Clear Sky Science · ja
昆虫サイズの人工視覚・嗅覚バイオニック複眼
小さな一つのパッケージに収まったロボットの目と鼻
ロボット昆虫が、自分の進む先を見渡すだけでなく、空中にある危険なガスを「嗅ぐ」こともできる──しかも実際のハエの眼ほどの大きさの装置で。この記事はまさにそのような創作を報告します:視覚と嗅覚を一体化した極小の人工複眼で、超軽量のセンサーに収められています。ショウジョウバエなどの昆虫の工夫を借用することで、研究者たちは将来のドローンや小型ロボットが、非常に少ない電力で複雑かつ危険な環境を素早く安全に航行できる可能性を示しています。

自然が技術者に教えたこと
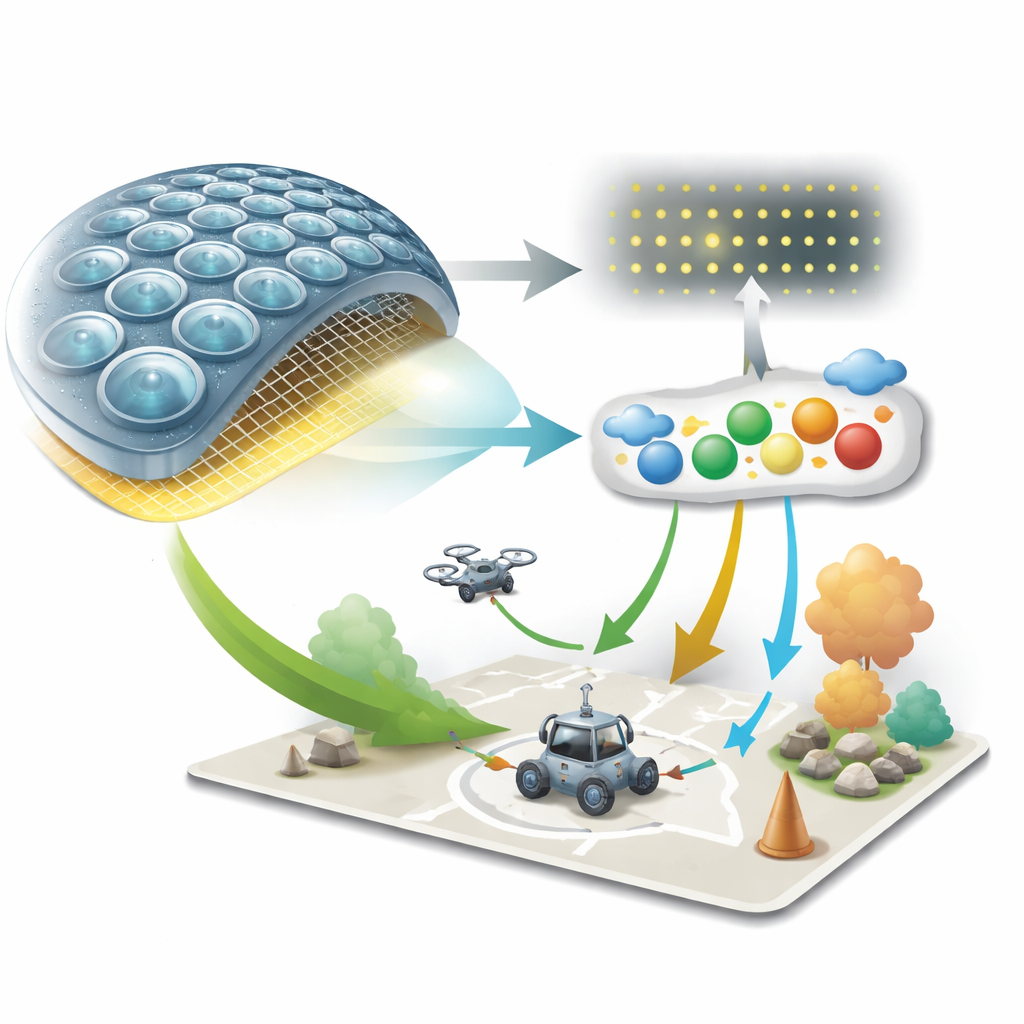
ショウジョウバエのような昆虫は、多数の小さなレンズが詰まったドーム状の複眼を使って広い視野の動きを感知し、捕食者や障害物をかわします。同時に触角は鋭い嗅覚を提供し、空中の食物や配偶者、あるいは脅威を検知します。これら二つの情報は昆虫の脳で統合され、素早い判断を導きます。著者らはこの二重感覚をハードウェアで再現することを目指しました:ハエの眼を模した広角の動作検出を行い、化学的な“鼻”を統合して周囲の空気を読み取り、両方の信号を融合してより賢い振る舞いを実現する、単一の昆虫サイズの装置です。
本当に機能する小さな曲面眼の構築
チームは小さな昆虫の頭ほどの大きさの円筒状人工眼を作り、1.5ミリ角の正方形に1,027個の小さなレンズを詰め込みました。超高精度の3D印刷技術を用い、曲面マイクロレンズアレイを有機光検出層の柔軟な層に直接印刷しました。各レンズは単一の検出器に対応し、個々の“ピクセル”として各方向を向くオマティディウムに似た構造を形成します。レンズは受容角が狭く設計され、一方向からの光が隣接ピクセルに漏れないようにしており、実際の複眼に見られる光学的分離を忠実に模倣しています。霧や湿気に対処するため、研究者たちはレンズ間に微小な毛状構造を追加し、表面での水滴の凝結を防ぐようにしました。これは実際の昆虫の眼を取り巻く自己清浄毛に似ています。
動きを見て、空気をリアルタイムで感知する
