Clear Sky Science · ja
大規模なコヒーレント4Dイメージングセンサー
四次元で世界を捉える
自動運転車、配送ドローン、拡張現実ヘッドセットはいずれも、周囲の3次元世界をリアルタイムで理解できる機械に依存しています。現在、その種の視覚はしばしばかさばり、高価であったり消費電力が大きかったりします。本論文は「4Dカメラ」への重要な一歩を報告します。すなわち、シーンの形状を3Dでマッピングするだけでなく、物体の動きを測定することができるチップサイズのセンサーであり、ロボットからスマートフォンまでコンパクトな機械視覚をもたらす可能性があります。
平面的な写真から動く地図へ
従来のカメラは平面上の光強度を捉え、美しい2D画像を生成しますが、距離に関する直接的な情報は得られません。これに対して、光検出と測距(LiDAR)システムはレーザーパルスを発し、戻ってくるまでの時間を計測して周囲の3D地図を構築します。既存の方法は遠距離や高解像度で捉えることができますが、可動部や大きな光学系、あるいは点ごとに高いエネルギーを必要とする傾向があります。そのため、スマートフォンのカメラのように小型・低コスト・堅牢でありながら、街路や産業現場、混雑した室内を細部まで安全にスキャンできるものを作るのは難しいのです。
距離と動きを測るチップ
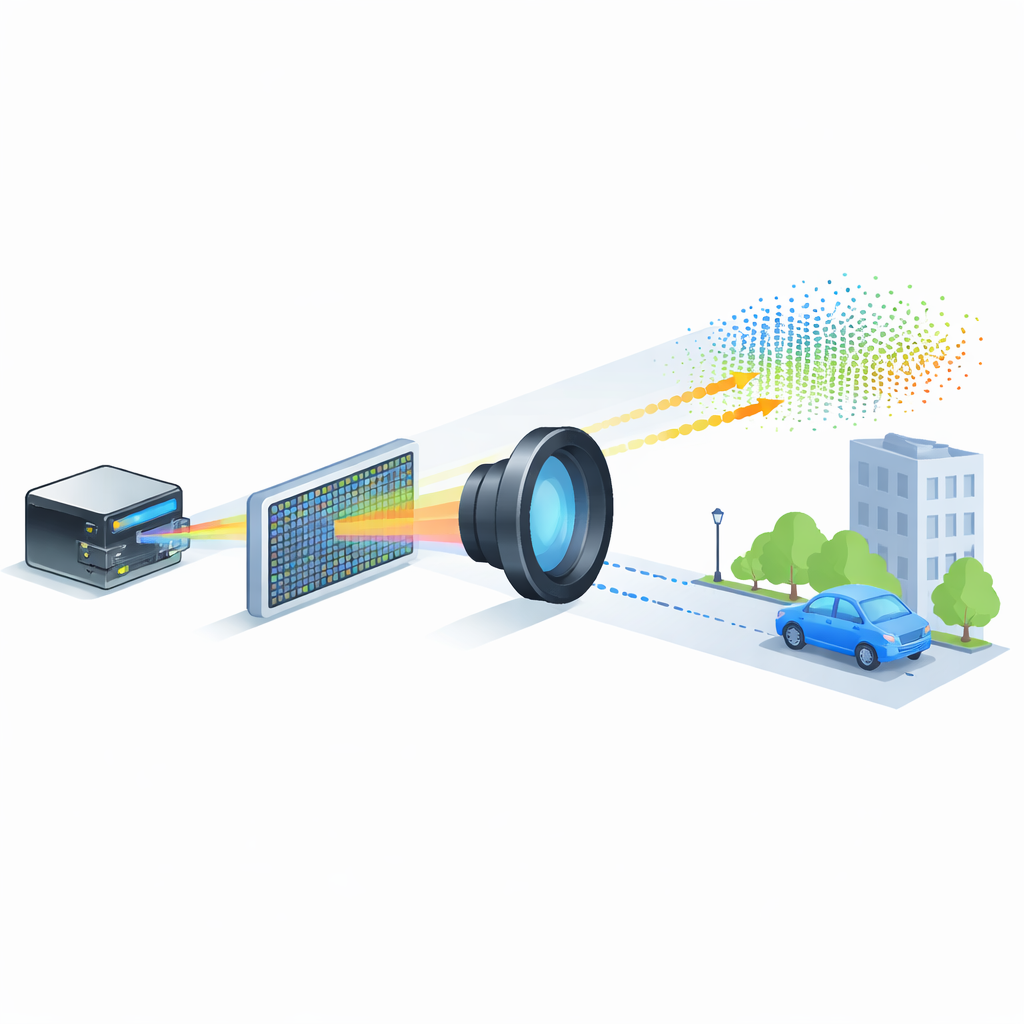
研究者らは新しいタイプのLiDAR焦点面アレイを提示します—本質的にはデジタルカメラ内の撮像チップのLiDAR版です。彼らのデバイスは352×176ピクセル、合計6万点以上のセンシングサイトを持ち、制御電子回路とともに単一のシリコンフォトニクスチップ上に構築されています。短いレーザーパルスを使う代わりに、システムは周波数変調連続波(FMCW)光に依拠しており、レーザーの色(周波数)が制御された“チャープ”で掃引されます。光が物体に反射してチップに戻ると、参照ビームとコヒーレントに結合されます。周波数のわずかな差異から各点の距離と、センサーに向かっているか遠ざかっているかの速度(速度を四次元目として)を同時に明らかにします。
