Clear Sky Science · ja
飛行アドホックネットワークにおける知能的で生物に着想を得た多目的かつスケーラブルなUAV支援クラスタリングアルゴリズム
空のスマートなドローンスウォーム
地震後の生存者捜索、山火事の監視、農作物の見回りなどのために協調して働くドローンの隊列を想像してください。そのためには、何百もの飛行ロボットがバッテリーを消耗させずに素早く互いに通信する必要があります。本論文は、こうした「ドローンスウォーム」をどのように編成すれば接続を維持し、迅速に反応し、滞空時間を延ばせるかを検討します。その着想は意外な場所、すなわちセキレタリーバード(ウチワショウビン)の狩り行動にあります。
飛行ネットワークが扱いにくい理由
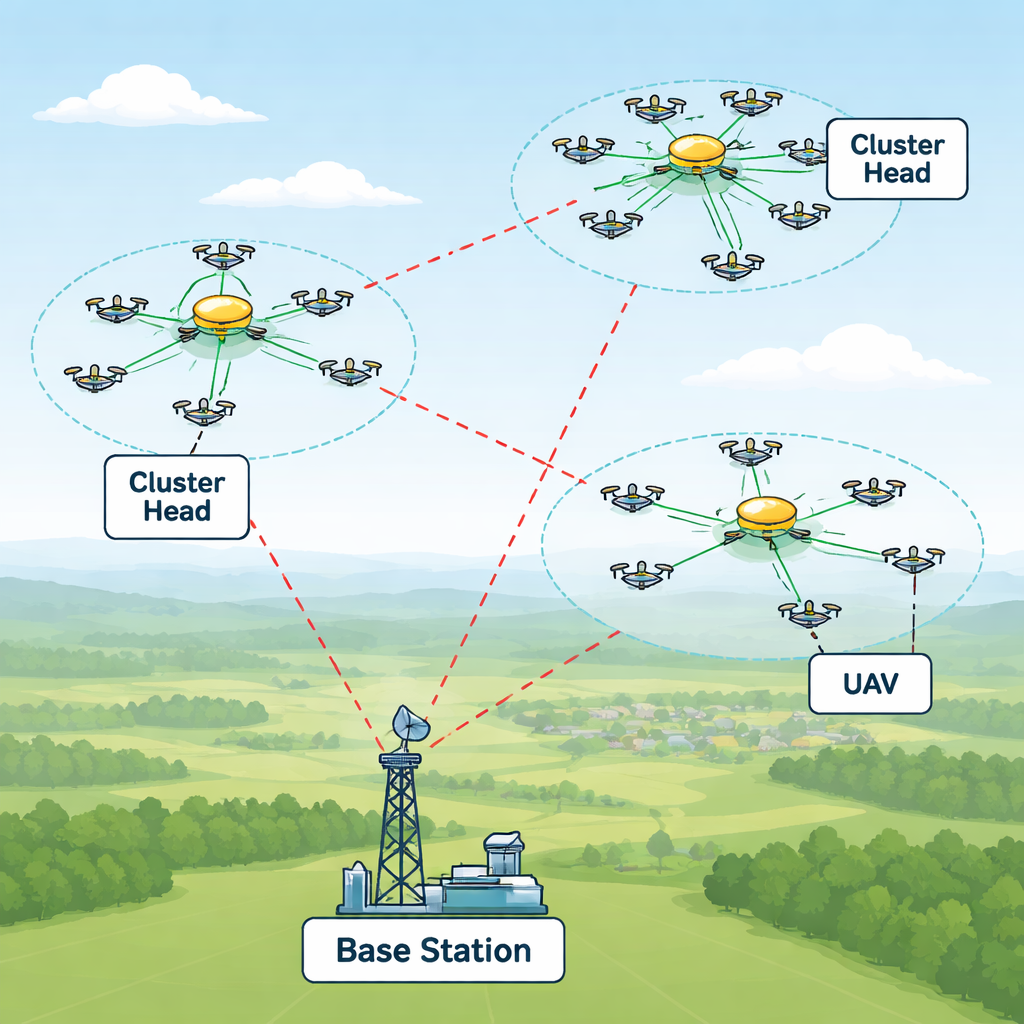
現代のドローンは、エンジニアが飛行アドホックネットワーク(FANET)と呼ぶ、空中にのみ存在する無線の網を形成できます。地上ネットワークとは異なり、これらのドローンは三次元空間を移動し、素早く方向を変え、限られたバッテリーで動作します。もしすべてのドローンが互いに直接通信しようとすると、信号の衝突や遅延が増え、バッテリーが急速に消耗します。一般的な解決策はクラスタを形成することで、各クラスタは“クラスタヘッド”と呼ばれるリーダーが率いてローカルなメッセージを調整し、他のクラスタヘッドと通信します。しかし、どのドローンをリーダーに選ぶべきか、スウォームが移動するにつれていつその役割を入れ替えるべきかは、常に変化するパズルです。
捕食鳥から借りた手法
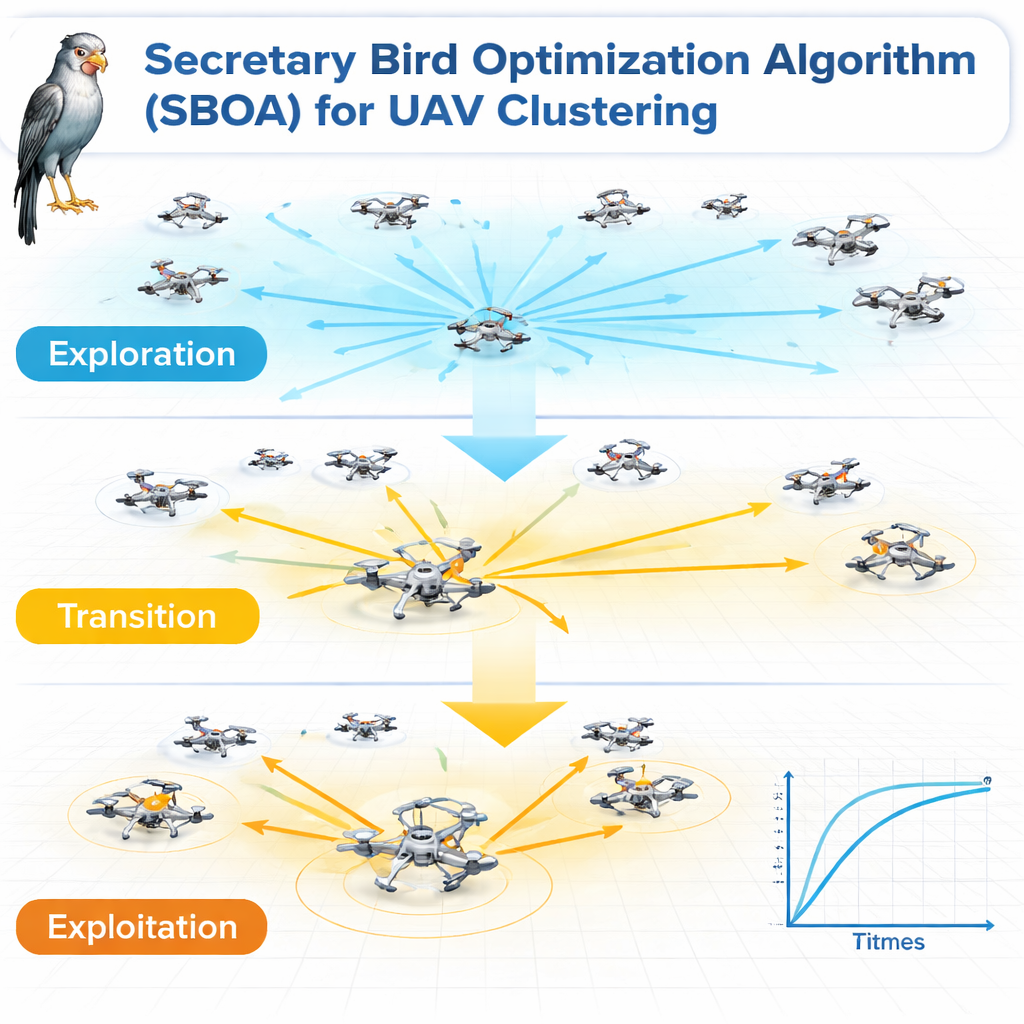