レンズの下には、有機半導体と硫化鉛量子ドットの混合物から作られた特別に設計された光感受層があります。この組合せにより装置は紫外から可視、近赤外までの光を検出でき、応答時間は約1万分の1秒と高速で、約1,000フレーム/秒のちらつき融合速度に相当します。装置は鮮明で詳細な画像を形成するのではなく、広い視野にわたる明るさの変化を記録し、単純な数学モデルで物体の位置、概ねの距離、運動を推定します。並行して、インクジェット印刷された比色アレイが人工の鼻の役割を果たします:金属錯体やpH感受性色素を含む微小スポットが特定の有害ガスにさらされると変色します。軽量でハエに触発されたハッシュアルゴリズムがこれらの色の変化をガスの種類と大まかな濃度に変換し、10種類の一般的な有毒蒸気に対して約93%の精度を示しました。
実験室から走行ロボットやドローンへ
この昆虫サイズの“目と鼻”が実地で役立つことを示すため、研究者たちはそれを二つの小型無人プラットフォームに搭載しました。全方向に動ける車輪付きロボットでは、曲面眼が水平180度の視野を監視でき、接近する障害物を回避できるだけの速さで動きを検出しました。昆虫の逃避行動に触発されたシンプルなハードウェア実装のルールにより、ロボットは近づく物体から後退したり、巡航しながらそれらを回避したりできました。小型ドローンでは、同じ装置が3次元で動く光源の位置を追跡し、ガスセンサーと組み合わせて、光源や有害化学物質のプルームがある試験環境内を自律的に探索させました。視覚と嗅覚の情報が統合され、ドローンは標的を追いながら空間中の危険なガスをマッピングできました。
なぜ小型機にとって重要なのか
この研究は、実物の昆虫の眼ほどのサイズのセンサーに広角で高速な視覚と化学センシングを両立させることが可能であることを示しています。本装置は細かな画像情報を犠牲にする代わりに、動き感度、広帯域の波長対応、エネルギー効率を重視しています。これらは電力や計算資源が限られた小型ドローンやロボットにとって重要なトレードオフです。“目”と“鼻”を一つのコンパクトなシステムで統合し、昆虫の脳に学んだ融合戦略を採ることで、本研究は障害物を回避し、危険なガスを認識し、飛翔昆虫のような敏捷性で複雑な環境を探査する低コスト・小型の自律機群の実現を示唆しています。
引用: Wang, J., Wei, S., Qin, N. et al. An insect-scale artificial visual-olfactory bionic compound eye. Nat Commun 17, 2259 (2026). https://doi.org/10.1038/s41467-026-68940-0
キーワード: バイオニック複眼, 生体模倣ロボティクス, マルチモーダルセンシング, マイクロビジョンシステム, 有害ガス検知