した戦略の中で――シグマ修正、誤差修正、エネルギー認識型最適制御修正として知られる手法――最後の手法が際立ちます。高速振動経路、ピック&プレース動作、質量の50%変化、突発的なペイロード増加、高周波の強い外乱を含む広範な数値シミュレーションを通じて、ロバストMRACは追従誤差を小さく保ち、制御信号を滑らかに維持します。従来のMRACで内部ゲインが無制限に増大するシナリオでも、ロバスト版はゲインを良好に保ち、アームの運動を安定化させます。 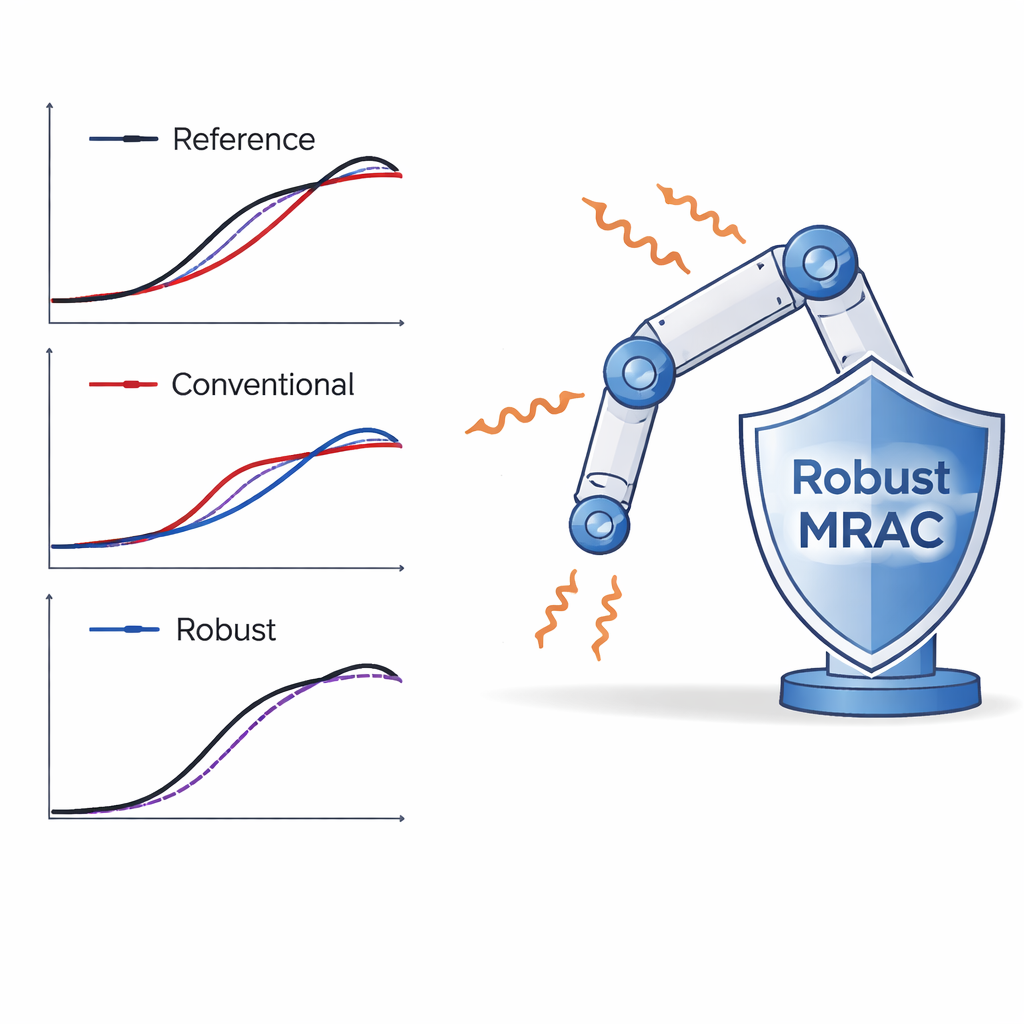
実世界のロボットにとっての意義
一般読者への結論としては、本研究は産業用ロボットアーム向けのより賢い「オートパイロット」を提供するということです――環境やペイロードが変わっても学習と適応を続けつつ、安定性を失わない制御です。複雑な三関節ダイナミクスをより単純な要素に分割し、適応過程に安全装置を加えることで、提案するロバスト適応制御器は外乱や不確かさの下でも適切なモータ努力で望ましい軌道に高精度で追従させます。これにより、実用的なロボティクスは、専門家による頻繁な再調整を必要とせずに迅速に再タスク化でき、予期しない状況に対処し、人間と安全に共存できる真のプラグアンドプレイシステムに一歩近づきます。
引用: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
キーワード: ロボットマニピュレータ制御, 適応制御, 産業用ロボティクス, 軌道追従, ロバスト制御