Clear Sky Science · ja
EDAを用いた説明可能なAIによるV2Iパス損失予測
なぜ賢い車─路側リンクが重要なのか
現代の自動車は、信号機や路側機器、その他のインフラと無線で送受信しながら周囲とますますやり取りするようになっています。これらのリンクは安全警報や交通管理、将来的には自動運転に役立ちます。しかし都市の道路は無線環境として雑多です:高層ビル、樹木、橋、大型トラックなどが信号を弱めたり遮ったりします。本稿は、そのような信号の減衰を、正確であるだけでなく、システムを信頼しなければならない技術者や規制当局が理解できる形で予測する方法を示します。
モデルを信頼する前にデータを観る
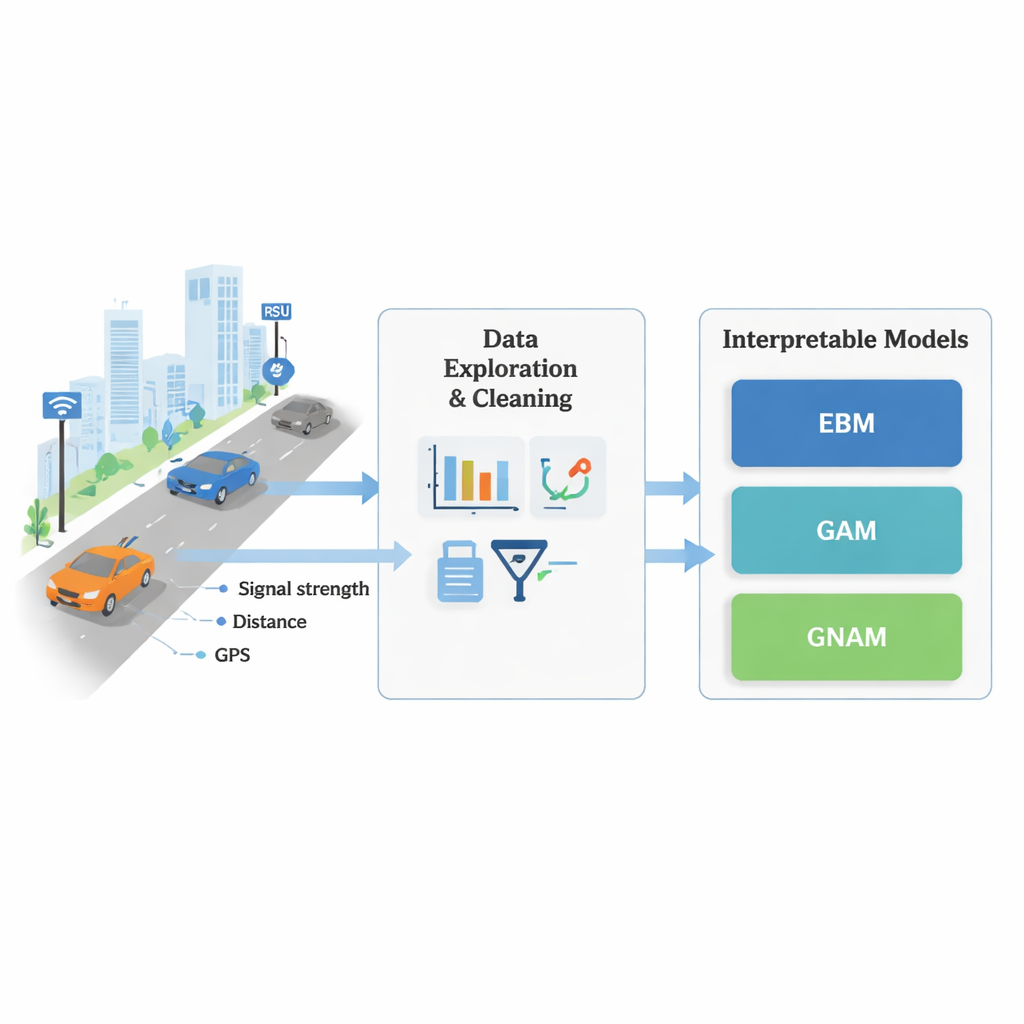
著者らはまずイタリア・ボローニャで行われた大規模な測定キャンペーンを出発点とします。アンテナを装備した車両が24種類の都市環境—直線道路、ロータリー、並木道、橋、交通量の多い地域—を走行し、路側送信器と通信しました。これらの測定から、道路から車まで信号がどれだけ減衰するかを示す「パス損失」を導出します。予測モデルを構築する前に、分布のプロット、相関の確認、視線良好、遮蔽、植生などの代表的な7つのケーススタディへのデータ分割といった注意深い探索的データ解析を行います。この段階で、予測の信頼性を確保するために対処すべきノイズ、外れ値、隠れたパターンが明らかになります。
実世界の無線データの混乱を整理する
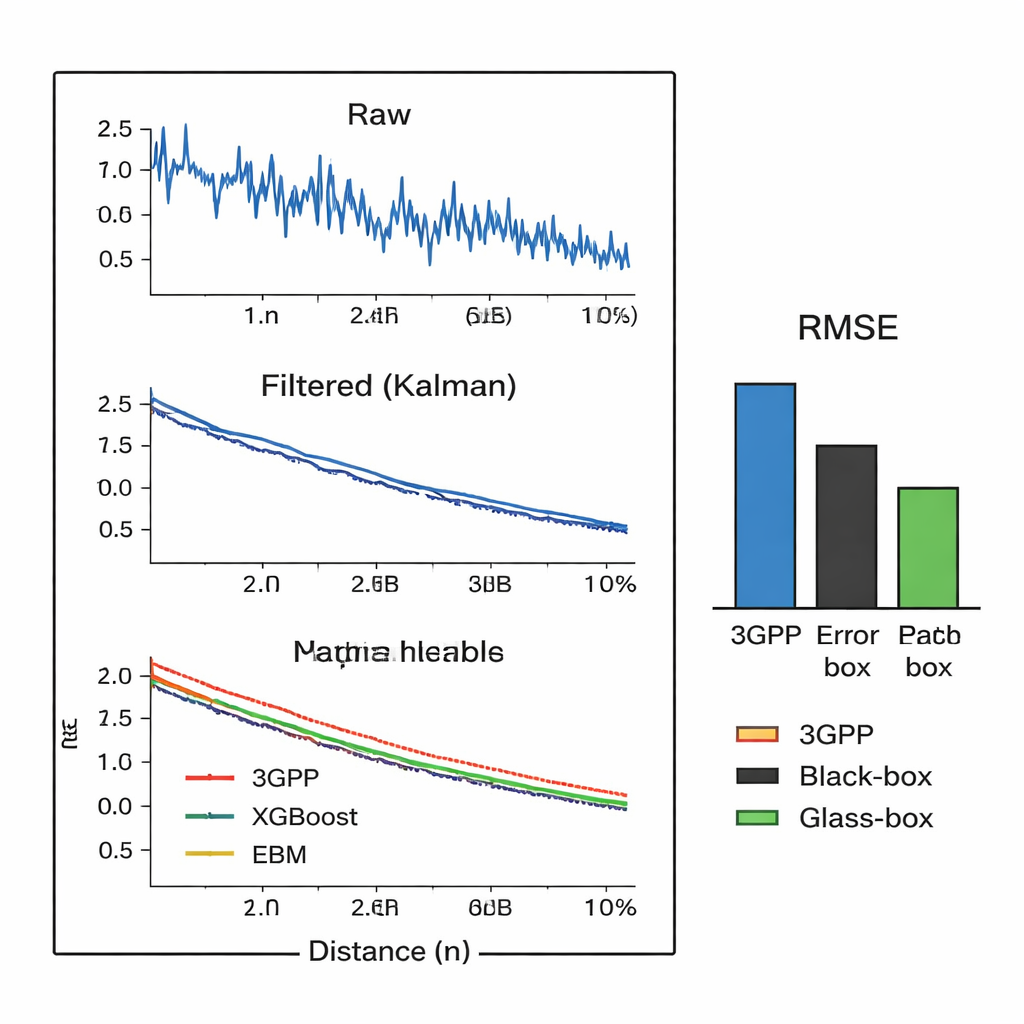
