Clear Sky Science · ja
SPICE-HL3:高緯度月面景観探査のための単一光子・慣性・ステレオカメラデータセット
なぜ月の影がロボットにとって重要なのか
月の極域への将来のミッションは凍った水などの資源を利用することを期待されていますが、これらの地域は太陽系でも最も視覚的に判別が難しい場所の一つです。長く動く影、まぶしいグレア、ほぼ完全な暗闇はロボットのカメラを容易に惑わせます。本稿はSPICE‑HL3という新しいオープンデータセットを紹介します。屋内に作られた「月の一片」で構築され、世界中の研究者が極めて過酷な極域の視覚・ナビゲーション性能をテストできるようにし、暗闇でも文字通り視認できる最先端の単一光子カメラを含む評価を可能にします。
地上に月極域を再現する
月の極域からの実データは稀少で取得コストが高いため、研究チームはルクセンブルク大学にLunaLabと呼ばれる制御環境テストベッドを構築しました。これは11×8メートルの屋内景観で、粗い玄武岩の砂利、岩、クレーターで覆われ、月面の光を吸収する無気体環境を模すために黒い壁と天井で囲まれています。可動式の強力なスポットライトは、地平線近くにある太陽を模して長く鋭い影と、日照斜面と真っ暗なクレーター内部の間に大きな明るさ差を生み出します。ランプの位置と出力を変えることで、研究者たちは参照、正午、夜明け/夕暮れ、夜間の4つの異なる照明状態を再現し、極域近傍でローバーが一日のうちに経験する照明変化を模擬しました。 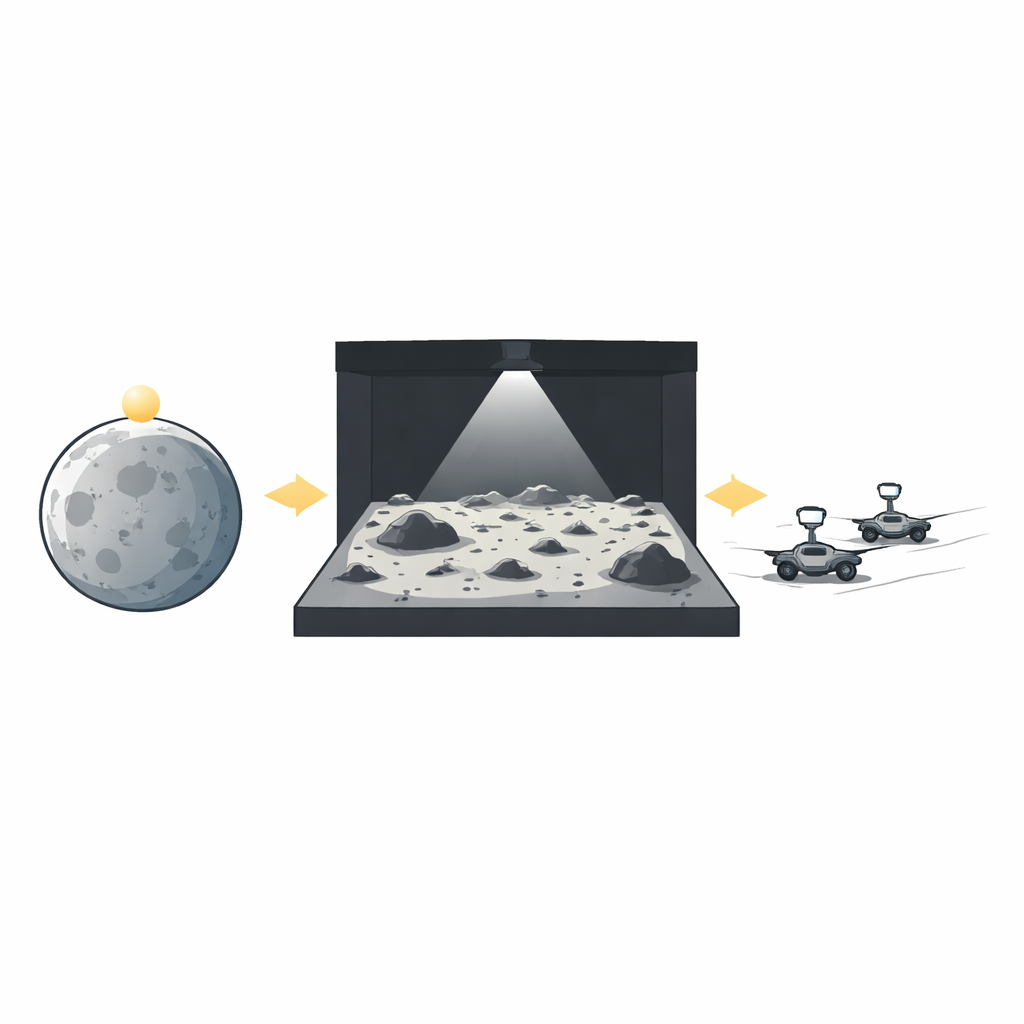
ローバー、センサー、そして単一光子を数えるカメラ
データセットは、異なる組み合わせのカメラと慣性センサーを搭載した2台の小型ホイールローバーを用いて収集されました。片方のローバーには従来型のモノクロカメラと新しい単一光子アバランシェダイオード(SPAD)カメラを搭載し、もう片方にはステレオのカラー+深度カメラと内蔵の慣性センサーを搭載しました。