著者らはセキレタリーバード最適化アルゴリズム(SBOA)と呼ばれる生物由来のアイデアに着目しました。セキレタリーバードは広範囲を見渡してから接近し、正確な蹴りで獲物を仕留めることで知られています。SBOAはこのパターンをソフトウェアで模倣します。まずドローンスウォーム全体に渡ってクラスタヘッドを割り当てる多くの可能性を探索し、徐々により有望な選択肢に絞り込みます。各段階で三つの問いを投げかけます:各クラスタ内のドローンは互いに十分近いか?選ばれたリーダーはまだ十分なバッテリーを持っているか?そして負荷は公平に分配され、あるリーダーだけが過負荷になっていないか?この問題を多目的問題として扱うことで、距離、エネルギー、公平性を同時にバランスさせます。
仮想世界でのドローンスウォームの試験
この鳥に着想を得た戦略が有効かどうかを確かめるため、研究チームは詳細なコンピュータシミュレーションを構築しました。30機から160機のドローンを、1平方キロメートルから15×15キロメートルの広大なボックスまでのさまざまなサイズの3D仮想空間に投入し、単純な移動モデルで飛行させました。通信範囲は100〜900メートルに変化させました。各シナリオでSBOAは、自然の振る舞いを模倣した三つの高度な代替手法(Fire Hawk Optimization:FHOA、Portia Spider Optimization:PSOA、および精子受精に基づく多目的手法:MOSFP)と競いました。研究者たちは形成されたクラスタ数、安定した構造が現れる速さ、リーダー業務の分配の均等さ、そして距離・エネルギー使用・バランスを単一のスコアにまとめた“フィットネス”を追跡しました。
シミュレーションが示したこと
ほとんどすべてのテストで、SBOAが優れた結果を示しました。競合手法に比べて最大で15%高いフィットネスを定期的に達成し、クラスタリングの効率は約10%向上、リーダー間の負荷バランスは約40%改善されました。時間経過に基づく実験では、セキレタリーバード方式は特にドローン数が増えた場合に、より少ないシミュレーションフレームで安定したクラスタパターンに到達しました。