Clear Sky Science · ja
末梢神経内記録からの幻肢運動の解読
失われた脚で新しい動き方を
膝上で脚を失った人にとって、義足で歩くことは自分の体の一部を動かす感覚というよりも硬い機械を操縦するように感じられることが多い。本研究は別の道を探る:切断した人が“幻肢”を動かそうとしたときに残された脚の神経を直接聞き、その信号を将来のバイオニック脚の制御に使うというものだ。かつて脳が膝、足首、つま先を動かすために使っていた配線にアクセスすることで、人工の脚を自然で直感的に制御する道が開ける可能性を示している。
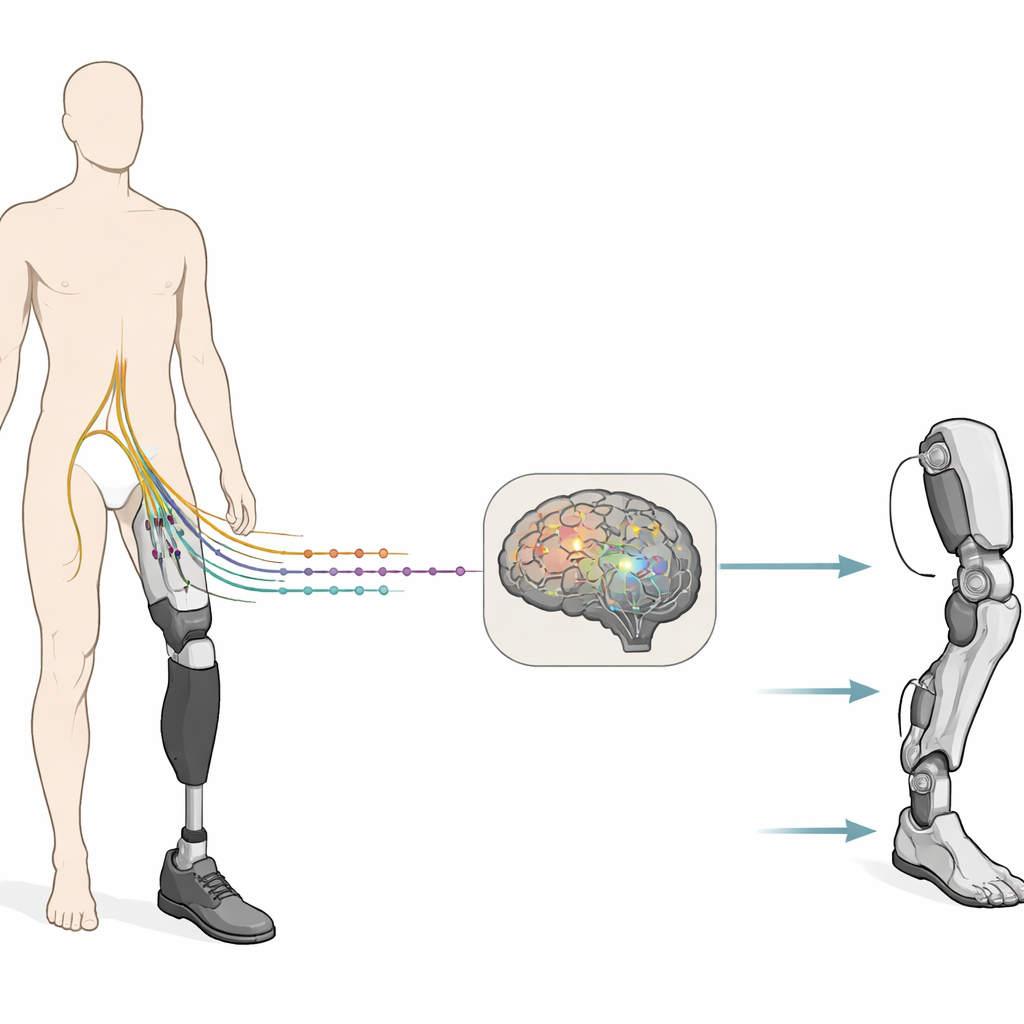
大腿部内の神経に耳を傾ける
研究チームは、膝上で脚を失ったが幻肢を鮮明に感じ“動かす”ことができる2名の協力者と共に作業した。外科医はハムストリングにある坐骨神経の枝内に髪の毛ほどの細さの電極ストリップを4本埋め込んだ。各ストリップには複数の微小な記録サイトがあり、合計56チャネルを提供した。参加者が座った状態で指示に従って幻肢の膝、足首、またはつま先を屈曲・伸展しようとすると、電極は切断によって失われた筋肉をかつて支配していた神経線維からの電気活動の断続を捉えた。
幽霊の動きが残す実際の電気的痕跡
脚の下部はなくても、それを動かそうとする試みは神経内に明瞭で構造化された信号を生じさせた。多くの記録サイトは少なくとも1種類の動作に反応し、屈曲と伸展を区別するものも多かった。電極の中には膝の動きにより敏感なもの、足首やつま先により敏感なものがあり、異なる筋群が神経にどのように配線されているかを反映していた。神経発火パターンの強度とタイミングは関節ごとに異なり、残された神経断端に身体の元々の脚制御の“地図”が保持されていることを示唆する。研究者らはまた、これらの運動パターンが既知の解剖とよく一致していることを見いだした:特定の動作で反応する神経チャネルは、その動作を通常生み出す筋肉に対応している傾向があった。
