Clear Sky Science · ja
UAV画像における小物体検出のための改良型YOLOv11n:パラメータ削減で精度向上
上空から微小な対象を見つけることが重要な理由
小型の飛行ロボットは、交通監視や災害対応、荷物配送など、日常の場面に急速に浸透しつつあります。しかし厄介な問題があります。ドローンが数百メートル上空から下を覗くと、人や車、船は数ピクセルに縮小してしまいます。従来のコンピュータビジョンはこうした点状の対象を見逃したり、背景ノイズと混同したりしがちです。本稿は人気の検出体系であるYOLOv11nを小物体検出向けに効率よく調整し、軽量なオンボードコンピュータ上でも動作するように改良した設計を提案します。
ぼやけた小領域でより多くを見出す
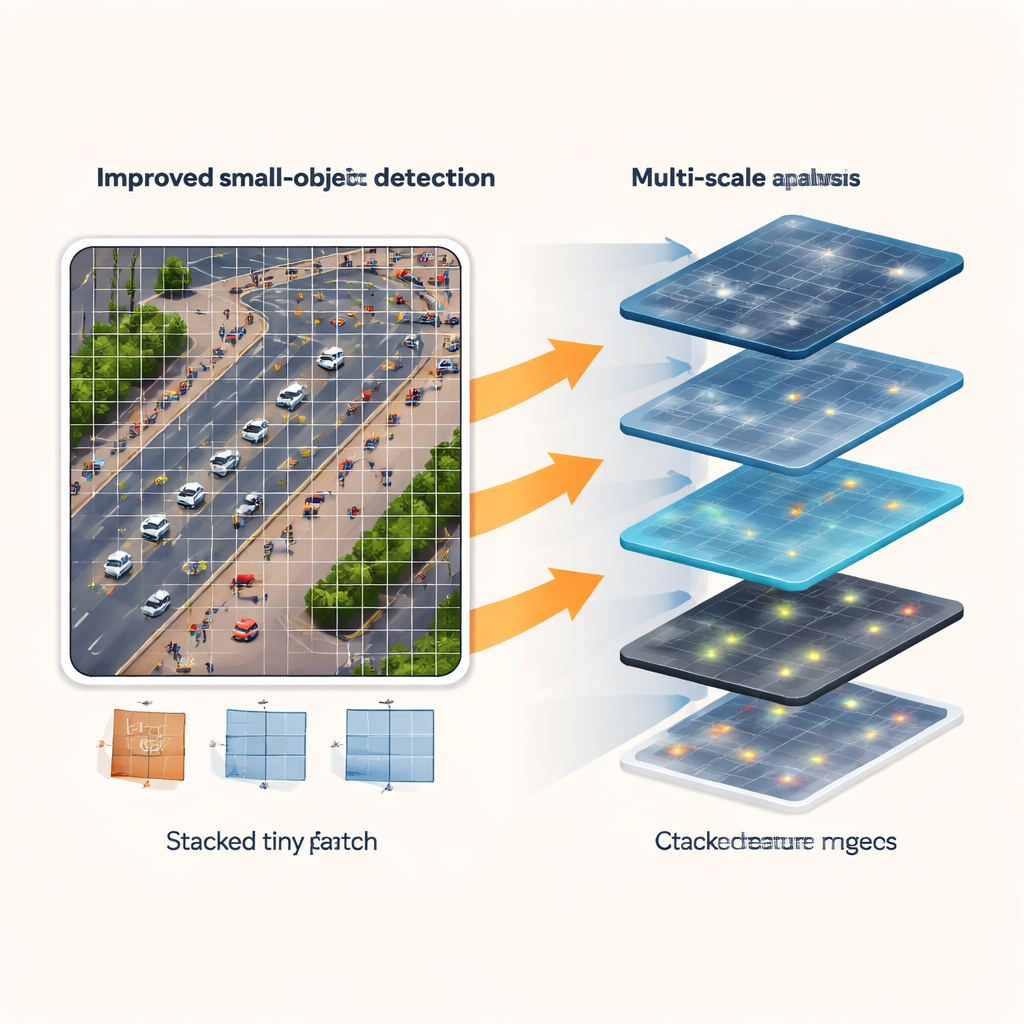
ドローン画像はアルゴリズムにとって過酷な環境です。対象の多くは32×32ピクセル未満、さらに16ピクセル以下というケースも多くあります。動きや振動、照度変化、かすみ、雑然とした都市背景がそれらの小さなターゲットを識別しづらくします。加えてドローンは処理能力や電力が限られるため、重いモデルは現実的ではありません。著者らはコンパクトなリアルタイム検出器であるYOLOv11nを出発点に、モデルを膨らませずに小さくコントラストの低い領域からより有用な情報を引き出すよう内部を再設計しました。目的は明快かつ厳しいものです:学習可能なパラメータを同等または削減したまま、小物体の検出精度を大幅に向上させ、エッジ機器で許容できる速度を保つこと。
多尺度で場面から学ぶ
最初の改良はネットワークの「視点」に着目しています。単一の固定サイズウィンドウで見る代わりに、新しいMultiscale Edge-Feature Adaptive Selection(MSEAF)モジュールは複数のスケールで同時に画像を観察します。粗いビューは道路や建物、群衆といった広い配置を捉え、細かいビューは個々の車や人を追跡します。エッジ強調の工程は、人間には見えやすい境界や形状を強調し、微小領域で失われがちな情報を回復します。さらにスマートな融合機構が最も情報量の多い領域を増幅し、背景ノイズを抑えます。この多尺度・エッジ認識表現により、ネットワークの後続部は発見が難しい対象を探すためのより豊かな初期入力を得られます。