両ローバーは車輪回転と慣性データを記録し、上方のモーションキャプチャシステムがサブミリメートル精度で真の位置を追跡しました。SPADカメラは注目すべき技術です:光を滑らかな強度値として測る代わりに、各画素が個々の光子を検出したかどうかを報告する、非常に高速で感度の高いバイナリ信号を出します。これらの超高速バイナリスナップショットを多数組み合わせることで、従来カメラがぼやけたり飽和しがちな極めて暗い場面や極端なコントラストの場面でもディテールを保った画像を再構成できます。
多様な月面走行の記録
研究者に豊富なテスト環境を提供するため、著者らは7種類のローバー経路を設計しました。慎重な惑星走行を模した長い停止・走行を繰り返す経路から、人工の太陽に対して進行方向が向かう、離れる、横切るといった短い連続走行やその場での急旋回まで含まれます。これらの経路は歩行の遅い速度と10倍の速度で繰り返され、複数の照明条件下で、時にはローバーのヘッドライトを点灯させ、時には消灯した状態で実施されました。合計でSPICE‑HL3は88の時間同期シーケンス、約130万枚の画像、および対応する運動とグラウンドトゥルースデータを含みます。画像は綿密な解析に適した静止シーンから、動きによるブレや露出制御を強く問う高速シーケンスまで網羅しています。すべては明確に整理されたファイル構造にまとめられ、各カメラとセンサーの向きや時刻合わせがどのようになされているかを記述する較正ファイルも含まれます。
単一光子視覚の実地検証
単にデータを公開するだけでなく、チームは記録画像の品質と有用性を検証しました。SPAD、モノクロカメラ、ステレオカメラが最も厳しい視覚状況、つまり薄暮や夜間走行、そしてローバーが直接「太陽」に向かう走行をどのように扱うかを比較しました。単純な画質指標と目視による検査を用いて、単一光子カメラは明るい領域と影の領域の両方で構造を一貫して保持し、広い輝度レンジを維持し、さまざまな条件で安定していることが分かりました。