Clear Sky Science · ja
鉄道向け長距離LiDAR–カメラ外部キャリブレーション手法
遠方から列車の安全を守る
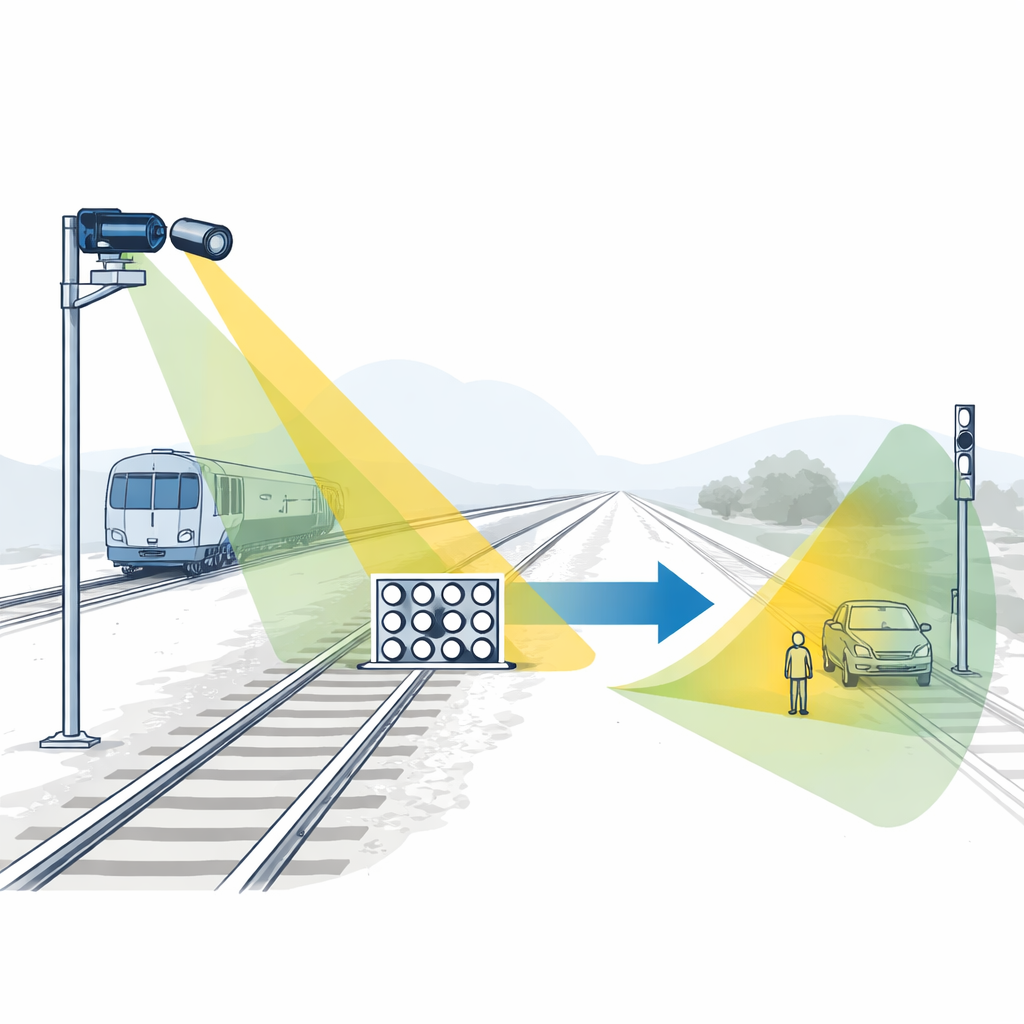
現代の無人運転列車は、人間が目にするよりも遥かに早く軌道上の障害物を検出するために電子的な「目」に依存しています。最も重要な目のうちの二つはカメラとLiDARと呼ばれるレーザースキャナで、どちらも世界を異なる方法で感知します。両者が協調して動作するには高精度で整合されている必要があり、これは数百メートル先の線路を監視する場合に意外なほど難しくなります。本研究は、長距離でも信頼して鉄道システムを守れるように、これらのセンサーを整合させる新しい方法を提示します。
なぜセンサーの整合が重要か
自律列車では、カメラが細かな色情報を捉える一方で、LiDARは光パルスの往復時間を測ることで距離を測定します。これら二つの視点を融合することで、踏切で立ち往生した車両や線路上の破片など、軌道領域に侵入する可能性のある物体を検出・追跡できます。しかし、融合が機能するためには、カメラとLiDARが互いにどの位置・向きにあるかを正確に把握している必要があります。小さなずれでも、遠距離では検出された障害物の位置が数センチ、あるいは数メートルずれることがあり、自動保護システムの応答を遅らせたり信頼性を下げたりする可能性があります。
線路の遠方を見ることの難しさ
鉄道用途では、カメラが数百メートル先の物体を明瞭に捉えるために望遠レンズが使われることが多いです。しかしそのような距離では、キャリブレーションターゲットに対するLiDARの反射点は非常にまばらになります。センサーを整合するために使われる既存手法の多くは、LiDAR点群が密であることやシーンに豊富なエッジが存在することを前提としており、長距離ではこれらの条件は成り立ちません。その結果、2D画像と3D点群の間で安全な列車制御に必要な精度で対応する特徴を見つけるのが困難になります。
賢いキャリブレーションボード
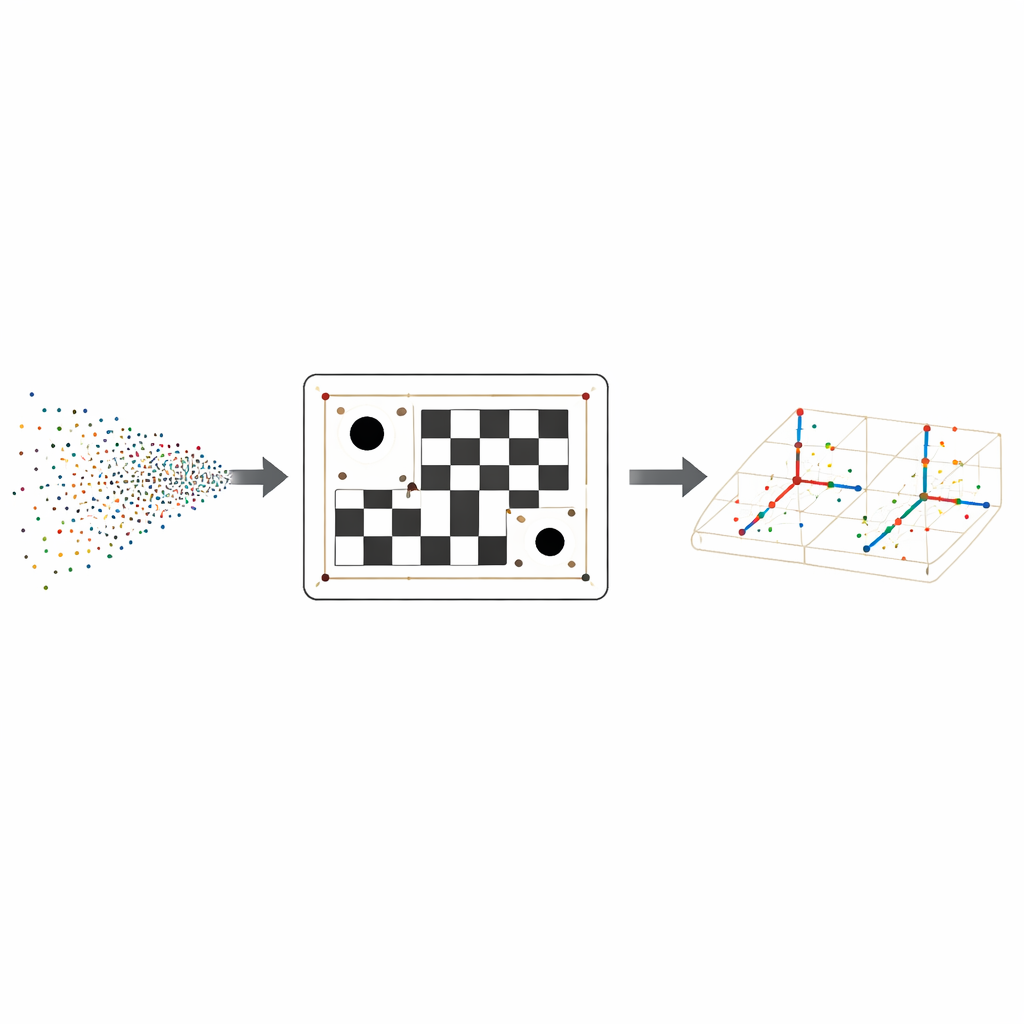
これを克服するために、著者らは黒白のチェッカーパターンと、中心が不規則な三角形を形成する三つの円形穴を組み合わせた特別なキャリブレーションボードを設計しました。チェッカー柄はカメラ画像に多数の正確なコーナー点を供給し、一方で穴はLiDARに対して強い幾何学的手がかりを生み出します。遠方でもLiDARは円の端を検出しやすいためです。三つの穴が非対称の三角形に配置されているため、鏡像や回転による混同を避けてボードの向きを空間上で一意に決定できます。
