Clear Sky Science · ja
物理導入の適応強調と注意強化を備えた改善型二重ドメインYOLOv11-UOSによる高精度リアルタイム水中物体セグメンテーション
より鋭いデジタルの眼で海底を覗く
海洋探査はダイバーや潜水艦だけでなく、水中ロボットに搭載された賢いカメラによって行われることが増えています。これらのカメラは難破船の捜索や海底パイプラインの点検、サンゴ礁や魚類個体群の監視に役立ちます。しかし水中画像はしばしば濁り、青緑色の色かぶりと視覚的ノイズに満ち、人間でも物体を識別しにくく、ましてやコンピュータにとっては困難です。本論文は、水中画像を補正してから物体を迅速に検出・輪郭抽出する新しいコンピュータビジョンシステムを紹介します。リアルタイムのロボット任務を導くのに十分な速度を備えています。
水中で視認が難しい理由
光は空気中とは異なる挙動を水中で示します。太陽光が水中を進むとき、赤色成分が最初に失われ、次に緑が薄れ、結果として青みがかった色合いと低コントラストの風景が残ります。水中の微粒子は光を散乱させ、ヘイズを生み出してエッジをぼかし、小さなディテールを隠します。従来の物体検出プログラムや最新の深層学習モデルでさえ、こうした歪んだ画像に苦戦します:魚はサンゴに溶け込み、人工物は背景に紛れ、低照度の場面はほとんど読めなくなります。これまでの研究は画像補正か物体検出のいずれか一方に取り組むことが多く、その結果システムが遅すぎたり脆弱だったり、特に濁った水中では十分に機能しないことがありました。
二段階戦略:まず補正し、次に焦点を合わせる
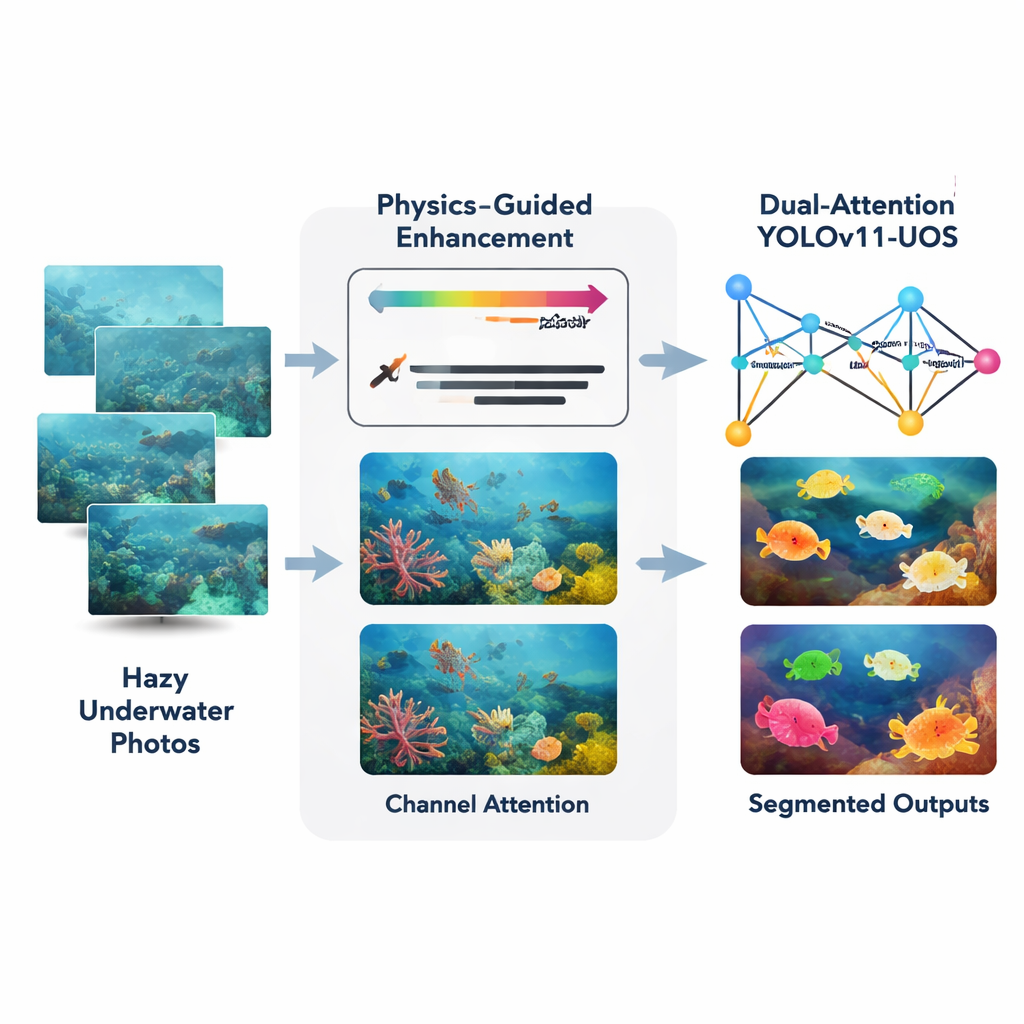
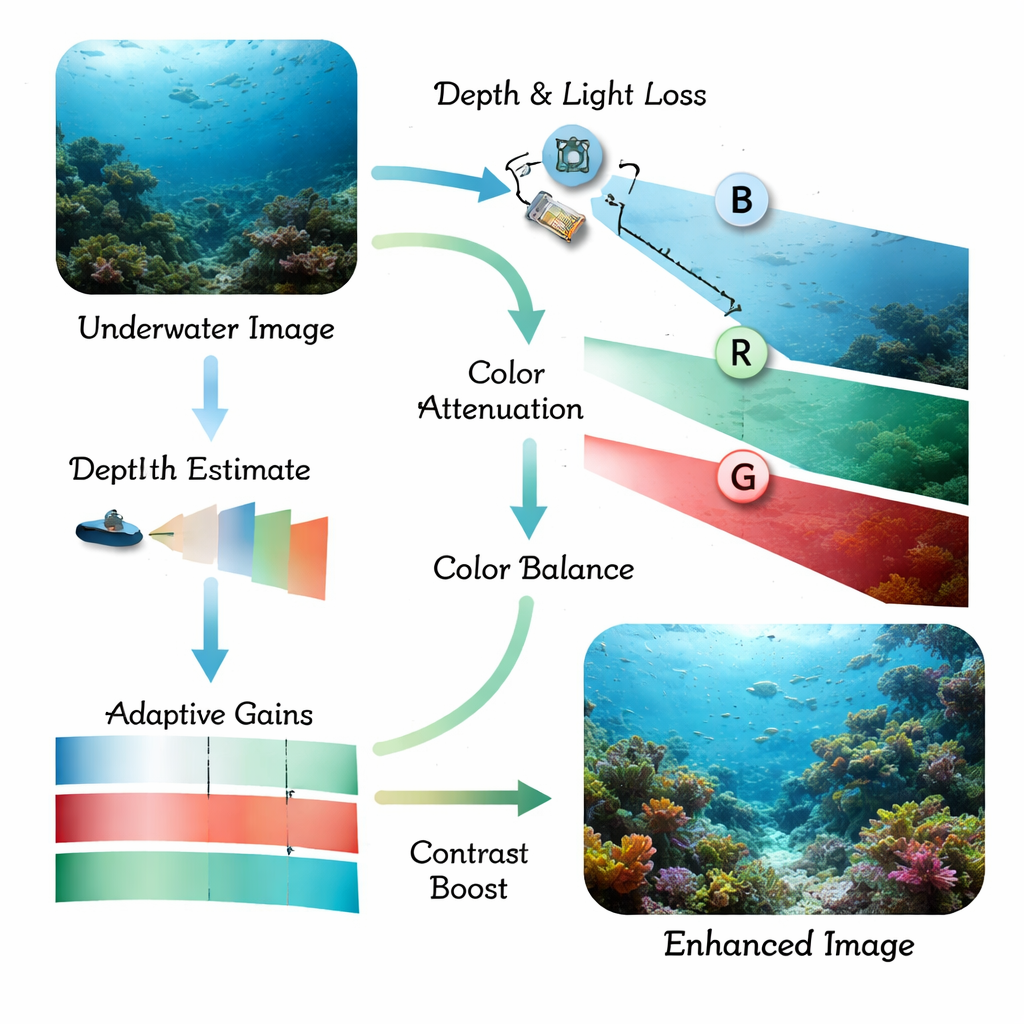
