Clear Sky Science · ja
閉ループの人間・機械相互作用のために分離された多モーダルセンシングを持つ自己発電型ハイドロゲル電子皮膚
日常に馴染むスマートな第二の皮膚
肌の一層のように柔らかく伸縮するリストバンドが、静かに体温、脈拍、発汗を追跡するとともにロボットを制御し、その触感を感じさせる──本論文はまさにそんな“電子皮膚”を、水分を多く含むゲルから作り出したことを報告する。装置は体の熱と動きから自家発電し、複数の生体信号を同時に受け取り、人工知能を用いてそれらの信号の混同を防ぐことで、人と機械のより自然な結びつきを可能にする。
柔らかなゲルをセンシングする皮膚へ変える
システムの中心はポリビニルアルコール(PVA)ハイドロゲルの一片で、80%以上が水分で実際の皮膚に近い柔らかさを持つゼリー状材料だ。研究者らは慎重な三段階の溶媒置換プロセスを用いて、このゲルに強さと柔軟性の両立を与えた。まず、ポリマー溶液を凍結・融解させて基礎的なゲルを形成した。次に元の液相をグリセロールに置き換えてポリマー鎖をより緊密に詰め、材料を強靭化した。最後に鉄イオンを含む塩水溶液に置換し、ネットワークをわずかに緩めて剛性を人体組織の範囲まで下げつつ、ゲルの靭性と伸張性は保った。顕微鏡観察、熱試験、X線測定により、ゲルは強度のための微小な結晶様領域を維持しつつ、全体構造は柔軟で弾性を保っていることが確かめられた。
1つの材料で3種類の触覚を
皮膚のように振る舞うには、ハイドロゲルがかさばる別個のセンサー群なしで異なる刺激を感知しなければならない。研究チームは材料と形状を工夫し、同じゲル片内で干渉せずに3つの異なるイオンベースの効果が起きるように設計した。体と空気との温度差は鉄イオンの可逆反応を通じて微小だが持続的な電流を駆動し、熱を電気に変換する。