Clear Sky Science · ja
固定翼無人航空システムにおける機械学習と知能的軌道最適化のための公開ベンチマークデータセット
なぜより賢いドローン飛行が重要なのか
作物調査から捜索救助まで、固定翼ドローンは私たちの頭上で静かに増え続ける仕事を担っています。これらの機体をより信頼性高く、操縦者に依存しないものにすることは、安全な配送、より鋭敏な環境監視、緊急時や紛争地域での強靭な運用といった可能性を開きます。しかし進展を妨げるのは発想の乏しさではなく、現実世界のデータ不足であることが増えています。本稿は、何百回にも及ぶ自律飛行の新しい公開データセットを紹介します。これにより、世界中の技術者や学生が共通の豊富な基盤上で、より賢い飛行アルゴリズムを開発・検証できます。
現実任務のための飛行実験室
著者らは、Volantex Ranger 2400 と呼ばれる堅牢なモーターグライダー型の機体を使ってデータセットを構築しました。翼幅2.5メートル余りの効率的な翼形状とゆったりした胴体により、現代の電子機器を搭載しつつ長時間安定して飛行できます。後部に取り付けられた電動モーターと、短時間の出力よりも耐久性を重視して調整されたカスタムのリチウムイオンバッテリーパックで駆動されます。チームはこの機体を完全自律モードで飛行させ、離陸、直線巡航、急旋回、動的操縦、自動着陸などの主要な飛行フェーズを含む事前計画されたルートを実行しました。この管理されたが現実的な構成により、Ranger は民生・防衛の現場で使われる小型運用ドローンと同様に振る舞う飛行実験室となります。
二つの頭脳、ひとつの機体
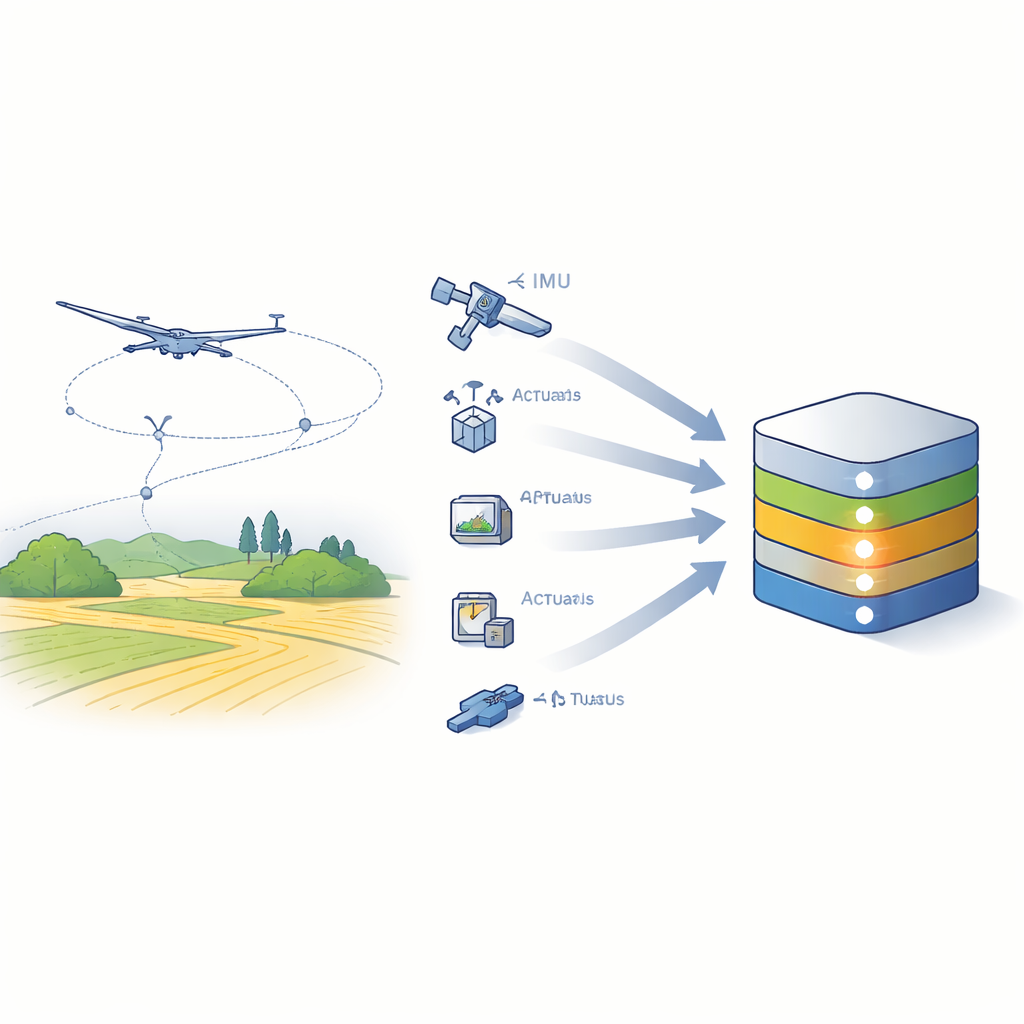
