Clear Sky Science · ja
自動運転システムにおける知覚のためのマルチモーダル学習とシミュレーションアプローチ
より賢い自動運転車
自動運転車は道路の安全性向上や渋滞緩和を約束しますが、それは周囲の世界を本当に理解できてこそ実現します。本稿は、自動車が慎重な人間のドライバーのように「見て」「感じて」「予測する」能力を高める新しい手法を探ります。具体的には複数のセンサーを融合し、実世界の仮想コピーで安全に検証し、車の判断を人間にとってより透明にすることを組み合わせます。
多様な「感覚」で道路を捉える
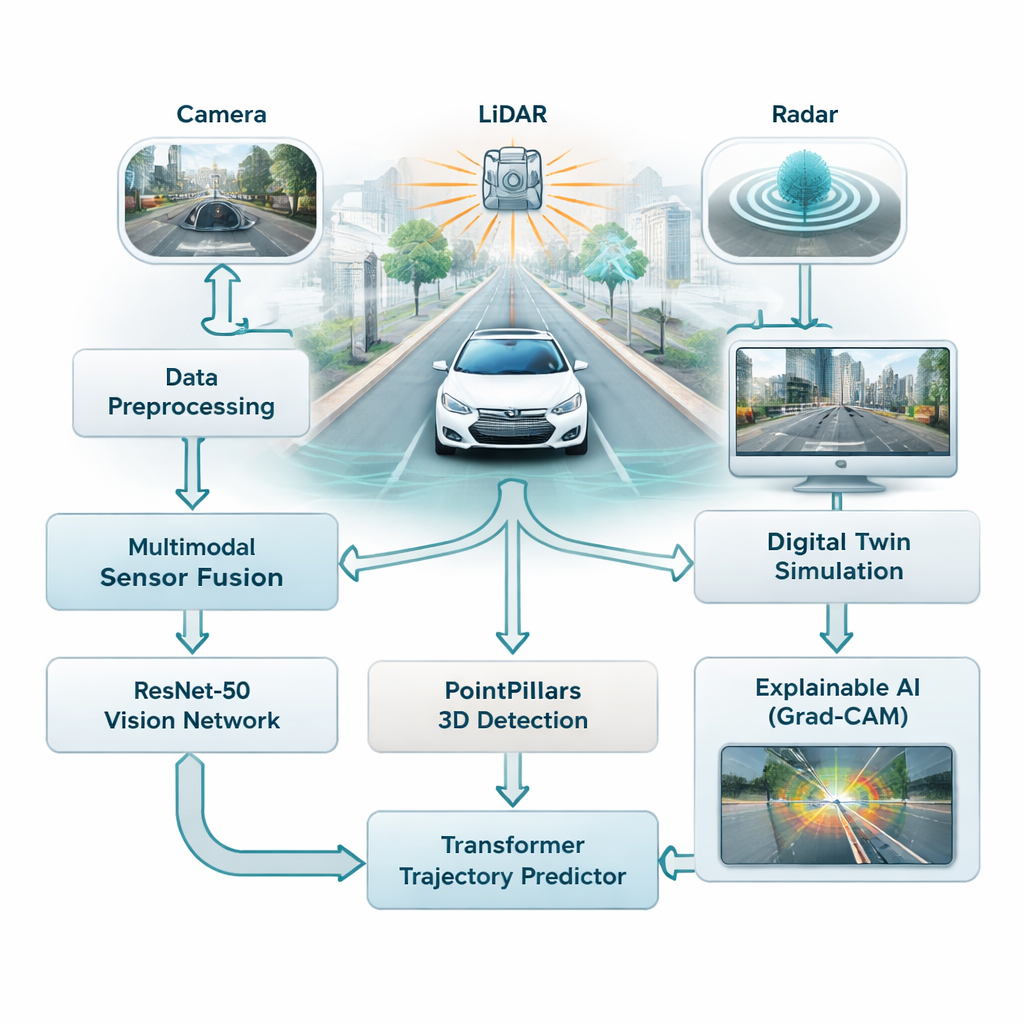
今日の多くの運転支援システムはカメラに大きく依存しており、良好な光条件では有効ですが、霧や雨、夜間では性能が落ちます。本研究はカメラ、レーザースキャナ(LiDAR)、レーダーという三種類のセンサーを組み合わせ、単一の脆弱な情報源に頼らない構成をとります。カメラは色や細部といった豊かな情報を捉え、LiDARはシーンの正確な3次元像を構築し、レーダーは悪天候でも信頼できるデータを供給します。著者らはこれら三系統のデータを融合して交通の単一のビューを作り上げ、車両が道路や歩行者、他の車両をより完全かつ信頼性高く理解できるようにしています。
車に認識と予測を教える
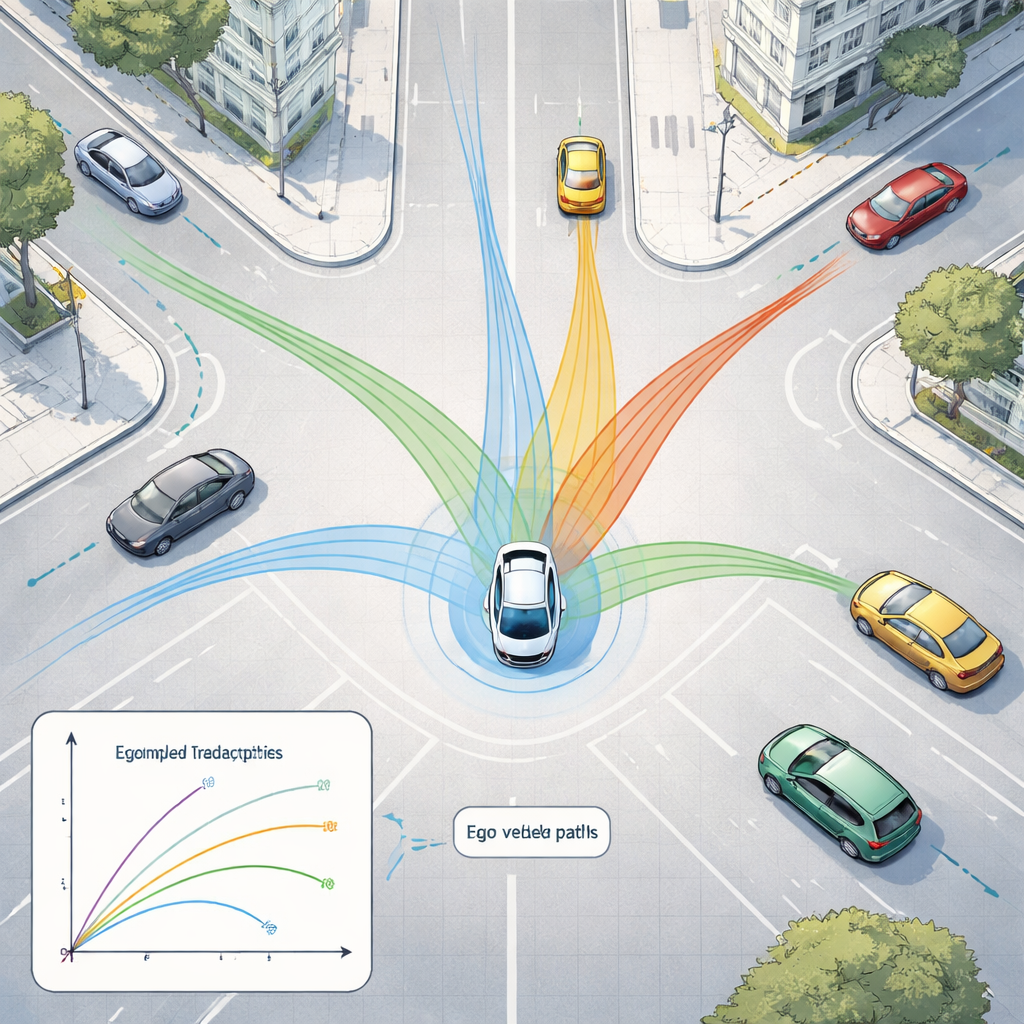
この大量のデータを理解するために、フレームワークは二つの系統の最新AIモデルを用います。まず、ResNet-50という深層画像ネットワークがカメラ画像を走査し、道路の混雑状況、車線の見え方、シーンの配置など全体的な状況を捉えます。