実世界の無線データは、測定誤差、建物からの反射、通過車両による突然の遮蔽などによる不規則性に満ちています。研究者たちはこの混乱を抑える前処理パイプラインを設計しました。まず距離、車両位置、速度などの入力特徴量を比較可能にするために再スケーリングします。次に、極端で一貫性のない測定値を切り捨てる頑健な統計的ルールで外れ値を除去します。最後に、制御理論で古典的なツールである最適化済みカルマンフィルタを適用して、基礎にある傾向を保ちつつ距離に沿って信号を平滑化します。フィルタのパラメータを下流モデルの性能を最大化するよう調整することで、このクレンジング処理は予測誤差を半分以上削減し、モデルが学習できる安定したパターンを明らかにすることを示しています。
AIのブラックボックスを開く
3GPPや二重スロープモデルのような従来の無線計画式は単純で透明性がありますが、密集した都市の複雑さをとらえられないことが多いです。一方で、ランダムフォレストやXGBoostのような人気の機械学習手法は高い精度を達成しますがブラックボックスとして振る舞い、なぜその予測が出るのかの洞察をほとんど提供しません。本稿はその中間の道を志向します:数学的に解釈可能な範囲で十分に単純でありながら非線形挙動を捉えられる「ガラスボックス」モデルです。著者らは、Explainable Boosting Machines、Generalized Additive Models、Generalized Neural Additive Modelsの三つのモデルを、標準的なブラックボックスアルゴリズムや古典的な式と並べてテストし、すべてのシナリオに対して厳格な学習―テスト分割と5分割交差検証を行っています。
実際の道路で信号損失を駆動する要因
クレンジング済みのデータと解釈可能なモデルを組み合わせることで、著者らは都市におけるパス損失に最も影響する要因を特定できます。路側機器と車両の距離が支配的であることは予想通りですが、車両の正確なGPS座標や時刻も寄与しており、街路配置や交通パターンがチャネルをどう形作るかを反映しています。