著者らは、最近のリアルタイム検出器YOLOv11を基盤に、水中シーンとインスタンスセグメンテーション(各物体の精密な輪郭描画)向けにカスタマイズした統合アプローチを提案します。まず前段モジュールである「Adaptive Physics‑Guided Enhancement(適応型物理誘導強調)」が生の水中写真を受け取り、水中での光の吸収・散乱を簡略化した物理モデルに基づいて補正します。シーン内各領域のカメラからの距離を推定し、赤色が緑や青よりも強く失われることを補償します。これによりより自然な色再現と局所コントラストの改善が得られ、さらにヒストグラムに基づく慎重な処理で暗所や濁った領域でもノイズを増幅せずにエッジを強調します。
ネットワークに注目すべき場所を教える
画像が補正された後、注意機構を備えた改良型YOLOv11バックボーンに渡されます。追加されたモジュールはスポットライトとカラーフィルタのように働きます。空間的注意(spatial attention)は魚の輪郭や沈没物の縁など重要な領域により注意を向け、砂や揺れる水草のような気を散らす背景を無視するようネットワークに指示します。チャネル注意(channel attention)は色やテクスチャのパターンに対する重み付けを調整し、有益な視覚情報を強調して無関係な情報を抑えます。これら二重の注意段階により、ネットワークは物体の存在と種類を判断する前により鮮明な内部表現を構築できます。
実海域と過酷条件での評価
システムの実用性を評価するため、研究者らは複数の公開水中画像コレクションと、深度や濁りが異なる沿岸域から集めた7,000枚超の精査されたラベル付き写真を含む新規カスタムデータセットで学習と検証を行いました。標準的な検出・セグメンテーション指標を計測し、U‑Net、DeepLab、トランスフォーマーベースのセグメンター、そして新モジュールを持たないベースラインYOLOv11などの広く用いられるモデルと比較しました。