Clear Sky Science · ja
マルチスケール分散エントロピーと最適化ニューラルネットワークに基づくUAV飛行制御RF信号の分類手法
隠れたドローンを見つけることが重要な理由
小型ドローンは安価で性能が高く、空撮や荷物配送から戦場での偵察まで至る所で使われています。しかし同じ技術は、スパイや密輸、空港や重要インフラへの妨害など悪用される可能性もあります。関係当局は、遠距離や建物の間を低空で飛行する場合でも、ドローンを迅速かつ確実に検出・識別する手段を必要としています。本稿は、ドローンとそのコントローラーの間で交わされる目に見えない無線のやり取りを聞くことで、空中にある機体がどのモデルかを認識する新しい手法を示しており、非常に雑音の多い条件でも異例の高精度を達成します。
現行のドローン検知手法の問題点
現在のドローン検知システムはレーダー、カメラ、赤外線センサー、マイクなどに依存していますが、それぞれ重大な欠点があります。レーダーは非常に小さく、速度の遅い目標に弱く、地上雑波に惑わされることがあります。光学・赤外カメラは天候や視界に依存し、霧や雨、暗闇では性能が低下します。音声検出は安価ですが短距離でしか有効でなく、背景雑音に容易にかき消されます。視覚ベースのディープラーニングは既知の機種を分類できますが、膨大なラベル付きデータを必要とし、新しい機種や敵対的な状況では失敗することがあります。これらの弱点は、特に都市部や低高度環境で空域セキュリティに隙間を残します。
ドローンの無線のやり取りを聞く
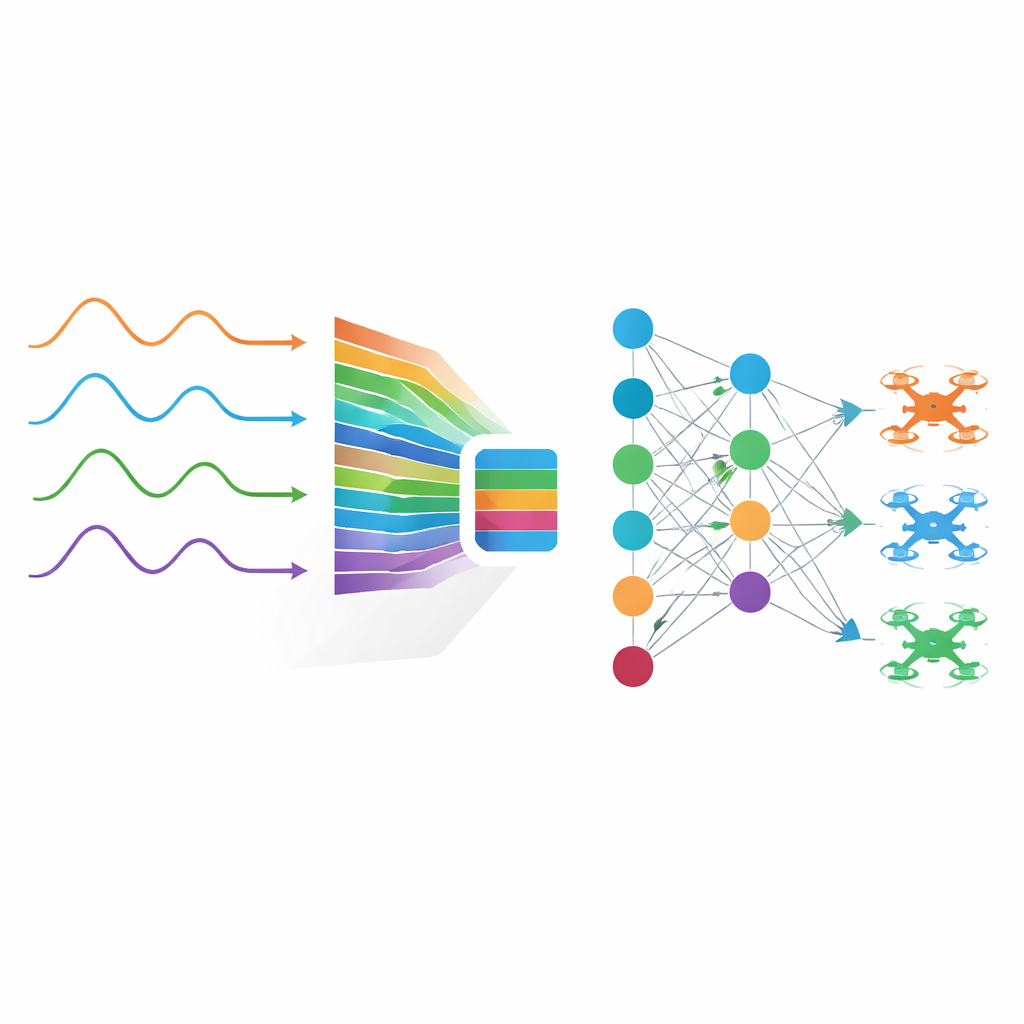
機体自体を見たり聞いたりする代わりに、著者らはドローンとリモートコントローラーの間の無線周波数(RF)制御信号に注目します。これらの信号は障害物を透過し、あらゆる天候で機能し、しばしば視認よりも早く・遠くで受信できます。ただし、単に信号強度や基本的なスペクトルを測るだけでは、電磁環境が混雑している中で異なるドローン機種を区別するには不十分です。研究チームはマルチスケール分散エントロピーという概念を用いており、簡単に言えば、複数の異なる時間窓で信号を見たときの予測不可能性や複雑さを追跡します。これを2つのアンテナ経路ごとに4チャネルのRFデータに適用することで、各信号を12個の数値から成る“フィンガープリント”に圧縮し、その機体の制御リンクの振る舞いを捉えます。

最良のニューラルネットワークを賢く探索する
こうして得られたコンパクトなフィンガープリントを、著者らは軽量のニューラルネットワークに入力し、6つの人気DJIドローンモデルのどれが信号を発しているかを判定します。重要な革新はネットワークの調整方法にあります。内部設定を手作業で推定したり標準的な勾配降下法だけに頼る代わりに、彼らはレミング(群れを成す小動物)の行動に着想を得た最適化手法を使います。この“人工レミングアルゴリズム”は、候補となるネットワーク群を移動し、トンネルを掘り、採餌し、捕食者から逃げる動物に見立てて、重み設定やネットワークサイズの探索空間を探索します。多くの反復を経て、この過程は分類誤差を最小化する構成に収束し、従来の学習が陥りがちな局所最適解の罠を避けます。