まばらな点を信頼できる対応に変える
LiDAR側では、まず点群をクリーンアップしボードを表す平面をフィッティングします。次に点をこの平面に射影し、ロバストな円フィッティング手法で各穴の中心を見つけ、穴間の既知の物理的距離を課すことで位置を精緻化します。穴の中心の三角形が確立されると、アルゴリズムはボード上に局所座標グリッドを構築し、各チェッカーコーナーが3D空間のどこにあるはずかを予測し、近傍のLiDAR点の反射強度(明るさ)を確認します。幾何と反射強度の組み合わせにより、散在した数点からでもカメラの2Dコーナーに対応する信頼できる3Dコーナー位置群を得られます。
センサー関係の微調整
同じ物理的コーナーがカメラ画像とLiDAR点群の両方で特定されると、著者らは二つのセンサーを結ぶ正確な回転と並進を解きます。彼らは反復最適化手法を用いて、この関係を繰り返し調整し、LiDAR点が画像上に投影される位置とカメラが実際にコーナーを観測する位置とのズレを縮めます。実際の鉄道プラットフォームで、中望遠から強い望遠まで異なるレンズを用いたテストでは、新手法は投影誤差を一ピクセル程度以下に安定して抑え、特にデータが最も乏しい長焦点域でいくつかの既存手法より優れた性能を示しました。
鉄道安全への意義
平たく言えば、本研究は自律列車のカメラとLiDARに対して「あなたはここにいて、まさにこの方向を見ている」ということをより信頼性高く伝える方法を提供します。キャリブレーションボードの再設計とまばらなLiDARデータに対する賢い処理を組み合わせることで、センサーが数百メートル先のシーンを監視している場合でも高精度を維持します。このより厳密な整合により、融合システムは障害物を3D空間により正確に配置でき、より安全な鉄道輸送と現実世界における多センサー知覚の信頼性強化の技術的基盤を強めます。
引用: Liu, X., Wang, H., Ruan, S. et al. A long-range LiDAR–camera extrinsic calibration method for rail transit. Sci Rep 16, 8018 (2026). https://doi.org/10.1038/s41598-025-34547-6
キーワード: 鉄道輸送の安全性, LiDAR・カメラ融合, センサー校正, 自律走行列車, 長距離知覚