建物裏のNLOS区間、橋の下、樹冠を通る区間、大型車が多い状況といった複雑なシーンでは、ガラスボックスモデルは最良のブラックボックスモデルに匹敵するかやや劣る精度を示す一方で、各要因が予測をどのように押し上げるか下げるかを明確に示します。本研究は計算時間とエネルギー消費も評価しており、これらの解釈可能なモデルが路側機器や車載機器でリアルタイム運用できるだけの高速性と軽量性を備えていると結論づけています。
より安全で透明な車両ネットワークを構築する
一般読者にとっての主要メッセージは、混雑した都市でも車が路側から受信する信号の良否を、精度と明瞭さの両方で予測できるようになったということです。誰も完全には理解していない不透明なAIに頼る代わりに、このフレームワークはデータ探索、ノイズ除去、説明可能なモデルを組み合わせて、ほぼ最先端の精度を提供しながらどの要因が重要かを正確に示します。その透明性は、安全に関わるVehicle-to-Everythingシステムにとって極めて重要であり、技術者や規制当局、さらには裁判所が判断を監査する必要が生じた場合にも役立ちます。本研究は、単に高速で信頼できるだけでなく、説明可能で設計・試験・信頼がしやすい将来の5G/6Gの車─路ネットワークへの道筋を示唆しています。
引用: Ameur, M.B., Chebil, J., Habaebi, M.H. et al. Explainable AI with EDA for V2I path loss prediction. Sci Rep 16, 4954 (2026). https://doi.org/10.1038/s41598-026-34987-8
キーワード: 車両とインフラ間通信, パス損失予測, 説明可能なAI, 無線チャネル, 5G V2X