ゲルが押されるか伸ばされると正負のイオンが異なる速度で移動して一時的に電荷のバランスが崩れ、圧力駆動の電流が生じる。一方、汗中の塩分は親水処理されたチャネルを通ってゲルに移行し、塩濃度の差が別の測定可能な電流を生み出す。これらのプロセスは反応時間や方向が異なるため、熱・圧力・塩分の信号は共存しつつも分離して取り出せる。
信号を強めるためのゲル形状設計
研究者らは、ハイドロゲルを微細なプリズムの森のように彫刻することで感度、特に圧力感度が劇的に向上することを発見した。この設計では、狭い先端が皮膚接触部に機械的応力を集中させ、作用力の方向に沿ってイオンを分極させることで、単純なブロック形状と比べて電流を百倍以上に増幅する。同じ構造は熱の伝導やイオンの拡散も妨げないため、3つのセンシングモードは同時に作動する。試験では、この電子皮膚は元の長さの8倍以上まで伸び、非常に軽い圧力を検出でき、手首の脈波を血圧解析で用いられる異なるピークまで識別できる十分な解像度で捉えた。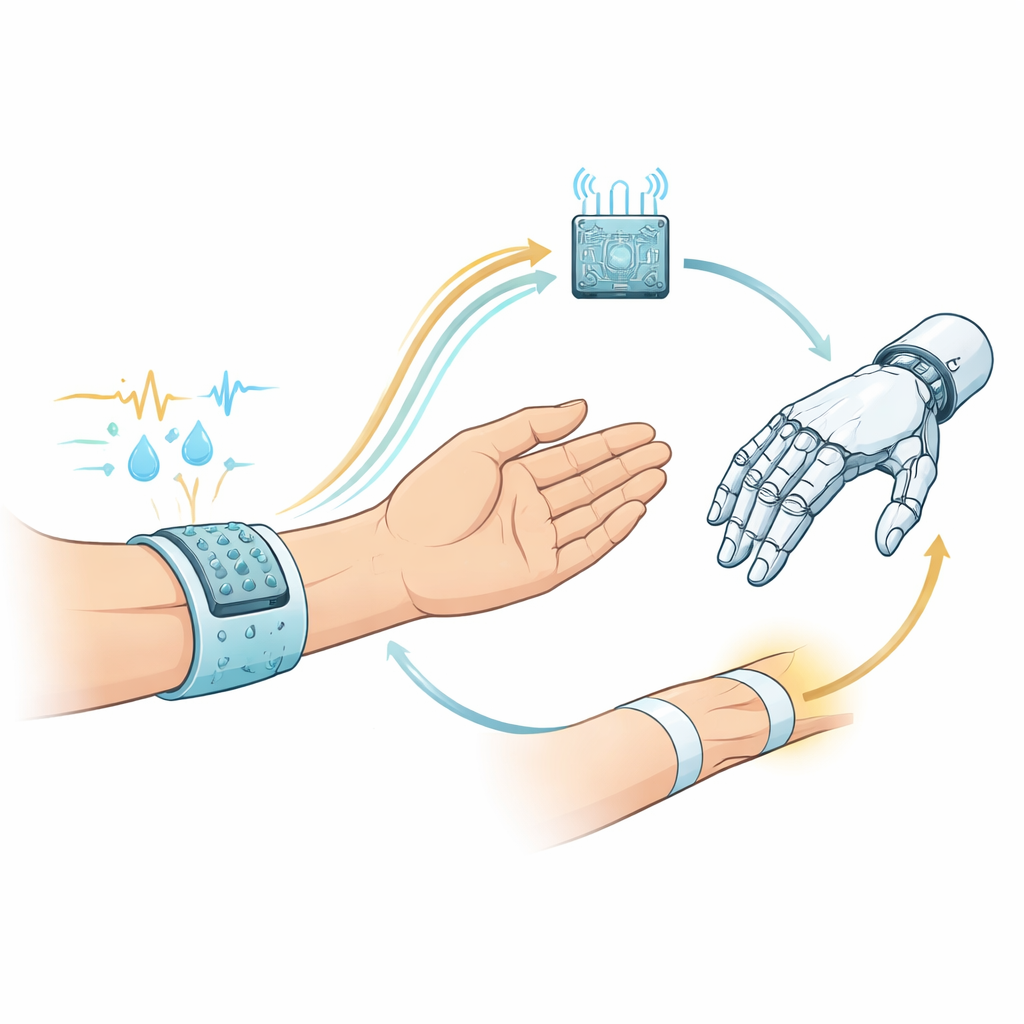
信号からスマートなリストバンドへ
この材料を基に、著者らはハイドロゲルセンサーアレイとフレキシブル回路、信号再現ユニット、無線通信を組み合わせて能動的な多モーダル信号発生リストバンドを制作した。難しい点は、3つのセンシングモードが重なり合う電流を生み出すことだ。これらをリアルタイムで分離するために、チームは注意機構を備えた長短期記憶(LSTM)ネットワークに基づく機械学習モデルを訓練した。このアルゴリズムは電流の時間発展を学習し、それを温度・圧力・汗に割り当てる。安静、歩行、ランニング、睡眠、発熱といった日常状態を模したテストでは、復号された読み値は市販の温度計、心拍モニター、汗分析装置と良く一致した。同じリストバンドは、手のジェスチャー時の前腕筋の微妙な圧力変化も検出でき、深層学習による分類器を用いれば高精度でロボットアームの制御コマンドに翻訳できた。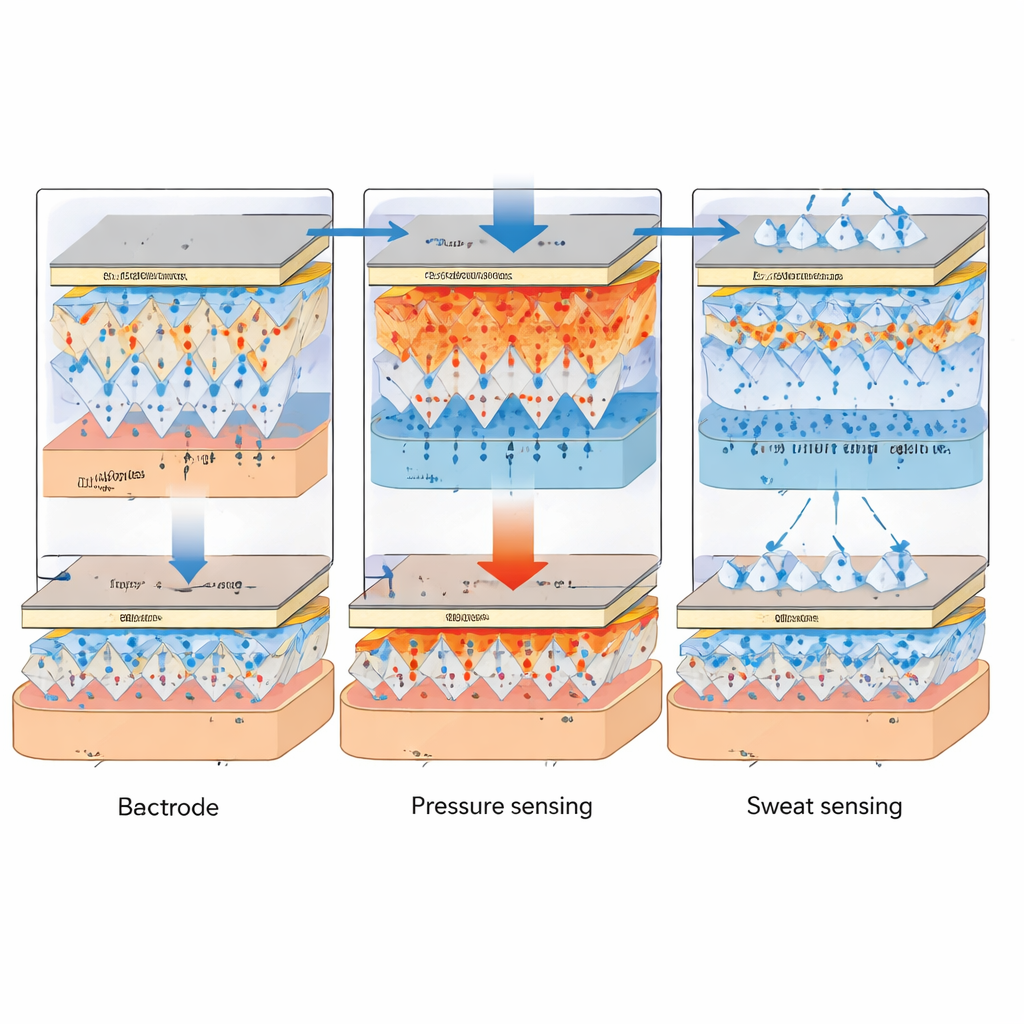
