Clear Sky Science · ja
エポックベースの事前アニーリングによる植物成長点の局所化
飢えた世界のためのより賢い除草
世界の人口が増える中、農家は化学物質の使用を減らしつつより多くの食料を生産し、環境を守るという重圧にさらされています。大きな課題のひとつは、有益な作物を傷つけずに雑草を取り除くことです。本稿では、機械が植物の成長点、つまり植物がそこから成長する正確な位置を特定できるようにする新しい人工知能(AI)トレーニング手法を紹介します。これによりレーザーや電気式除草機などのツールが雑草を外科的精度で狙い、作物を無事に残すことが可能になります。
成長点が重要な理由
雑草は作物から日光・水分・栄養を奪い、収量を減らし食料安全保障を脅かします。農家はしばしば除草剤に頼りますが、多用は健康や汚染、耐性雑草の問題を生みます。炎、電気、レーザーといった新しい除草技術は、機械的あるいはエネルギー照射で植物を破壊するため、よりクリーンな制御を約束します。安全に動作させるには、これらのシステムが作物と雑草を区別し、損傷が最も効果的な茎の付け根などの小さな成長点を正確に特定する必要があります。既存の多くのコンピュータビジョンツールは植物全体の検出は得意でも、これらの小さな目標を現場でのリアルタイム用途に十分な精度と速度で見つけるのは難しいことが多いのです。
単純な色手がかりを強力なガイダンスに変える
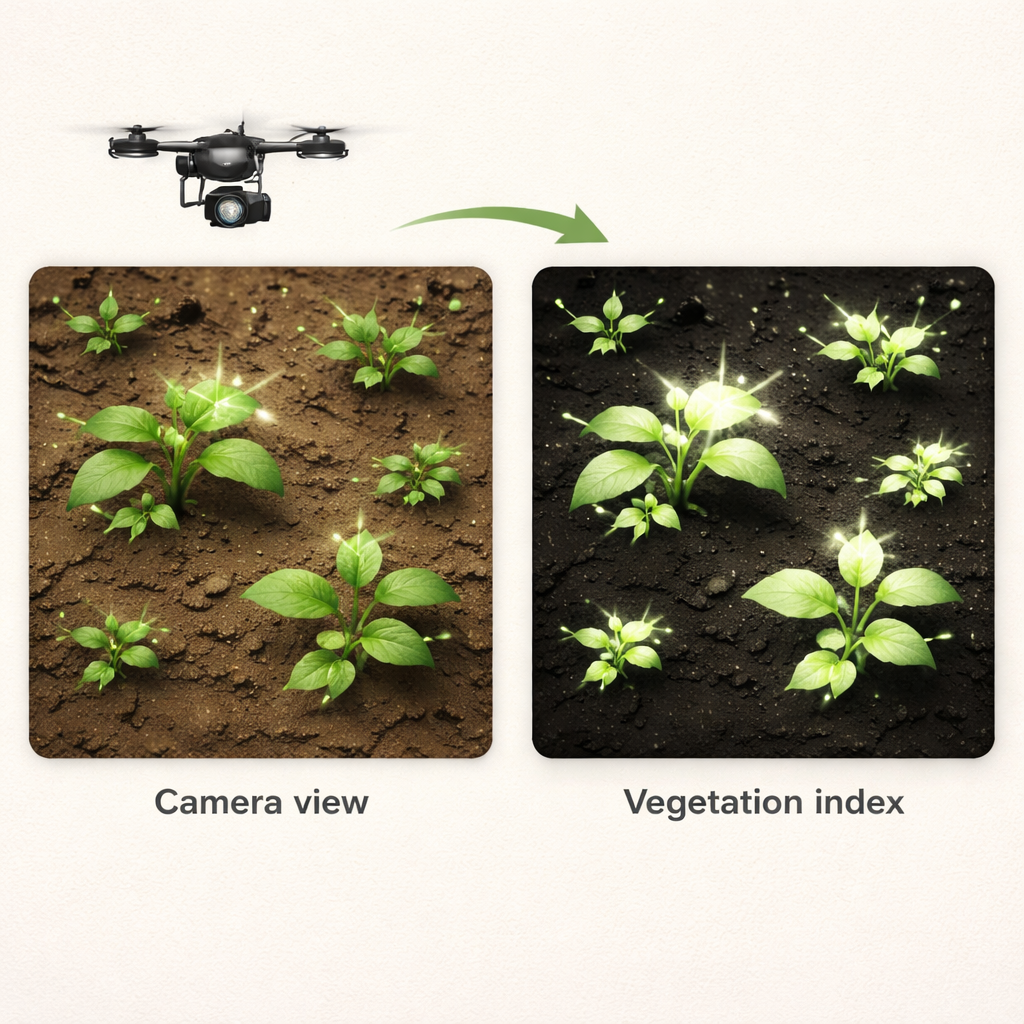
