Clear Sky Science · ja
直接システム較正と微弱レーザー線抽出を用いた浅海構造の3D再構成
隠れた水中世界を可視化する
沈没船、沈んだ都市、沿岸遺跡など、過去の興味深い痕跡の多くが現在は海中にあります。これらの遺構をデジタルに調査・保存するには、海底にあるものの正確な3D地図が必要です。しかし浅い水域では、強い日光、浮遊する砂、そして水そのものが測定を著しく困難にします。本論文は、低出力の青色レーザーと、直接的なシステム較正および微弱なレーザー線の抽出手法を組み合わせ、日光が差し込むノイズの多い条件下でも詳細な水中構造の3Dモデルをスキャン・再構成する新しい方法を提示します。
浅海スキャンがこれほど難しい理由
シーンのデジタル3Dモデルを作るとは、通常何百万もの空間上の点、いわゆる点群を組み立てることを意味します。陸上ではレーザーとカメラでこれが安定してできますが、水中では状況が複雑になります。水は光を曲げ散乱させ、青緑のヴェールでシーンを覆い、エッジをぼかします。波を通して差し込む日光はカスティクスと呼ばれる明滅する明暗模様を生み、低出力レーザーの細い線をかき消すことがあります。微粒子は靄やちらつく反射を付加します。その結果、多くの既存の水中システムは夜間や非常に低照度、あるいは厳密に制御された条件下でしか機能せず、実際の海の挙動には適していません。
回転する青色レーザーを3Dの筆のように使う
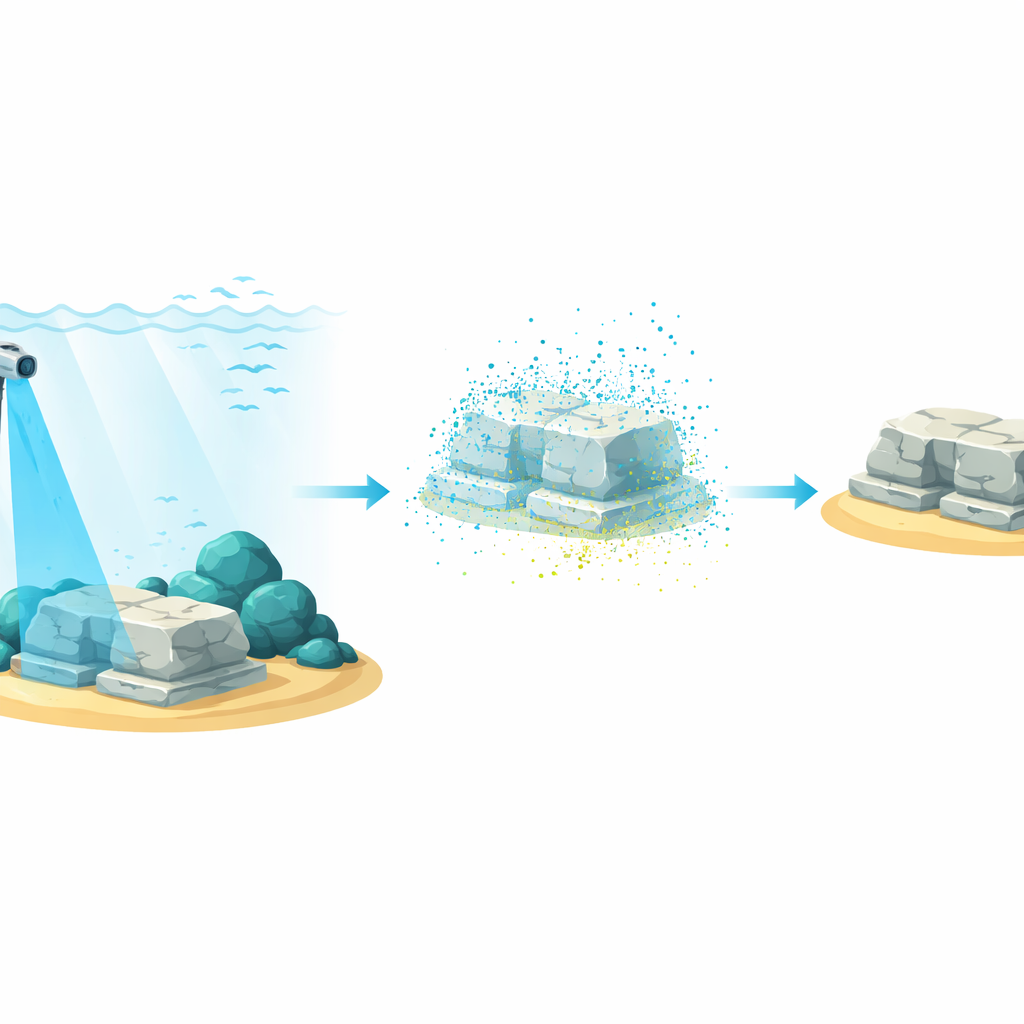
著者らはコンパクトで防水のスキャナを構築しました。これは3Dの筆のように振る舞います。薄い垂直の青色レーザーシートを投影し、装置のアームがゆっくり回転するにつれてこれが掃くように周囲を走ります。そのシートが岩や壁、工芸品に触れる場所では、光の曲線が描かれます。レーザーの隣に取り付けたカメラが各微小な回転ステップで画像を撮影します。これらの視点を組み合わせることで、周囲の詳細な密な3D点群を再構成でき、原画像から近似的な色を取得して後に面メッシュへ変換し可視化や仮想現実に利用できます。