ドローンが離れて配置されるまばらで大きな3D領域でも、SBOAは最良の達成可能なフィットネスの85%以上を維持し、密なスウォームにも分散した編成にも適応できることを示しました。サーフェスプロット、t-SNEマップ、バイオリンプロットなどの可視化ツールは、SBOAが他手法よりもリーダーの負荷変動が小さく、より締まった明確なクラスタを生成したことを裏付けました。
シミュレーションから実際のミッションへ
本研究は、セキレタリーバードに着想を得た戦略がドローンスウォームの管理に有効であると結論づけています:ドローンを効率的にグループ化し、リーダー間で仕事を公平に分配し、状況の変化に滑らかに反応します。一般読者にとっては、将来の救助・農業・監視用途のドローン隊列は、単に自己組織化を改善することで、より長く接続を維持し、バッテリーを節約し、より信頼性高く応答できるようになることを意味します。著者らは、突風、GPS誤差、無線干渉など実世界の要因は引き続き検証が必要であり、次のステップとして学習に基づく運動予測やより賢いルーティングの導入を提案しています。しかし堅牢な空中ネットワークへの一歩として、SBOAはサバンナでの自然の狩り方を観察することが、空のロボット助手をより有能にする助けになることを示しています。
引用: Aslam, Z., Rahman, T., Husnain, G. et al. An intelligent bio-inspired multi-objective and scalable UAV-assisted clustering algorithm in flying ad hoc networks. Sci Rep 16, 4870 (2026). https://doi.org/10.1038/s41598-026-35196-z
キーワード: ドローンスウォーム, 無線通信, 生物由来アルゴリズム, 省エネルギー型ネットワーキング, 飛行アドホックネットワーク