Clear Sky Science · ja
移植可能なバイオハイブリッドシステムのための生物物理を設計した筋神経アクチュエータ
筋肉を「賢い生きた機械」として再構築する
医師が患者自身の筋肉を、決して疲れない生きたモーターに変え、コンピュータで制御でき、繊細な臓器のそばに何年も安全に置けると想像してみてください。本研究はまさにそれを実現する方法を記述しています。研究者たちはラットで「筋神経アクチュエータ」を設計しました。これは神経配線を意図的に組み替え、電子機器で駆動でき、疲労に強く、かつ自然な組織としての振る舞いを保つ筋肉です。このような生きたアクチュエータは、将来的に運動の回復、臓器の補助、進んだ義肢からのリアルな感覚提供などに役立つ可能性があります。
なぜ生きた筋肉がより良いモーターになるのか
電気や空気、流体で動く人工のモーターは強力ですが、重く、体内に適したサイズに小型化しにくく、生体組織と馴染みにくい材料でできています。それに対して骨格筋は軽く、エネルギー効率が高く、自己修復し、すでに体内で働くように設計されています。成長し適応し、微細な神経信号に応答できます。しかし、埋め込みデバイスからの電気刺激で直接制御すると、筋肉はすぐに疲労します。これは標準的な電気刺激が、最大で最速だが耐久性の低い大きな繊維を先に過剰動員してしまうためです。筋肉を信頼できる移植可能なモーターとして利用するには、神経繊維の組織と動員の仕方を変える必要がありました――ただし筋肉本来の健康性と持続性は損なわないように。
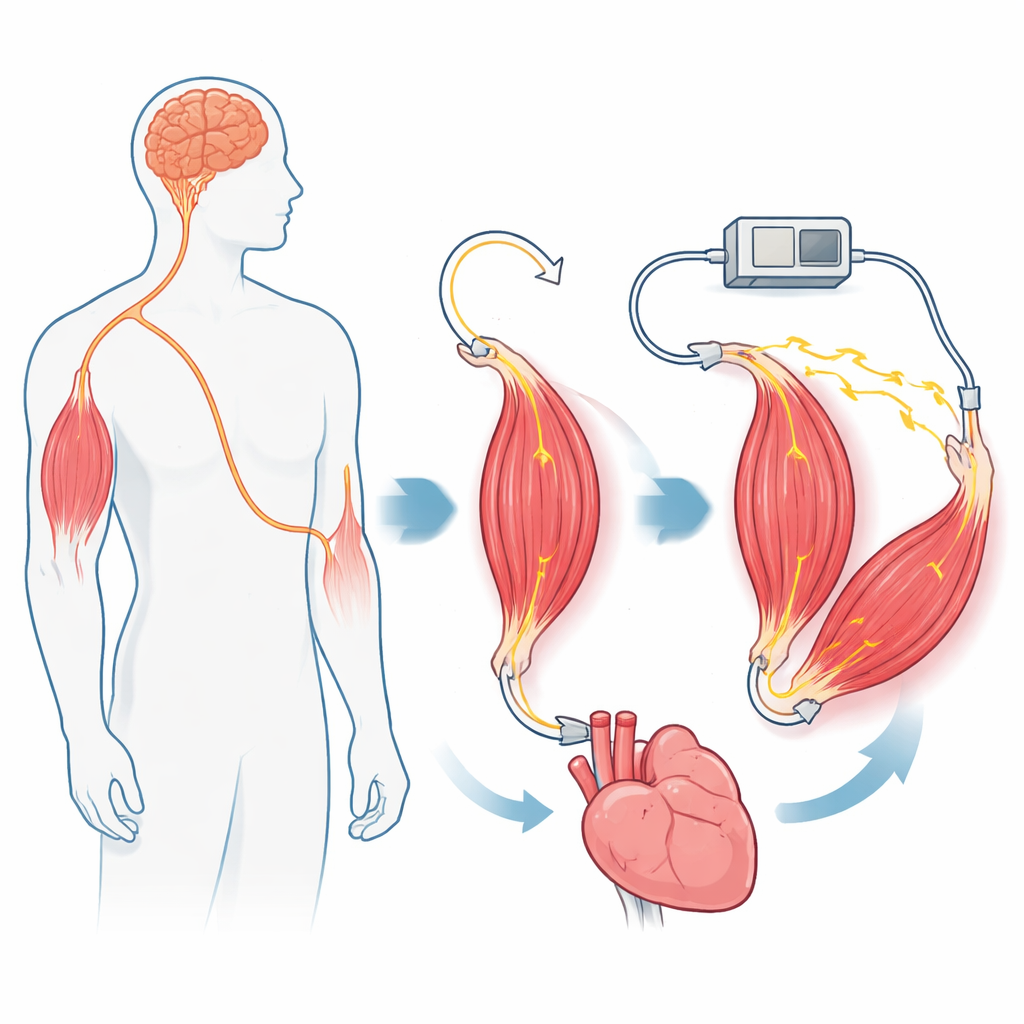
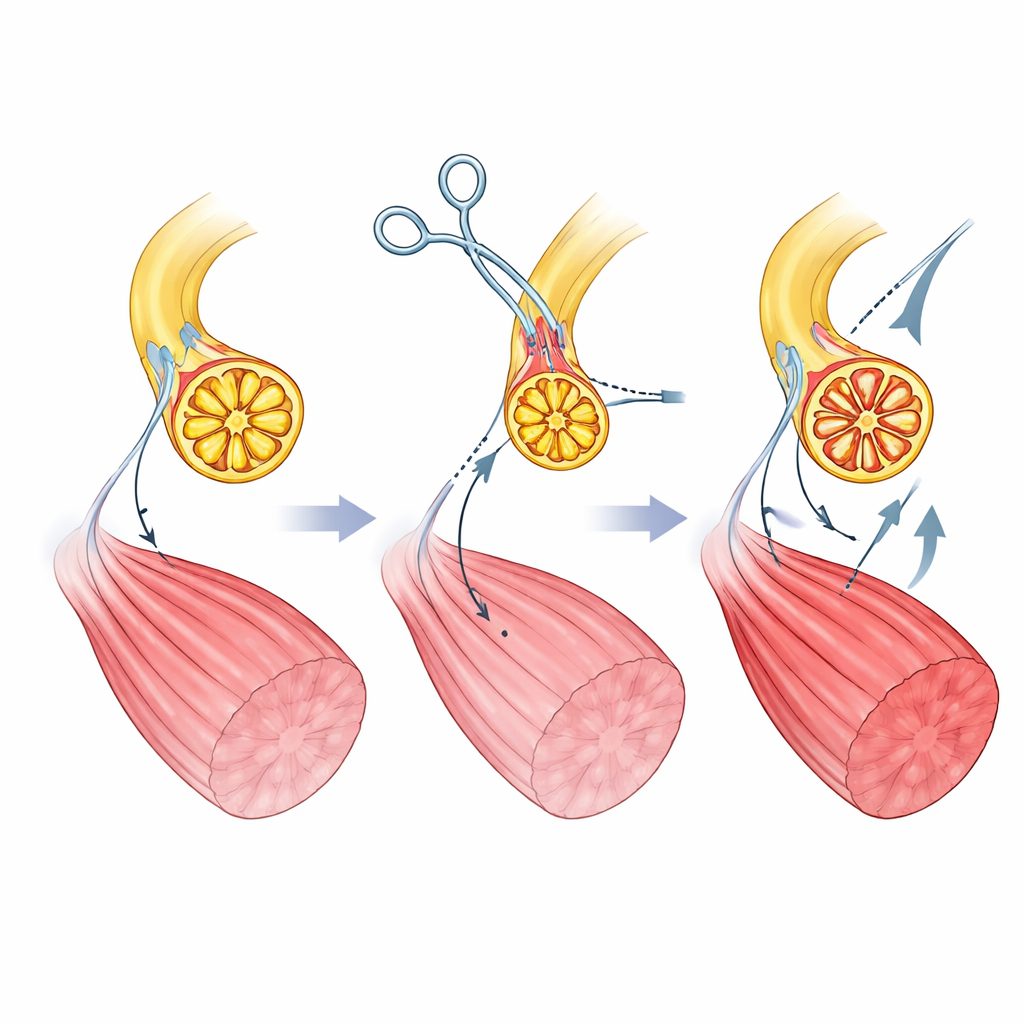
制御を書き換えるための神経経路の置き換え
著者らはラットで大腿筋を外科的に再配線して筋神経アクチュエータを作成しました。まず脊髄からの命令を伝える通常の運動神経を切断し、それが再生して戻らないようにします。次に、通常は皮膚や組織からの触覚や伸張信号を運ぶ別の神経を筋肉に直接導きます。時間とともにこの“感覚”神経は筋内で再生し、筋繊維と新たな接触点を形成します。