Clear Sky Science · ja
空中で把持・相互作用する手のような自律飛行ロボット
ほとんど握手できそうな飛行ヘルパー
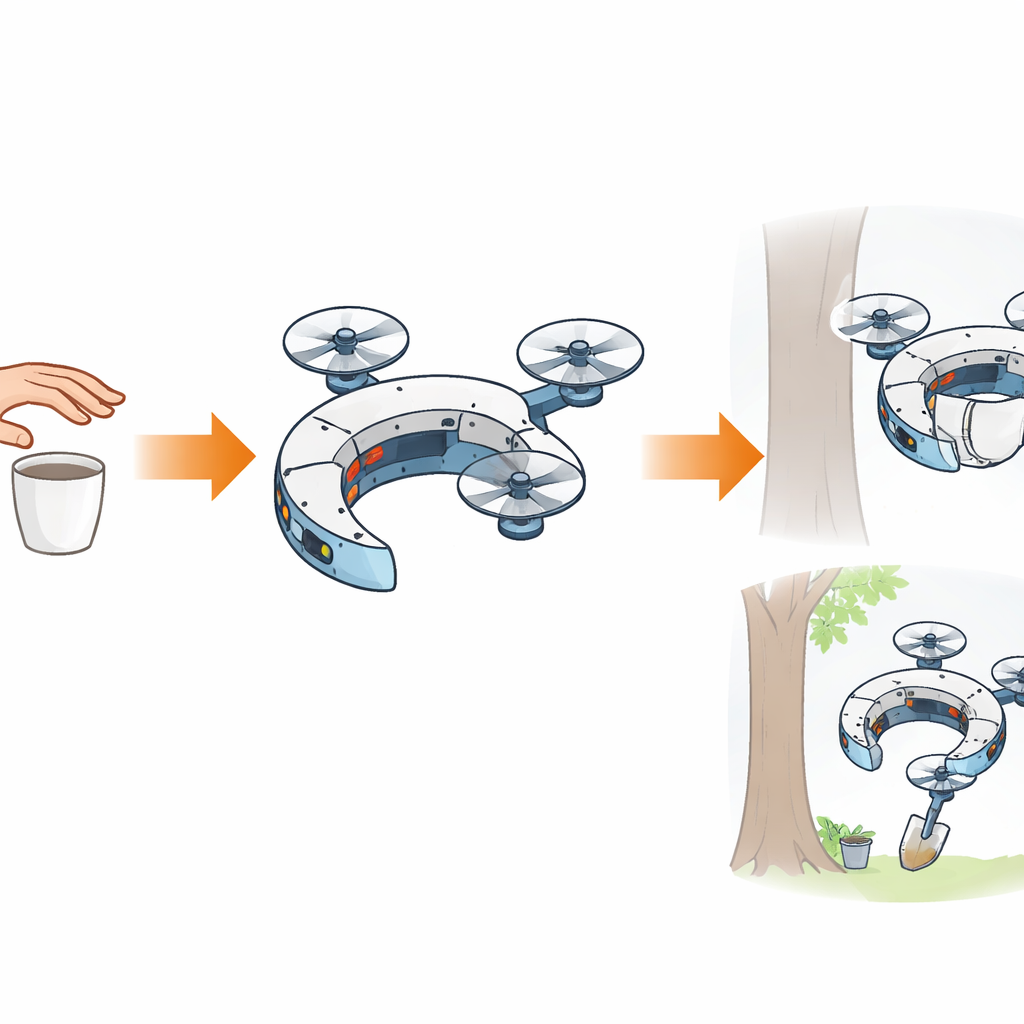
小型の飛行ロボットが、周囲を撮影するだけでなく、ドアを開けたり、飲み物を手渡したり、届きにくい棚から荷物をつまみ出したりできると想像してみてください。本研究はまさにそのような装置を紹介します:本体自体が“手”として機能するコンパクトなドローンです。鳥の飛行と人間の把持の考えを融合させることで、研究者たちは空中ロボットが受動的な観察者を越えて、家庭、工場、捜索救助の現場で能動的な補助者になりうることを示しています。
飛ぶカメラから飛ぶ手へ
現在の多くのドローンは写真撮影、マッピング、点検に使われる「飛ぶ目」です。ドローンに物をつかんだり押したりするためのアームを付けようとすると、機体はすぐにかさばり、重く、電力を消費し、特に屋内や人の近くでは制御が難しくなります。著者らはこの問題に対し、外付けのアームを取り付けるのではなく、ドローンの本体そのものを再設計することで取り組みます。別個のアームを付ける代わりに、機体全体を物体を包み込んだり、柱や木に止まったりできる“手”のように設計しつつ、狭い空間を機敏に飛べるようにしています。
手の形をした飛行体
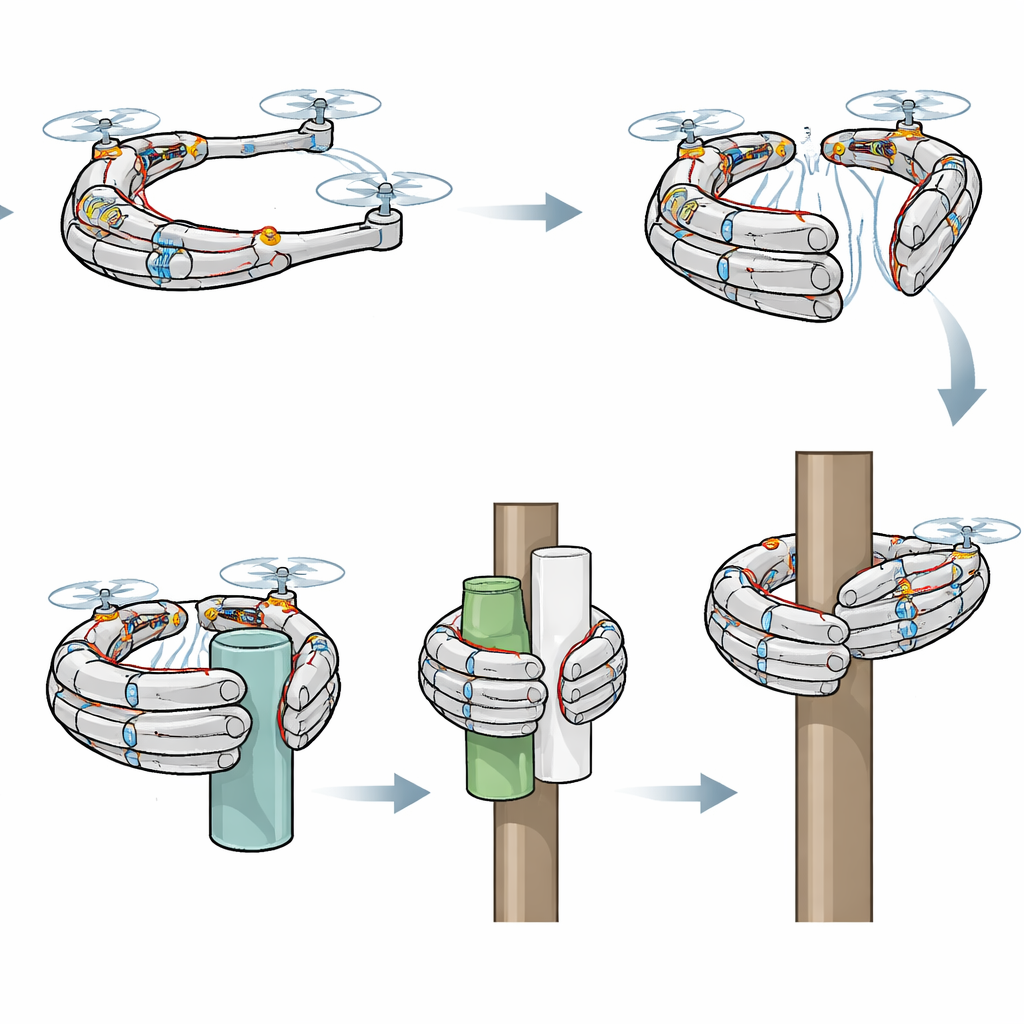
