Clear Sky Science · ja
リラクソロフェレクトリックポリマーナノコンポジットから作られた生体模倣アクチュエータ
本物の昆虫のように動く小さなロボット
芋虫ほどの大きさで荒れた地形を這い回れるロボットや、蝶のように羽ばたいて離陸する装置を想像してみてください。しかも、それが一枚の紙のように薄いプラスチックから作られ、LEDのナイトライトよりも少ない電力で動くとしたら。本稿は、人工筋肉のように振る舞える新しい柔らかい材料について述べており、こうした昆虫サイズのロボットをこれまでよりもシンプルに、軽く、エネルギー効率よくする可能性を示します。
なぜ小さく柔らかな機械が重要なのか
昆虫に触発された小型ロボットは、倒壊した建物内で生存者を探したり、配管内をくぐり抜けてインフラを点検したり、作物や森林を静かに監視したりできます。こうした窮屈で予測できない空間で働くには、極めて小さく柔軟で頑丈であり、かつ非常に少ない電力で動かなければなりません。多くの現在の設計は歯車やヒンジ、複数材料の複雑な組立てに頼っており、これが重量を増し、エネルギーを浪費し、さらに小型化しにくくしています。著者らは、理想的な解は一つの材料が運動を生み出しそれを直接伝達できることであり、これは動物の筋肉が行うことに近いと主張します。
内部から設計されたスマートプラスチック
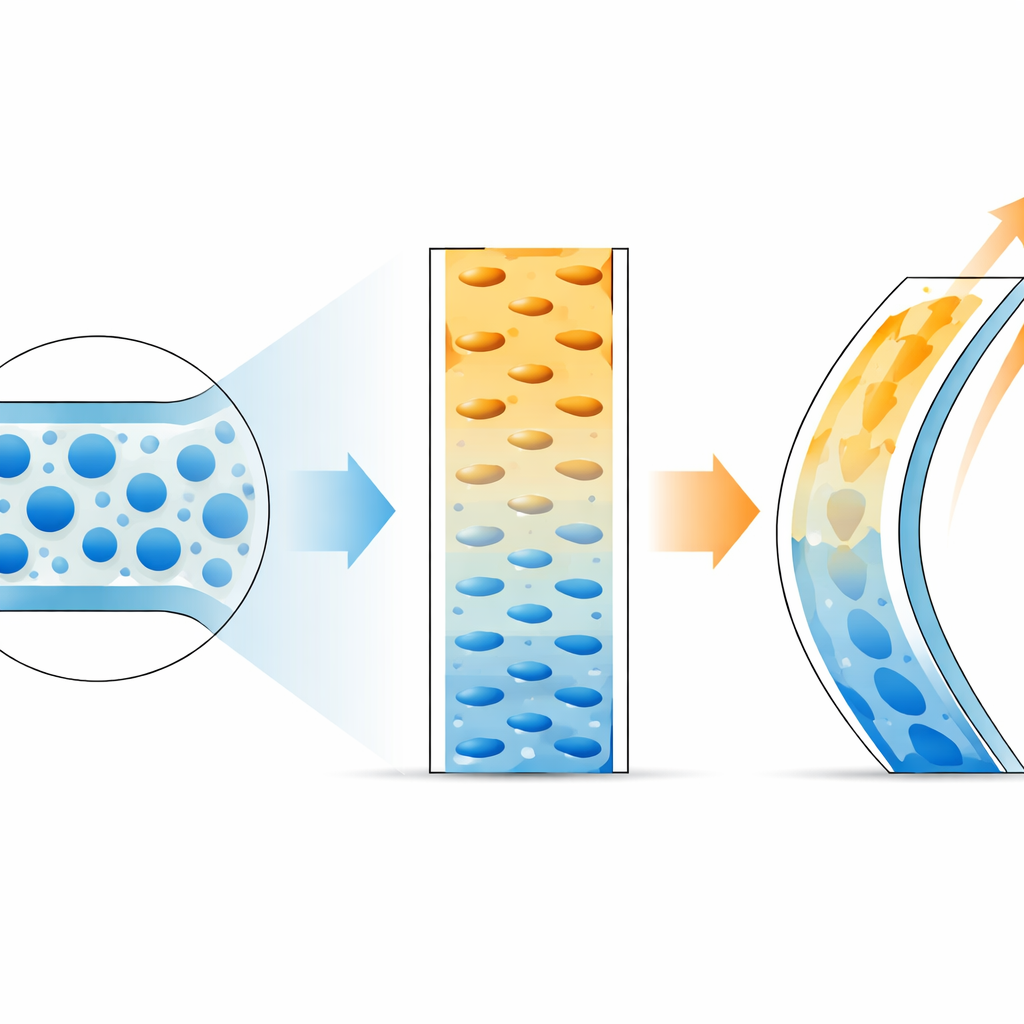