微小な光の格子の仕組み
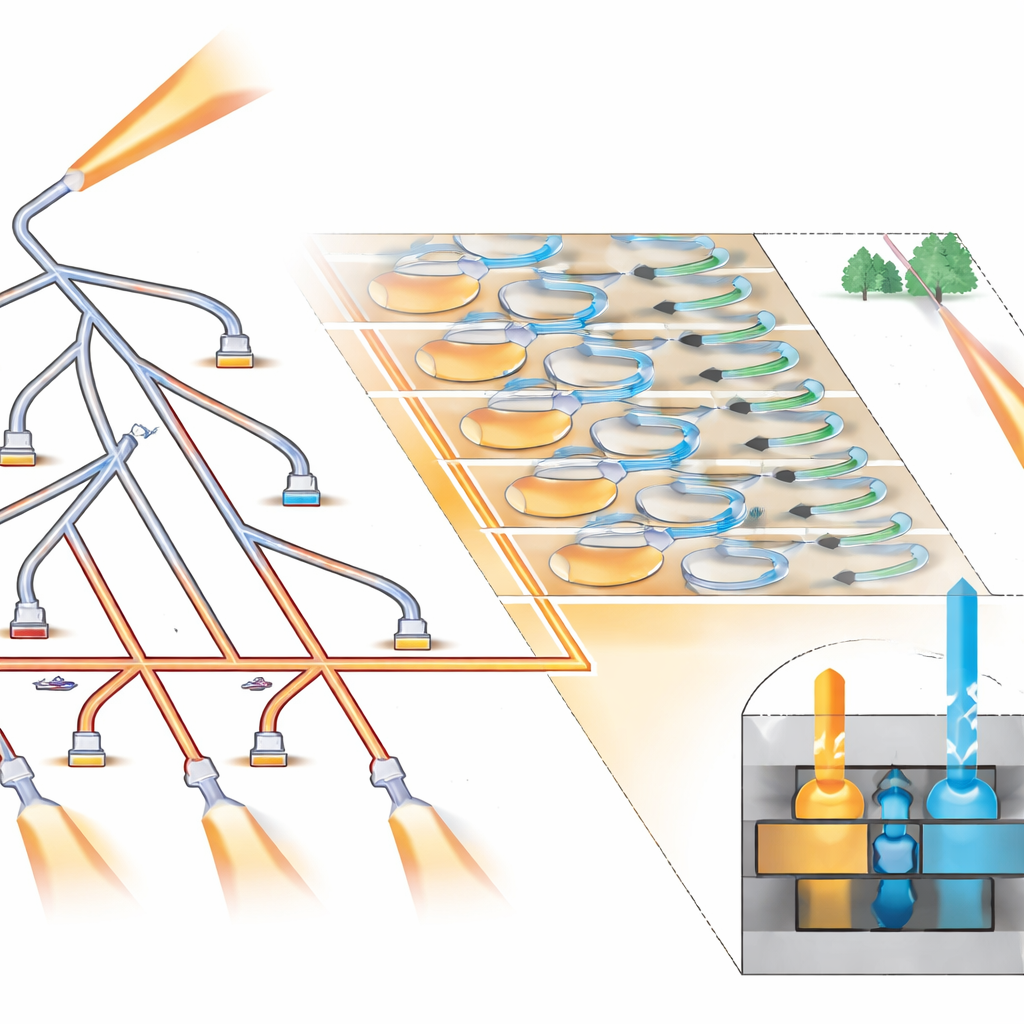
多くのピクセルをカバーしつつ無駄な消費を避けるため、チップはチャープしたレーザー光を微小な光学スイッチのツリーを通してルーティングし、順次周囲の8つのピクセルのグループへ誘導します。各グループ内では光が均等に分配され、8つすべてが同時に送信器兼受信器として動作します。各ピクセルは光を送受信するためのグレーティングカップラーの対、差動検出を行うバランスドフォトディテクターの対、および距離と速度を符号化したビート信号を抽出するオンピクセル増幅器を備えています。チップ上に直接堆積された特別に設計されたマイクロレンズが光の出入りを助け、効率を高めます。同一の開口が送受信を行う(モノスタティック設計)ため、ピクセル間の迷い結合を避けられ、通常のカメラと同様に単一の外部撮像レンズで済みます。
4Dカメラを試験する
汎用品の短波長赤外レンズを用いて、チームはチップを中心としたカメラ状モジュールを構築し、屋内外のシーンの詳細な3D点群を取得しました。1つのレンズで視野は約33×19度、角度分解能は最大0.06度という高い精度を達成し、オフィス内の家具や数十メートル先の建築の特徴を識別できました。システムは4〜65メートルの物体を、点ごとに数十ナノジュールの光学エネルギーとピクセルあたり平均約178マイクロワットの照射電力で測定し、厳しい眼の安全基準内に収めました。また動きの追跡にも成功し、ある実験では回転ディスクの変化する放射速度をミリメートル毎秒の精度で測定しました。
性能、限界、将来の成長