ロボットの触覚を通じて感じる
このシステムは一方向の制御を超えて感覚ループを閉じる。ハイドロゲル電子皮膚の別個のコピーをロボットの手に装着すると、ロボットが物体を扱う際の温度や把持力を検知する。その信号は使用者のリストバンドに送られ、小型のヒーターと振動モータを駆動する。結果として使用者は、距離があってもロボットの経験を反映した温かさ、冷たさ、圧力を感じ取ることができる。ソフトウェアに組み込まれた安全機能は危険なほど高温・低温の表面を警告したり、繊細な物品が潰されるのを防いだりできる。一般向けの要点は、単一の皮膚様材料が体のエネルギーを収穫し、複数のバイタルサインを同時に読み取り、機械との双方向の触覚コミュニケーションを支援できるようになったことであり、これは将来の義肢、ソフトロボット、より自然で生き生きした仮想世界への道を示しているということだ。
引用: Bai, C., Dong, X., Liu, Q. et al. A self-powered hydrogel electronic skin with decoupled multimodal sensing for closed-loop human-machine interactions. Nat Commun 17, 2675 (2026). https://doi.org/10.1038/s41467-026-69450-9
キーワード: 電子皮膚, ハイドロゲルセンサー, ウェアラブル健康モニタリング, ヒューマン・マシン・インターフェース, ハプティックフィードバック