従来型カメラはシーンが十分に照らされている場合は良好に動作しますが、非常に暗い領域では詳細を失うか、光源付近のハイライトを飛ばしてしまうことがありました。著者らはまた、一般的な地図化・自己位置推定ソフトウェアがデータセットを正常に処理できることを確認し、タイムスタンプ、較正、フォーマットが実ロボティクス研究に十分堅牢であることを検証しました。 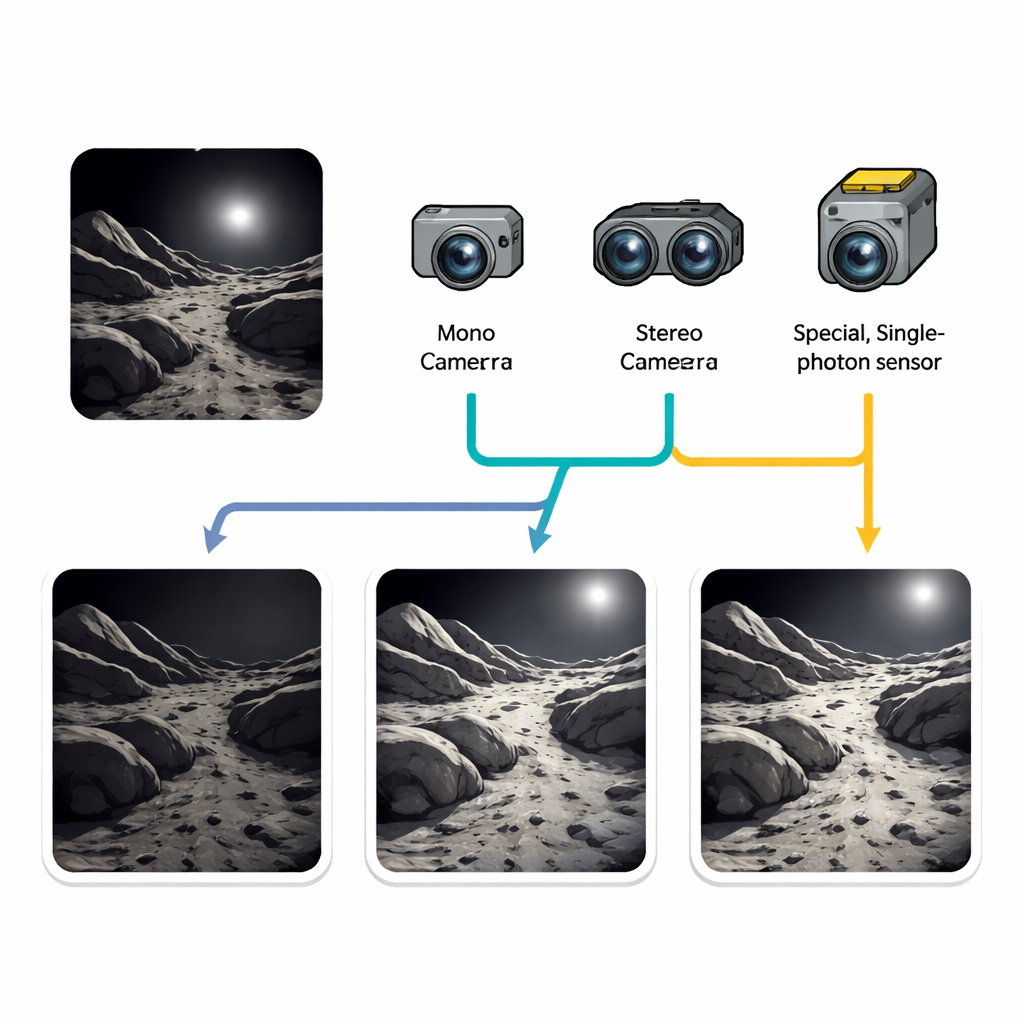
限界、注意点、そして重要性
LunaLabは真の月壌の微細な塵粒子や微妙な光散乱効果を完全に再現できるわけではなく、モーションキャプチャシステムからの意図しない赤外発光が最も暗いシーンに入り込んだこともありましたが、著者らはSPICE‑HL3がローバー視覚にとって要求の厳しい「最悪ケース」的な光学環境を依然として表していると主張しています。月極域へのミッションを準備する技術者や科学者、あるいは任意の薄暗く高コントラストな環境向けにロボットを設計する者にとって、このデータセットは稀有な公開ベンチマークを提供します。これによりSPADセンサーのような新しいカメラ技術を従来システムと公正に比較し、ナビゲーションやマッピングアルゴリズムを改善し、最終的には未来のローバーが変わりゆく月の影の中で身動きがとれなくなるのではなく安全に走行し続けられるようにする手助けとなります。
引用: Rodríguez-Martínez, D., van der Meer, D., Song, J. et al. SPICE-HL3: Single-Photon, Inertial, and Stereo Camera dataset for Exploration of High-Latitude Lunar Landscapes. Sci Data 13, 374 (2026). https://doi.org/10.1038/s41597-026-06668-8
キーワード: 月面ロボティクス, 惑星ナビゲーション, 単一光子イメージング, ロボット視覚データセット, 極端な照明