慎重な測定により、センサーの性能は光の量子性が定める基本的な物理限界に近いものの、まだ完全には到達していないことが示されました。現時点での主な制約は各ピクセルの増幅器からの電子ノイズであり、理想的な光子限定検出器と比べて信号対雑音比をやや低下させています。著者らは簡潔な設計改良—主に内部参照光レベルの増加と光学レイアウトの洗練(シリコン–窒化シリコン混合材の活用など)—を示しており、これによりシステムを真のショットノイズ制限領域へ押し込み、実用範囲を200メートル以上へ拡大できる可能性があります。ピクセルアレイから一部のオンチップスイッチを外に移すことも、遠方視野の小さな隙間を除去し、よりクリーンな点群を生成します。
日常的な4Dビジョンへ向けて
この研究は、ピクセル数とレンジの面で多くの実世界アプリケーションが要求する水準に匹敵しつつ、消費電力とサイズを抑えたコンパクトで完全統合された4Dイメージングセンサーを実証しました。発光体、受信素子、ビームステアリング、制御電子回路を単一のシリコンチップに統合することで、本デバイスはデジタル写真におけるCMOSセンサーが果たした役割に似た役割を3Dおよび動きのセンシングに対して果たします。さらなる改良が進めば、こうしたセンサーは自動車、ロボット、携帯電話、ヘッドセットに組み込めるほど安価で堅牢になり、機械に3D世界とその変化を瞬時に正確に理解させることができるようになるでしょう。
引用: Settembrini, F.F., Gungor, A.C., Forrer, A. et al. A large-scale coherent 4D imaging sensor. Nature 651, 364–370 (2026). https://doi.org/10.1038/s41586-026-10183-6
キーワード: LiDAR, 4Dイメージング, シリコンフォトニクス, 自律システム, 深度センシング