研究者たちは単純な着想に基づいています:緑色の植物は通常のカラー写真では茶色い土と見た目が異なる、という点です。よく知られた色指数であるExG-ExR植生指標は、各ピクセルの赤・緑・青の値を組み合わせて植物ピクセルを明るく、土壌ピクセルを暗く際立たせます。この指数は追加のセンサーを必要とせず標準的なカメラから計算できます。新しいシステムでは、この植生指数を通常の3チャネルに加えて4番目の入力として人気のAI検出器YOLO-Poseに与えます。この4チャネルの情報によりモデルは植物の位置をよりはっきりと把握でき、成長点を探す際に注目すべき領域を絞り込めます。
易しいものから難しいものへAIを教える
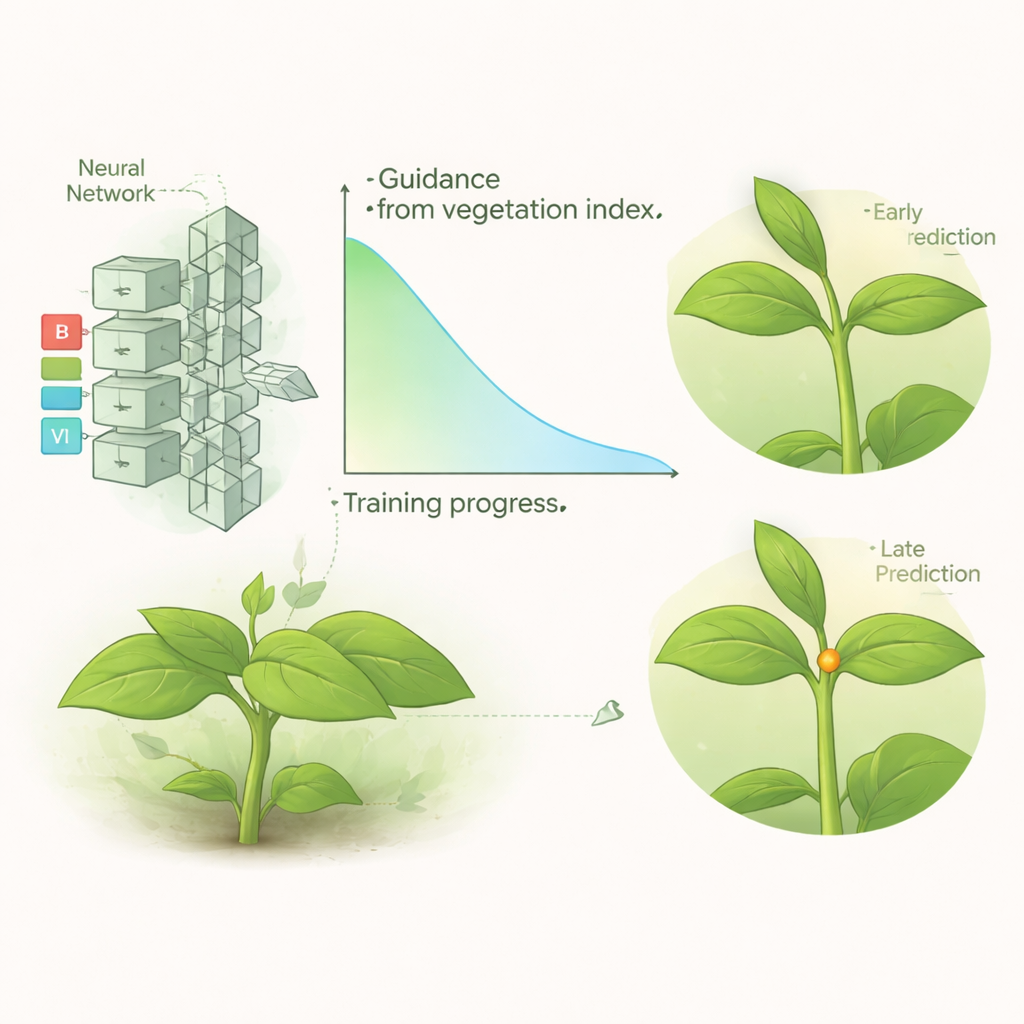
単に追加の情報を与えるだけでは不十分で、モデルはそれをどう使うかを学ぶ必要があります。チームは「エポックベースの事前アニーリング(EPA)」という戦略を導入しました。これは人間の学習にヒントを得たものです。トレーニングの初期段階では、植生指数を手がかりとしてモデルが予測した成長点を植物領域の内部に収めるよう強く促します。もしポイントが土壌に置かれれば罰則(ペナルティ)を重くし、植物ピクセル内にある場合は罰則を軽くします。トレーニングが進むにつれて、このガイダンスは滑らかなスケジュールで徐々に弱められ、粗い色手がかりに頼るのを減らして、モデルが学んだ細かい視覚パターンに基づいて判断する余地を与えます。最終的には、AIは必ずしも最も緑色のピクセルに引き寄せられるわけではなく(それが真の成長点でない場合もある)、自ら位置を微調整できるようになります。
実際の圃場での検証
この手法を検証するため、著者らは複数の作物種と多様な雑草を含む数千枚の圃場画像を持つ二つの実データセットでモデルを訓練しました。植生チャネルの有無とEPAトレーニング戦略の有無でYOLO-Poseモデルのバージョンを比較しました。