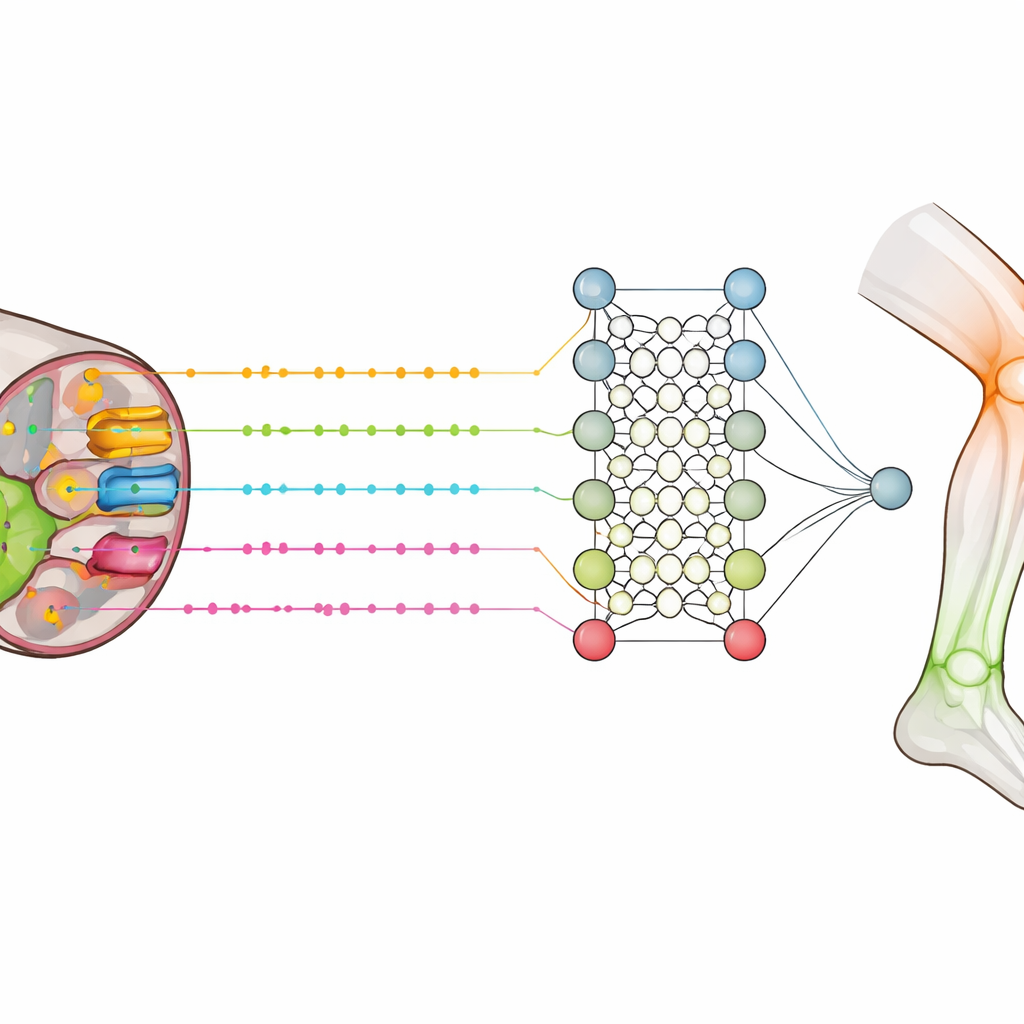
脳に着想を得たデコーダを教える
神経活動を取得することは物語の半分に過ぎない。将来の義肢はそれらの複雑な信号を素早く命令に変換しなければならない。科学者たちはスパイキングニューラルネットワーク、すなわち実際のニューロンのように短い電気パルスで通信するタイプの人工ネットワークに目を向けた。彼らはまず生の神経記録を、信号のパワーが時間とともにどのように変化するかを強調する密なスパイク列に変換した。これらのスパイク列を小型のデコーダに入力し、足首の屈曲や膝の伸展などの運動“クラス”に分類することを学習させた。標準的な機械学習ツールと比べて、スパイキングデコーダはより正確で効率的であり、短い神経活動の断片から複数の意図された動作を信頼して認識した。
神経信号と筋電信号の組み合わせ
電極は大腿の筋肉の間に位置していたため、低周波数帯域の小さな筋電信号も拾っていた。記録をフィルタ処理することで、筋様の活動をより速い神経スパイクから分離できた。デコーダを筋電信号のみで訓練すると、高周波の神経データのみを使う場合に比べて性能が改善した。さらに最良だったのは両方の情報源――神経と残存筋――を組み合わせたときで、特に膝や足首の動作で精度が一層向上した。これは単一の埋め込み型技術が神経トラフィックと残存筋活動の両方にアクセスし、より豊かで安定したロボット脚の制御信号を提供できることを示唆する。
脚を動かしながら地面を感じる