顕微鏡観察では、これらの新しい接合部は通常の運動接合と類似して見え、感覚神経を電気刺激すると筋肉は収縮能力を取り戻します。重要なのは、この感覚神経の軸索は元の運動神経のものより大きさが均一で小さく、コンピュータ制御下でよりバランスの取れた筋繊維動員を可能にする土台を作る点です。
強く負荷しても働き続ける筋肉
再配線した筋肉が癒えた後、研究チームはそれらを厳しい試験にかけました。単発のツイッチを繰り返すテストや長時間の連続収縮の間で、未改変の筋と新しいアクチュエータを比較しました。筋神経アクチュエータは力を失う速度がはるかに遅く、時間経過でより安定した出力を示し、連続作業下で疲労耐性が260パーセント改善しました。数分単位での挙動は未改変筋と根本的に異なり、急速な力の低下の代わりに力はより緩やかに減少し、その後安定しました。再配線過程で一部の質量を失ったにもかかわらず、アクチュエータは健康的な線維構造を保ち、単位質量当たりの出力は元の筋と類似しており、追加の運動や刺激なしでも少なくとも15週間にわたり状態を維持しました。
脳を乱さずに行うコンピュータ制御
新しい神経配線は筋肉を脳の通常の運動信号から切り離すため、すべての収縮は外部刺激器から生じます。研究者たちは筋肉をフィードバックループに組み込みました:センサーが力を測り、コントローラーが神経刺激を調整し、システムは多数のサイクルにわたって選ばれた目標力を追従します。この設定では未改変筋はすぐに失敗しますが、筋神経アクチュエータは指令信号に従い続けます。システムをより安全で柔軟にするために、チームは可逆的な“神経ブロック”も導入しました。脊髄に近い側の神経に高周波の電気信号をかけることで、刺激パルスが中枢神経系へ不要な信号を送り返すのを防ぎつつ、筋側は反応を続けられるようにします。試験では、脳が事実上人工刺激から隔離されている間もアクチュエータは制御された力を発生し続けました。
義肢から衰弱した臓器の補助まで