新しいロボット、HI‑ARMは成人の手の大きさと重さほどです。フレームは曲がった掌と指を思わせる開いたC字形を形成しています。このリングの内部には伸縮するセグメントと捻れる関節があり、多数のモーターではなく、一本の腱のようなコードを一つのサーボで引くことで駆動します。バネにより構造は曲がりつつ元の形に戻り、筋肉や腱のようにエネルギーを蓄え放出します。このアンダーアクチュエート(低駆動)設計により、コードが締まると異なる部分が圧縮・捩れして、把持対象に自然に適合するよう自己調整できます。
ロボットの思考と飛行の仕組み
この変形する本体を実用にするため、チームは多層の「脳」を構築しました。一部はドローンがどこへ飛び、いつ把持・開放・止まり(パーチ)を行うかを計画し、「つかむ」「放す」「柱に止まる」などの基本行動のライブラリを参照します。別の部分はこれらの計画をリアルタイムでドローンが辿れる滑らかな軌道に変換します。高速な制御系はロボットの位置、変形に伴う重心の変化、物を持ち上げたり押したりしたときに生じる追加の力を常に推定します。適応アルゴリズムはこれらの乱れを感知し、4つのプロペラの推力を自動的に増強・再配分して、ボディが瓶を握ったりドアを押したりしている間も飛行を安定させます。
この飛ぶ手ができること
屋内試験でHI‑ARMは人間らしい身近な動作を行います。「掌」を使って満タンの水のボトルを把持して正確な飛行経路で運び、「指先」で薄いナプキンをつまんで持ち上げます—機械にとって特に繊細な作業です。同じ機構は玩具、箱、袋、形が不規則なブロックなどにも、形状を事前に知らなくても適応します。ロボットは木の幹や柱に飛び寄ってそれを挟み、プロペラを止めてそのままぶら下がることができ、ホバリングよりずっと少ない消費電力で持続できます。また、ドアに近づいてノブに巻きつき、押し返しの力があっても自らのバランスを保ちながらドアを開けることができます。