手法の実地検証
研究者らは大規模な実機ドローンRF信号の公開データセットであるDroneRFa上でシステムを評価しました。分類問題を難しくするため、無線ハードウェアが類似する6種類の広く用いられるDJIプラットフォームに注目しました。各信号から1万サンプルを抽出し、4チャネルすべてでマルチスケールエントロピー特徴を算出してこれら12の特徴を最適化ニューラルネットの入力としました。新手法は97.2%の分類精度を達成し、遺伝的アルゴリズム、粒子群最適化、グレイウルフ最適化など異なる最適化手法と組み合わせた複数の一般的な代替手法を約5〜7ポイント上回りました。同様に重要なのは、彼らのシステムが収束速度に優れ、わずか65回の学習反復で90%の精度に到達し、比較的少ないパラメータで動作するためリアルタイムのエッジ展開に適している点です。
雑音の多い世界でも精度を維持する
実環境のRFは混沌としています:Wi‑FiやBluetooth、無数の他デバイスが電波を共有しています。堅牢性を検証するため、著者らは意図的に強い人工雑音をドローン信号に加え、信号対雑音比を段階的に下げて信号強度が雑音と同等になるレベルまで試しました。音声由来の係数、単純なスペクトル、星座図に基づく競合特徴セットはいずれもそのような条件で精度が急落しました。対照的にマルチスケールエントロピー特徴は緩やかに劣化するだけで、最も厳しい雑音レベルでもシステムは90%の正識別率を維持しました。統計解析は、これらの特徴が各ドローン種の内部一貫性を保ちながら種類間の分離をより良く行うことを示しており、これが耐雑音性の理由を説明します。
より安全な空のために意味すること
日常語で言えば、著者らはドローンの隠れた制御リンクに耳を傾け、それを少数の数値に要約し、効率的に調整されたニューラルネットワークでどのモデルが飛んでいるかを特定する“無線フィンガープリンティング”ツールを構築しました。既存手法と比べて、より高精度で学習が速く、控えめなハードウェア上でも動作するほど軽量です。これにより、将来の低高度交通管理システムや空港・国境・重要施設周辺のセキュリティ設置に向けた魅力的な構成要素となります。本研究は6機種を対象としていますが、基本的な考え方――豊かなマルチスケール信号記述と単純なニューラルネットワークの賢い最適化の組み合わせ――はより広いドローン群や他の無線機器にも拡張可能であり、ますます混雑する空への対応力を高め得ます。
引用: Liu, B., Liu, J., Shi, M. et al. Method for classification of UAV flight control RF signals based on multi-scale divergence entropy and optimized neural networks. Sci Rep 16, 8420 (2026). https://doi.org/10.1038/s41598-025-25498-z
キーワード: ドローン検出, 無線周波数信号, ワイヤレスフィンガープリンティング, ニューラルネットワーク最適化, 空域セキュリティ