植生指数を追加するだけでも控えめな改善が見られましたが、EPAと組み合わせることで成長点の精度に明確な向上が生じ、標準的な検出スコアで約2.4パーセンテージポイントの改善が得られました。これによって植物全体を囲むバウンディングボックスを描く能力が損なわれることはありませんでした。追加の計算コストは極めて小さく(総コストの0.5%未満)、資源が限られた農業ロボットにも適しています。異なる照明条件、土壌の湿り具合、さらに異なるYOLOモデル版にわたるテストでもこの戦略は広く有用であることが示されましたが、事前ガイダンスをどの程度強く、どのくらいの期間適用するかにはやや敏感でした。
未来の農業への意味
非専門家向けの主なポイントは、AIの訓練方法に小さな工夫を加えるだけで(初めは単純な色に基づく手がかりを使い、徐々にモデル自身に判断させる)、機械が作用すべき植物の正確な箇所をはるかにうまく見つけられるようになる、ということです。成長点局所化の改善は、将来の除草ロボットが雑草に対して正確に電気パルスやレーザービームを向け、作物を保護しながら除草剤の使用と環境影響を低減するのに役立ちます。同じ戦略は他の種類の植物信号やAIモデルにも応用可能であり、持続可能で高精度な農業を支える、より賢く信頼性の高いビジョンシステムへの道を開くでしょう。
引用: Ma, C., Zhang, Z., Tian, F. et al. Plant growth point localization via epoch-based prior annealing. Sci Rep 16, 4994 (2026). https://doi.org/10.1038/s41598-026-35009-3
キーワード: 精密農業, 雑草対策, コンピュータビジョン, ディープラーニング, 植物の成長点