パイプラインを通じて小物体を失わない
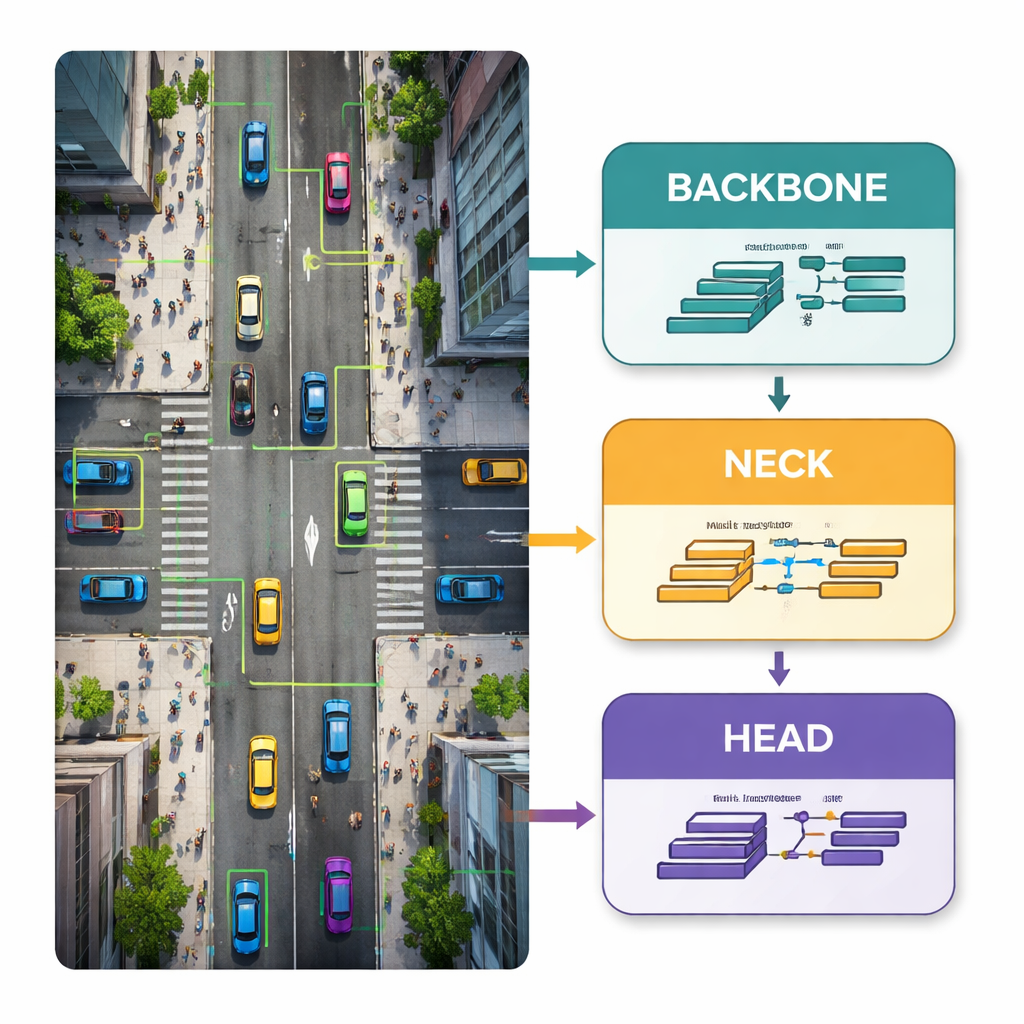
従来のYOLOネットワークは、入力から出力へと情報が流れる過程で特徴マップを繰り返し縮小します。大きな対象には問題ありませんが、微小物体には致命的です。数回のダウンサンプリングの後、内部マップ上で歩行者が1〜2ピクセルしか占めないか、完全に消えてしまうことがあります。これを防ぐために、著者らはネットワークの中間にある“ネック”部分を再構成し、より高解像度の特徴を扱う新しいP2検出ヘッドを追加しました。ScalCatとScal3DCというカスタムモジュールは、浅い層の細部情報と深い層の文脈情報を慎重に組み合わせ、両者が互いに補強し合うようにします。その結果、小さな車や人を複数スケールにわたって追跡でき、速度のために犠牲にしない検出器が実現します。
パラメータを減らしてより鋭い判定を
最後の段階は予測部(検出ヘッド)の合理化です。元の設計では、多数のチャンネルを持つ深い層が主に大きな物体向けに割かれていましたが、ドローン視点では大きな対象は比較的まれです。新しいShared Re-parameterized Detection(SRepD)ヘッドはスケール間でチャンネル数を均一化し、学習時にいくつかの専門的な畳み込みブランチが特徴の強調方法を探索する賢い訓練トリックを使います。推論時にはこれらのブランチを数学的に単一の畳み込みに統合します。この共有された再パラメータ化設計により、特徴融合が改善される一方でパラメータ数は実際に削減され、エッジデバイスでの計算負荷も管理可能に保たれます。
実世界のテストで示された数値