各ピクセルが空間のどこにあるかを教える
この種のシステムで中心的な課題は較正です。各カメラピクセルが実世界の座標とどう対応するかを突き止める作業です。従来の手法はカメラや水の詳細な数学モデルに依存し、調整すべきパラメータが多数あるため脆弱で誤差が出やすくなります。ここでは研究者たちはデータ中心のアプローチを採ります。既知の格子で覆われた壁をスキャンして、画像ピクセルから3D位置への写像を直接学習します。必要なのは数百点の注意深く選ばれたサンプルだけです。一度ルックアップテーブルに保存すれば、このマップによりスキャナは検出した任意のレーザーピクセルを、複雑なカメラ方程式を明示的に解くことなく3D点に変換できます。
かすかな青い痕跡を整え増幅する
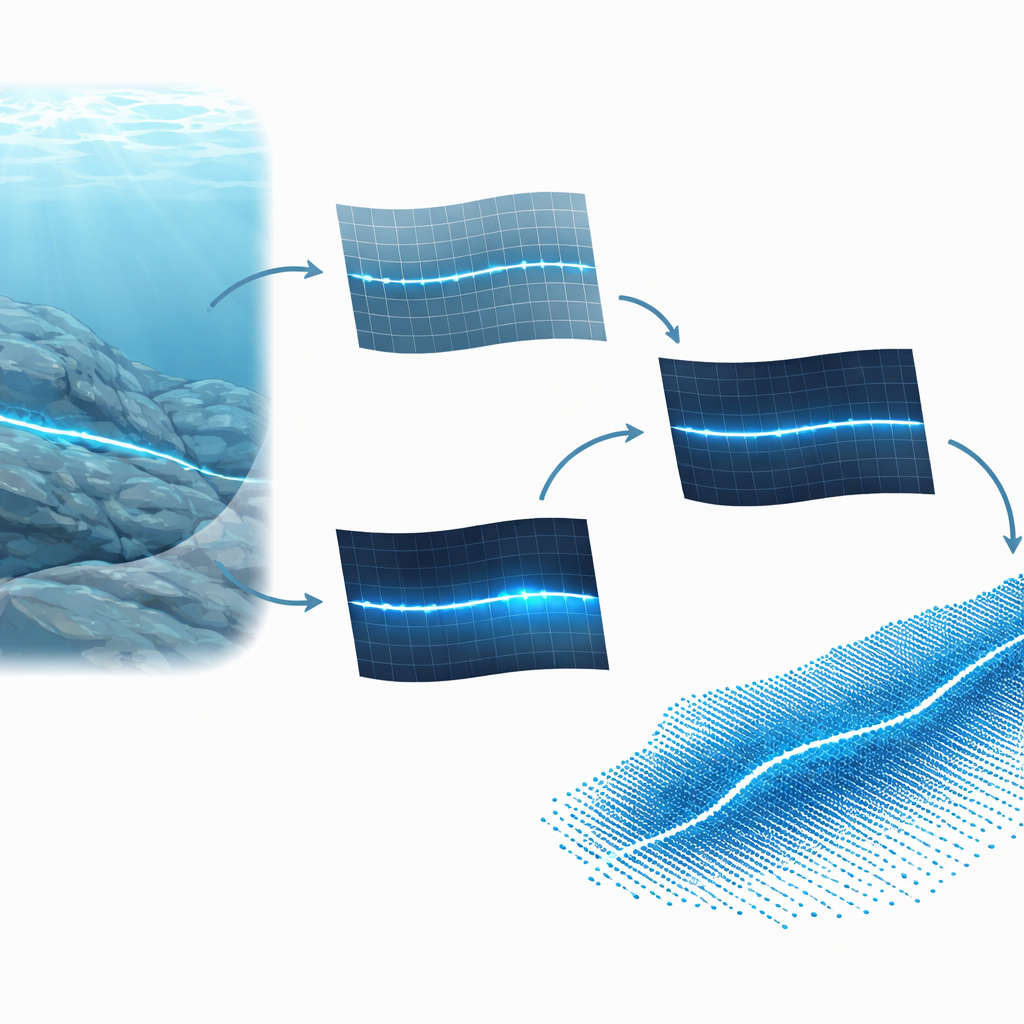
較正は空気中で行うため、水中映像はまず屈折による歪みを元に戻して「まっすぐにする」必要があります。チームは空気と水をまたぐ格子の画像を用いてこの歪みを測定し、各水中ピクセルが空気中で見えた場合にどのように移動するかを計算します。このデワーピングの後、本当の難所が始まります:ノイズの多い画像中で細く途切れがちな青い線を見つけることです。手法はまず各ピクセルに“青さ”の値を計算し、レーザーの青色に近い光を際立たせます。次に各ピクセルが周囲よりどれだけ青いかを見て、機械学習の分類器を使い、レーザーピクセルの可能性が高い領域の概略的な白黒マップを作成します。
ノイズの点からきれいな3D形状へ
その最初のマップには依然として砂、反射、カスティクスからの誤検出が多く含まれます。これを浄化するため、システムは古典的な手法であるハフ変換のような位置に基づく投票を用いて直線パターンを探索します。レーザーの期待される向きと一致する線のみを保持します。残った点に対して滑らかな曲線を当てはめ、その曲線に近くかつ青さが強いピクセルの“信頼度”を上げます。画像の各行について、最も信頼度の高いピクセルを最終的なレーザートレースの一部として選びます。こうして得られたクリーンなトレースをステップごとに較正テーブルに供給すると、元のカメラ画像の色を持つ3D点群が生成されます。