この生きたモーターの応用例を示すために、著者らはラットで二つのデモシステムを構築しました。第一のシステムでは、アクチュエータを切断部位に残った筋肉を模した別の筋と直列に結合しました。この対を締めたり緩めたりすることで残存筋の伸張が変わり、それに伴ってその感覚神経繊維の活動が変化します――本質的には四肢の位置や力の感覚を上げ下げする操作です。この「固有受容性機械神経インターフェース」は将来、ロボット義肢や仮想アバターから自然に感じられるフィードバックを提供できる可能性があります。第二のシステムでは、液体で満たした小腸の一ループにアクチュエータを巻きつけました。神経刺激で駆動すると筋肉は腸管を絞り、放し、動きの追跡では臓器がアクチュエータに同期して動くことが示されました。これは将来、腸、膀胱、あるいは心臓のような力の弱まった臓器に機械的な強さを付与するデバイスの可能性を示唆します。
将来の医療にとっての意義
総じて、本研究は神経を慎重に迂回させることで、患者自身の筋肉を疲労に強く、コンピュータ駆動可能でありながら自然組織として振る舞い、必要に応じて脳から電気的に絶縁できるアクチュエータへと変えうることを示しています。手術手技や電極の多くは既存の臨床ツールと類似しているため、完全な合成インプラントや培養組織よりも実用化への移行が容易かもしれません。同様の筋神経アクチュエータが人間で安全に構築・制御できれば、四肢の感覚回復、臓器の支援、従来の機械のような嵩張りや硬さを伴わない精密な機械的刺激の提供など、新しいバイオハイブリッドシステムの中核となり得ます。
引用: Song, H., Herrera-Arcos, G., Friedman, G.N. et al. A myoneural actuator with engineered biophysics for implantable biohybrid systems. Nat Commun 17, 2584 (2026). https://doi.org/10.1038/s41467-026-70626-6
キーワード: バイオハイブリッドアクチュエータ, ニューロプロステティクス, 筋疲労, 神経再生, 臓器サポート