同時に、PointPillarsという3DモデルがLiDARの点群を読み取り、車両やその他の物体の位置を三次元で特定します。これらの信号は次にTransformerという、もともと言語処理向けに設計されたAIへ送り込まれ、時間的変化の理解に優れた能力で近接する車や他の移動物体が今後数秒でどう動くかを、過去の運動と道路構造を考慮して予測します。
安全な仮想テストコースの構築
危険な状況を公道で直接試す代わりに、研究者らはシステムをデジタルツイン――ボストンとシンガポールの大規模公的データセットに基づいた実際の市街地の仮想複製――に接続します。このシミュレーション世界では、車のセンサーや運動、周囲の状況を再生・自由に変更でき、AIは物体の追跡や将来軌道の予測を試みます。システムはこれらの「もしも」シナリオをリアルタイムで実行でき、応答時間は50ミリ秒未満に抑えられるため、急ブレーキや急旋回、混雑した交差点などのエッジケースを誰も危険にさらすことなく検証できます。
AIの「ブラックボックス」をのぞく
深層学習へのよくある批判は、モデルがなぜ特定の判断を下したのか理解しづらい点にあります。これに対処するために、著者らはGrad-CAMという手法を用い、モデルの出力に最も影響した画像の部分を強調表示します。これらのヒートマップは、たとえばネットワークが軌道推定時に別の車や歩行者、車線標識のどこに注目しているかを示します。説明手法はオフラインで実行され車のリアルタイムループには組み込まれませんが、エンジニアや安全審査担当者がシステムが適切な手がかりに注意を向けているかを検証するうえで役立ち、公共の信頼構築にとって重要です。
どれだけ運転が改善されるか?