実際の水中でどの程度うまく機能するか?
著者らはタンク内および浅海(深さ約5メートル)でシステムをテストし、薄暗い室内レベルから真昼の強烈な日光(数万ルクス)にわたる照明条件下で実験しました。正確な寸法が分かっている物体(球体やカスタムのアクリル形状)をスキャンし、測定値を真値と比較しました。およそ半メートル程度までの距離では、典型的な誤差は明るい光下でもミリ単位のごく一部未満にとどまり、レーザー線が肉眼でほぼ見えなくなるまでより大きな距離でも数十〜数百ミリ単位の範囲に収まりました。暗所向けに設計された既存手法は、これほど高照度の条件ではまったくシーンを再構成できませんでした。
水中遺跡の探索にとっての意義
要するに、この研究は浅い水域の構造を正確に3Dマッピングするために、かさばる高出力レーザーや完全に制御された暗闇が必要ではないことを示しています。水による光の屈折を注意深く補正し、レーザーの色を強調し、ピクセルを実世界の位置に直接結びつける較正を用いることで、システムは日光の差し込むノイズの多い場面から微弱な青線を確実に抽出できます。非常に明るい条件や特定の物体色では性能が低下しますが、このアプローチはリーフ、港壁、沈没遺跡のより日常的で低コストなスキャンを可能にし、科学者や保存担当者が水中世界の忠実なデジタル複製を作る道を開きます。
引用: Garai, A., Kumar, S. 3D reconstruction of shallow sea structures using direct system calibration and faint laser line extraction. Sci Rep 16, 9321 (2026). https://doi.org/10.1038/s41598-025-25736-4
キーワード: 水中3Dスキャン, レーザー線再構成, 浅海マッピング, 点群イメージング, 水中考古学