Clear Sky Science · ja
インテリジェントロボティクスとインタラクティブシステムのためのマルチモーダル電子皮膚のスケーラブルなインサイチュ製造
ロボットや玩具に触覚を持たせる
熱いトーストの一切れをつぶさずにやさしくつまみ上げたり、火傷させることなく扱えるロボットや、抱きしめ方・耳を曲げる仕方・手のひらの温度によって異なる反応を示す玩具を想像してみてください。本研究は、こうした発想を現実に近づける新しいタイプの「電子皮膚」を提案し、機械により豊かで人間に近い触覚と近傍検知能力を与えます。
なぜ機械はより良い触覚を必要とするか
現代のロボットやガジェットは、現実世界の扱いにおいてまだ不器用なことが多いです。多くは圧力など単一の物理量しか感知できず、手作業で組み立てられたかさばる部品に依存していてスケールさせにくいことが多い。対照的に人間の皮膚は、軽い接触、強い圧力、伸張、温度、接触前の距離感など、多様な信号を同時に統合しています。本研究の著者らは、これら複数の感覚を同時に捉えられ、薄く柔軟で用途に合わせて容易にカスタマイズできる電子版の皮膚を作ることを目指しました。
薄く柔軟な触覚の構築
研究チームはクリーンルームを必要としない工程で、スケール可能かつ迅速に適応できる低プロファイルの「e-スキン」を作成しました。その中核は、紫外線レーザーでパターニングされた柔軟な銅回路で、基板上の配線のように機能しつつ曲げや曲面への追従が可能です。この回路の上下にはスポンジのように多数の気泡を含む軟らかいシリコーン層を積層しました。外表面には薄いカーボンナノチューブ膜がコーティングされ、電気的ノイズから機器を保護するとともにセンサーの共通参照層として働きます。この積層構造により、各センサーパッドは材料が押されたり曲げられたり加熱されたり、物体が近づいたりすることで値が変わる小さな電気容量器のように振る舞います。さらに同じ柔軟回路上に実装された小型チップが温度と非接触距離を測定するため、シート全体で皮膚の圧覚や伸張感覚だけでなく、温かさや近接の感覚も模倣します。 
センサーが圧力と動きを感じる仕組み
e-スキンの圧力および曲げ検出部は、小さな変化に対して敏感に反応しつつ耐久性を保つよう設計されています。何かが押し当てられると、軟らかい層内の気泡が圧縮され、内部の金属層同士の距離が縮まり、空気領域がシリコーンに置き換わります。これらの両方の効果が電気信号を増大させ、とくに材料が圧しやすい低圧域で顕著になります。試験では、e-スキンが数十パスカル程度の非常に軽い触感まで検出でき、応答が速く1万回の押し戻しサイクル後でもドリフトが小さいことが示されました。シートが曲がると内部配線を中心に折りたたまれ、一方の側で層間ギャップが縮んで信号が増加します。応答は大きな曲げ角でより顕著になり、現実の曲げが均等に広がるのではなく局所化する傾向と一致します。全体として、この設計は多くの従来デバイスで使われた複雑な積層構造を用いることなく、柔らかさ、安定性、感度のバランスを実現しています。 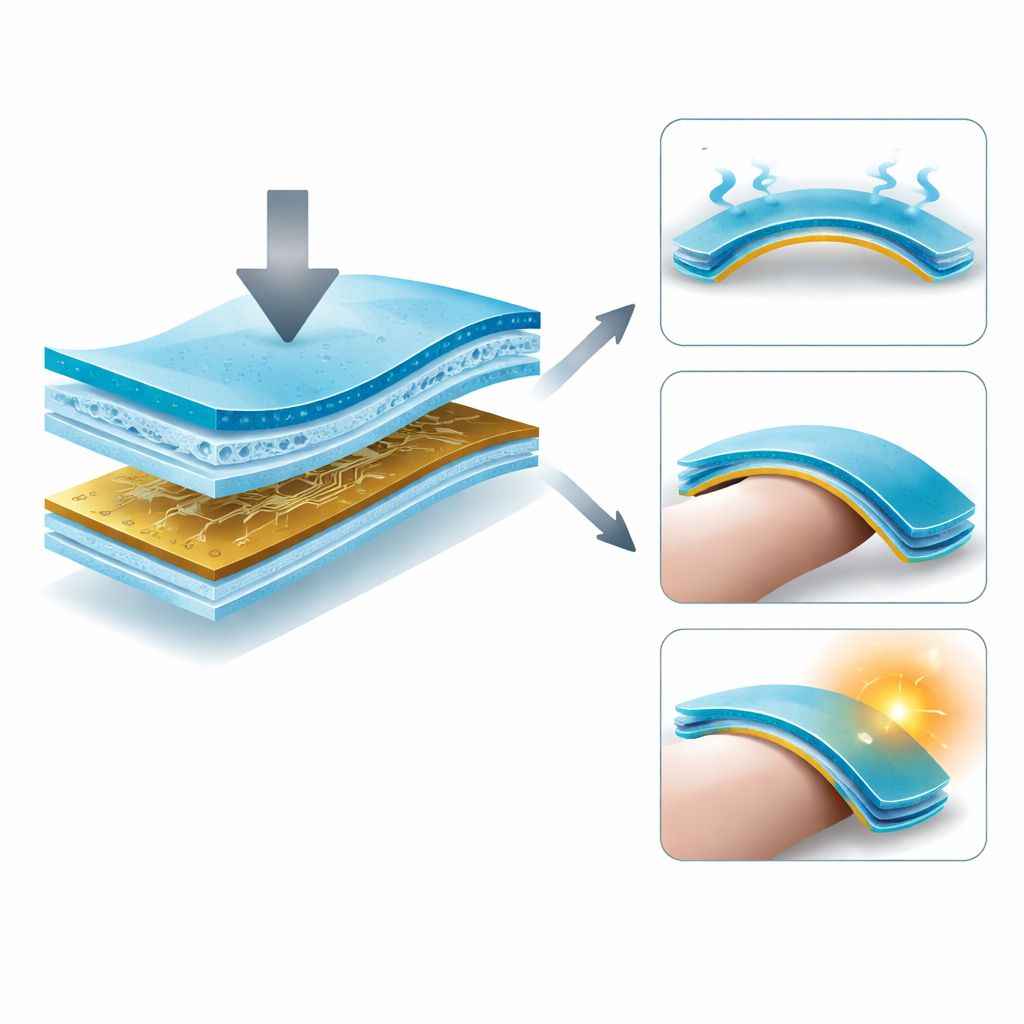