幅広いユースケースを捉えるために、研究者は同一の機体に非常に異なる二つの「頭脳」を搭載しました。一方の構成は、ホビー用途の自作ドローンに使われる電子機器に近い、コンパクトで安価な SpeedyBee F405 フライトコントローラを採用しています。もう一方は、プロフェッショナルな Pixhawk 6X オートパイロットと、高負荷の人工知能ソフトウェアを機内で実行できる強力な Jetson Orin NX コンピュータを組み合わせています。両システムは、慣性センサの動き、GPS位置と速度、高度、対気速度、舵面指令、バッテリーステータス、飛行モードなど、機体の動きを細かく再構築できる頻度で詳細なテレメトリを記録します。機体を一定に保ちつつ電子系を入れ替えることで、搭載計算資源やセンサー性能の違いが飛行挙動に与える影響を研究者が調べられるようにしています。
データセットに含まれるもの
得られた IDF‑DS コレクションは240回の自律飛行、約32時間の飛行時間、数千万の記録サンプルで構成されています。各飛行は一貫したフォルダ構造で保存されており、主要ログ、ミッション計画、コントローラ設定、閲覧可能なGPSトラックを素早く見つけられます。ミッションの一群は長方形フィールド上をジグザグに飛ぶパターンで、反復比較や予測モデルの学習に理想的です。別のミッションは有名なMotoGPのサーキットに触発されたレーストラックのようなループをたどり、急な曲がり、流れるようなカーブ、直線区間がオートパイロットを試します。各構成とミッションについて、ログは計画通りの飛行だけでなく、機体が実際にどのように飛んだかを記録しています。
生の飛行データを洞察に変える
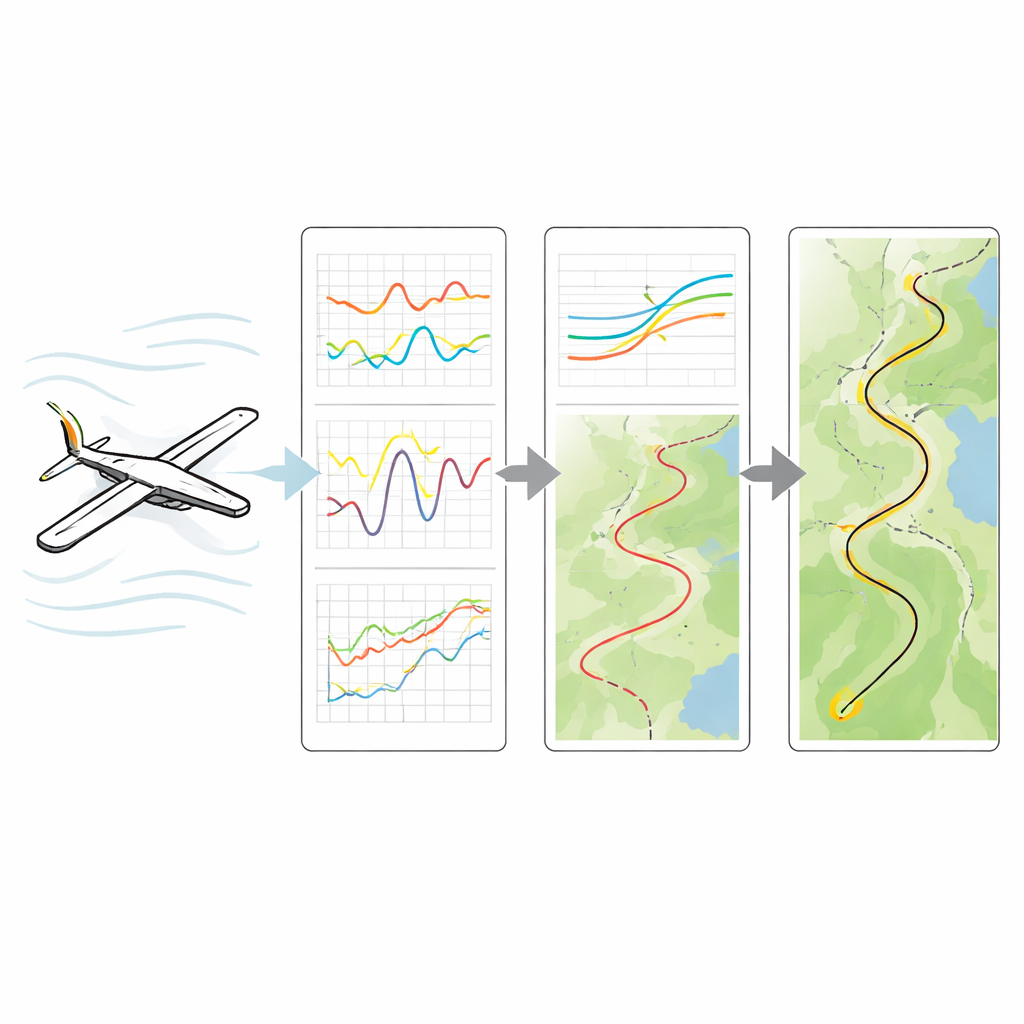
この蓄積で何ができるかを示すため、著者らはいくつかの例示的な解析を行っています。まず、オンボードの動作センサの品質を、GPSベースの軌跡から推定される加速度や角速度と比較して検証し、測定がモデル学習の「グラウンドトゥルース」として十分に信頼できることを確認します。オートパイロットが三方向の速度をどれだけ正確に推定しているか、機体が計画経路にどれだけ沿っているか、上昇・旋回・巡航中にどれだけ電力を消費するかも調べます。