人を助け、屋外で働く
研究者たちはこの装置が人とどのように相互作用できるかも検討します。家庭のような場面では、ドローンが人の手から小包を受け取り片付け、テーブルから飲み物を取って手渡し、後で空になったボトルを回収し、最後にコート掛けに止まって次の作業を待つ—すべてを連続して滑らかに行います。映像ゴーグルと片手用の簡単なコントローラーを使えば、運動機能が制限された人が屋外のコーヒーカップを遠隔でつかませて数十メートル移動させるよう誘導できます。屋外試験では、ドローンが竹や柱に止まり、体を縮めて狭い岩の隙間を抜け、飲み物を川を渡って運ぶなど、配達、点検、救助での役割を示唆しています。
日常生活への意味
この研究は、小さな手の形をした飛行ロボットが、機敏な飛行と驚くほど人間らしい把持、止まり、物や人との相互作用を組み合わせられることを示しています。ボディ設計、運動計画、適応制御を密接に統合することで、従来の空中操作ロボットを制約してきたサイズや安定性の多くの問題を克服しました。将来の機体は完全自律的に動くためにより優れたオンボード視覚や高度な意思決定を必要としますが、本研究は「飛ぶ手」が荷物を届けたり、障害を持つ人を支援したり、インフラを保守したり、人が届きにくい危険な場所で繊細な作業を行ったりする未来を指し示しています。
引用: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
キーワード: 空中操作, 飛行するロボットハンド, ドローン, 人間とロボットの相互作用, 生体模倣ロボティクス