改良モデルは3つの公開データセットで評価されました:VisDrone2019(都市景観の混在)、TinyPerson(陸海上の極めて小さな人)、HazyDet(ドローン視点の濃いかすみ中の車両)。VisDrone2019では、改良設計は主要な精度指標(mAP50)と適合率を元のYOLOv11nと比べて4.6ポイント向上させ、パラメータ数を約8.5%削減しました。TinyPersonでは改善幅がさらに大きく、mAP50で約5.9ポイント、適合率で5.6ポイントの向上と同程度のパラメータ削減を示し、コンパクトな本モデルは4倍のパラメータを持つより大きなYOLOv11sを上回りました。かすみの強い条件でも、アップグレード版は精度とロバストネスの面でベースラインを超え、低電力のHuawei Atlas 200 DKエッジボード上でリアルタイム速度を維持しました。
日常のドローン利用にとっての意義
非専門家向けの主要な結論は、この研究がドローンをより鋭い視覚と効率的な資源運用の両方に向かわせる可能性を示していることです。ネットワークがどこでどのように詳細を探すかを見直し、微小ターゲットのために高解像度情報を保持し、予測機構を簡素化することで、著者らは精度とモデルサイズの通常のトレードオフを打ち破りました。結果として得られたシステムは、混雑やかすみ、複雑な背景の中でも遠方の小さな人や車両を大きなハードウェアを必要とせずに検出する能力が向上しています。この種の進展は、交通安全、捜索救助、環境監視といったリアルタイムの航空監視が日常的に導入される可能性を高めます。
引用: Zhu, H., Xie, X. Enhanced YOLOv11n for small object detection in UAV imagery: higher accuracy with fewer parameters. Sci Rep 16, 5536 (2026). https://doi.org/10.1038/s41598-026-35301-2
キーワード: ドローン物体検出, 小物体認識, YOLOニューラルネットワーク, 航空画像解析, UAV向けエッジAI