キッチン用ロボットから遊び心ある仲間まで
このe-スキンの応用例として、研究者らはロボットグリッパーにシートを巻き付け、料理風のタスクを与えました。グリッパーが熱いパンに近づくと、皮膚に埋め込まれた小型の深度検知モジュールがまず物体までの距離を測り、触れる前に指の位置合わせを助けます。接触後は圧力と曲げセンサーが握りの強さを制御し、滑りやパンの潰れを防ぎます。同一シート上の温度センサーはパンが人に安全に渡せる程度に冷めたかを確認します。別の例では、チームはe-スキンで覆った柔らかいゾウの玩具を作りました。胸を押すと内蔵の振動モーターのリズムが心拍のように変化し、耳を曲げると音が鳴り、手の温もりで玩具の頬が光るなど、触覚を遊び心と感情的なインタラクションに変換します。
表面全体の圧力パターンを見る
個々のスポットにとどまらず、同じ製造法は大規模な圧力検出アレイを形成し、どこがどれほど強く押されているかを読み取れます。チームは8×15のグリッドを示し、圧力カメラのように動作することを実証しました:指や重り、型押しされた形が押されると、システムは力のパターンを再構成し、文字のような輪郭まで識別します。圧力マップや重心を捉える能力は、ロボットの荷重バランス調整、物体認識、スマート秤やインタラクティブな面としての応用に役立ちます。基礎となる工程が高速かつモジュラーであるため、設計者は用途に合わせてセンシングピクセルの大きさ、間隔、柔らかさを調整できます。スマート家具から姿勢監視マットまで幅広い応用が考えられます。
日常技術への意義
圧力、曲げ、温度、近接という複数のセンシングモードを単一で薄く、容易にカスタマイズ可能なシートに組み合わせることで、本研究は電子皮膚を人間の皮膚の微妙な能力にぐっと近づけます。非常に高い圧力下での性能改善や組立工程の一部自動化の余地は残るものの、このアプローチは既に重く手作業中心のハードウェアを用いずに豊かな触覚をロボットや玩具、その他のデバイスに付加できることを示しています。実用面では、壊れやすい物をより安全に扱える家庭用ロボット、身体接触をより快適に追跡する医療用ウェアラブル、私たちの触れ方により自然に反応するインタラクティブ製品につながる可能性があります。
引用: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
キーワード: 電子皮膚, 触覚センシング, 柔軟センサー, ロボットグリッパー, インタラクティブデバイス