この研究の中心は、PVDFと呼ばれるよく知られた材料群に基づく薄いプラスチックフィルムです。PVDFは電場にさらされると変形する性質で評価されています。研究者たちはこのプラスチックに微小な「ポリマードット」、すなわち水素結合を形成する化学基を覆ったナノメートルスケールの粒子を混ぜます。混合物をフィルムにして制御された方法でやさしく加熱すると、溶媒は上層よりも下層から速く蒸発します。この不均一な乾燥と水素結合が相まって、底面近くのプラスチック鎖が高度に整列し極性のある配列をとるよう促し、上層はそれほど秩序化されません。その結果、単一層の厚さ方向に内部の勾配が組み込まれます。
隠れた構造が生む強力な動き
この微妙な構造勾配は大きな機械的効果をもたらします。フィルムに電場がかかると、より秩序化され強く分極した底側領域が上側より大きく応答し、シートの一方が他方よりも大きく伸びます。その不均衡により全体のストリップが曲がり、サーモスタットの二金属板に似た挙動を示しますが、ここでは厚さが数十マイクロメートルしかない全有機の柔軟なフィルムで起こります。精密な測定により、このフィルムは長さを最大約14パーセント変化させ、硬いセラミックアクチュエータに匹敵する機械的エネルギー密度を蓄えられることが示されました──それでいて柔らかく軽量です。ポリマードットや勾配処理のない同等のフィルムと比べ、新材料は数倍のひずみを生み、電気エネルギーを運動に変換する効率が格段に高くなっています。
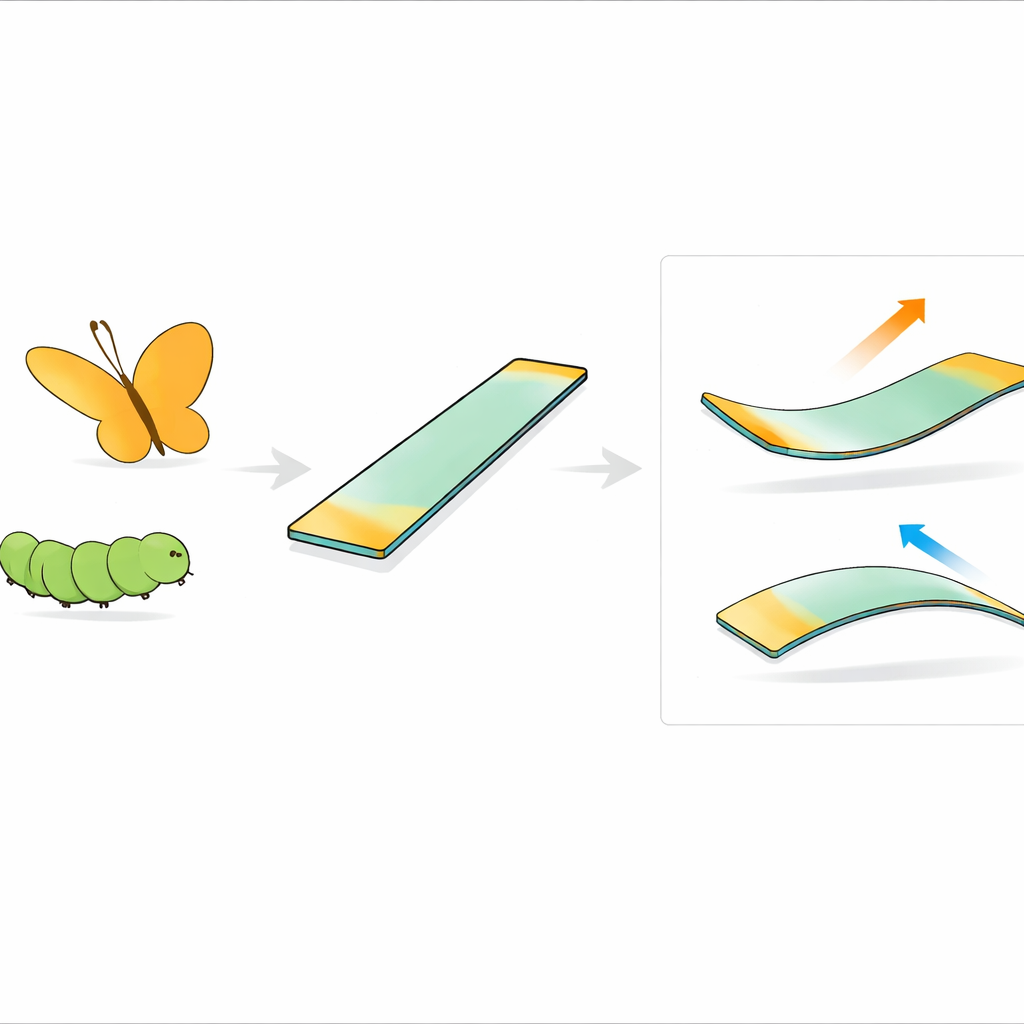
這う芋虫と羽ばたく蝶の製作