発信側の運動命令を“聞く”同じ末梢神経内電極は逆方向にも使える:小さな電気パルスを神経に送り感覚を呼び起こすことだ。これらの協力者を用いた先行研究では、これらのインプラントを通した刺激により足底やつま先に触覚のような感覚が生じた。本研究では、運動に関連する記録と触覚に関連する感覚がどこで重なるかをマッピングした。大腿部レベルでは運動と感覚のための神経繊維は概ね分離していたことが分かり、設計者が一部の接点を主に運動デコード用に、他の接点を主に感覚フィードバック用に割り当てることで両者の干渉を減らせる可能性がある。
将来のバイオニック脚にとっての意義
一般読者にとっての核心的なメッセージは、切断から何年経っていても失われた脚を動かす“配線”は依然として活動して読み取れるということだ。細い電極を残された神経内に設置し、脳に着想を得たアルゴリズムで信号を解釈することで、切断者が幻肢の膝を曲げようとしているのか、足首を動かそうとしているのか、つま先を丸めようとしているのかを瞬時に識別することが可能になる。足の欠損から触覚を回復する電気刺激と組み合わせれば、このアプローチは自然な肢のように感じ、動く義足を実現しうる。研究はまだ初期の実験室段階であり、オフラインで2人のみを対象に試験されたにすぎないが、神経系に直接接続する将来の義肢のための重要な基礎を築き、より直感的な制御、優れたバランス感覚、強い身体性の感覚を提供する可能性を示している。
引用: Rossi, C., Bumbasirevic, M., Čvančara, P. et al. Decoding phantom limb movements from intraneural recordings. Nat Commun 17, 2511 (2026). https://doi.org/10.1038/s41467-026-69297-0
キーワード: 幻肢, ニューロプロスセティクス, 末梢神経インターフェース, スパイキングニューラルネットワーク, 下肢切断