数百件の都市走行シーンで試験した結果、提案フレームワークは3D物体を高精度に検出し、単純な等速・等加速度を仮定する物理ベースのルールよりも運動をより正確に予測しました。その予測誤差――予測位置が実際とどれだけずれるか――はこれらのベースラインより有意に小さく、強力なリカレントAIモデルに近い精度を保ちつつリアルタイム運用に十分な高速性を維持しています。異なるネットワーク設計を比較する慎重な実験により、より深い画像モデルと中程度の深さの3D検出器が精度と速度の最良のバランスを取ること、またモデル圧縮後には小型の車載コンピュータ上へ展開可能であることが示されました。
一般のドライバーにとっての意義
専門外の読者に向けた要点は、安全で信頼できる自動運転車は複数のセンサーを融合し、シーンの将来変化を予測し、現実的な仮想世界で徹底的に検証するアプローチから生まれる可能性が高いということです。知覚、予測、シミュレーション、人間が理解できる説明を一つの設計に結び付けることで、本研究は自動車が謎めいた機械ではなく、道路上で慎重かつ透明なパートナーとして振る舞うことに近づけます。
引用: Almadhor, A., Al Hejaili, A., Alsubai, S. et al. A multimodal learning and simulation approach for perception in autonomous driving systems. Sci Rep 16, 5505 (2026). https://doi.org/10.1038/s41598-026-35095-3
キーワード: 自動運転, センサーフュージョン, 軌道予測, 3D物体検出, デジタルツインシミュレーション