補正と注意を組み合わせた設計は、ベースラインYOLOv11比で平均検出精度を約6.5パーセントポイント向上させ、物体輪郭が明瞭になり、見逃しや誤検出が目立って減少しました。重要なのは、このシステムが最新のGPU上で約38フレーム毎秒で動作し、ロボットプラットフォームでの準リアルタイム使用に十分な速度を保っている点です。
海洋ロボットと研究にとっての意義
平たく言えば、本研究は賢い前処理と焦点を絞る注意機構によりコンピュータの水中可視性が大きく向上することを示しています。まず水中特有の物理効果を部分的に打ち消して画像を整え、次に検出ネットワークが情報価値の高い領域や色に集中するよう誘導することで、魚やサンゴ、人工構造物の輪郭をより鋭く信頼性高く抽出できます。これにより自律型水中ビークルの安全な航行、脆弱な海洋生態系の監視、重要な海底インフラの無人点検が支援されます。極めて濁った水や深海のように赤色光がほとんど届かない条件では課題が残りますが、本フレームワークは堅牢でリアルタイム可能な水中ビジョンに向けた実用的な一歩を提供し、将来的な3Dマッピングや多センサーによる海洋探査を支える基盤となり得ます。
引用: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. An accurate realtime underwater object segmentation using improved dual-domain YOLOv11-UOS with physics guided adaptive enhancement and attention-boosting. Sci Rep 16, 4804 (2026). https://doi.org/10.1038/s41598-026-35001-x
キーワード: 水中ビジョン, 海洋ロボティクス, 画像強調, 物体セグメンテーション, コンピュータビジョン