対気速度、地上速度、姿勢を組み合わせることで、機体が航路上で経験した風(突風や横風)の様子を、機内計測のみから再構築することさえ可能です。別のユースケースでは、衛星航法が使えない状況で位置を推定する人工知能モデルを同じデータストリームで訓練する方法が概説されています。
将来の飛行に役立つこの資源の意義
日常的な観点では、この研究はコミュニティに対して誰でも開ける「ブラックボックス」を何百回分も提供することに関するものです。各チームが費用のかかるテストデータを自前で集めて秘匿する代わりに、研究者や学生はこの公開データセットをダウンロードしてすぐに、GPSが使えなくなった時の航法方法、危険になる前に故障を検出する方法、より効率的な経路を選んでバッテリー寿命を延ばす方法など、新しいアプローチの探索を始められます。論文自体はこれらのスマートシステムを構築するわけではなく、それらに必要な基盤を構築します。読者への要点は、航空自律性の進展はもはや巧妙なアルゴリズムだけでなく、公開され慎重に文書化された飛行記録に依存するようになっており、このデータセットはその未来への大きな一歩であるということです。
引用: García-Gascón, C., Bas-Bolufer, J., Castelló-Pedrero, P. et al. An open benchmark dataset for machine learning and intelligent trajectory optimization in fixed-wing unmanned aerial systems. Sci Data 13, 364 (2026). https://doi.org/10.1038/s41597-026-06716-3
キーワード: 固定翼ドローン, 飛行テレメトリ, 自律航行, 機械学習データセット, 軌道最適化