この材料が実際に何ができるかを示すために、チームはフィルムを昆虫のような形に切り、単純な炭素ベースの電極と薄い銅製の支持具を付けます。ある設計は中央が広く両端が細くなる小さな芋虫に似ており、交流電場をかけるとストリップがリズミカルに曲がって畝のあるトラックを毎秒数体長の速度で這い進み、消費電力は数ミリワットにすぎません。別の設計は中央に能動領域があり柔軟な羽を持つ蝶を模しており、類似の電気信号で羽が速く羽ばたいて装置をプラットフォームから数ミリ持ち上げ、自己重量の最大20倍の荷重を運ぶこともできます──いずれもアクチュエータの総質量は約50ミリグラムです。
将来の小型ロボットへの意義
この研究は、プラスチック材料の片面から反対面へと組織化の仕方を精密に設計することで、電場下で強く曲がる単一の超薄シートを作り、複雑で生命らしい動きを駆動できることを示しています。現状のデバイスは依然として比較的高い電圧を必要としますが、極めて低い消費電力と羽のように軽い構造は、将来の昆虫サイズのロボットやスマートデバイスの有望な構成要素となります。動作電圧を下げるためのさらなる改良が進めば、同様のフィルムはいつか髪の毛ほどの厚さの人工筋肉だけで群れをなして這い、羽ばたき、世界を探検する小型自律機械群を実現するかもしれません。
引用: Chi, H., Bai, P., Zhou, Z. et al. Biomimetic actuator crafted from a relaxor ferroelectric polymer nanocomposite. Nat Commun 17, 2155 (2026). https://doi.org/10.1038/s41467-026-70165-0
キーワード: ソフトロボティクス, 人工筋肉, ポリマーアクチュエータ, 昆虫スケールロボット, 電気活性材料