Clear Sky Science · ja
推力による低重力効果で跳躍を強化したロボット:正確で予測可能、かつ延長されたジャンプを実現
月面にいるかのように跳べるロボット
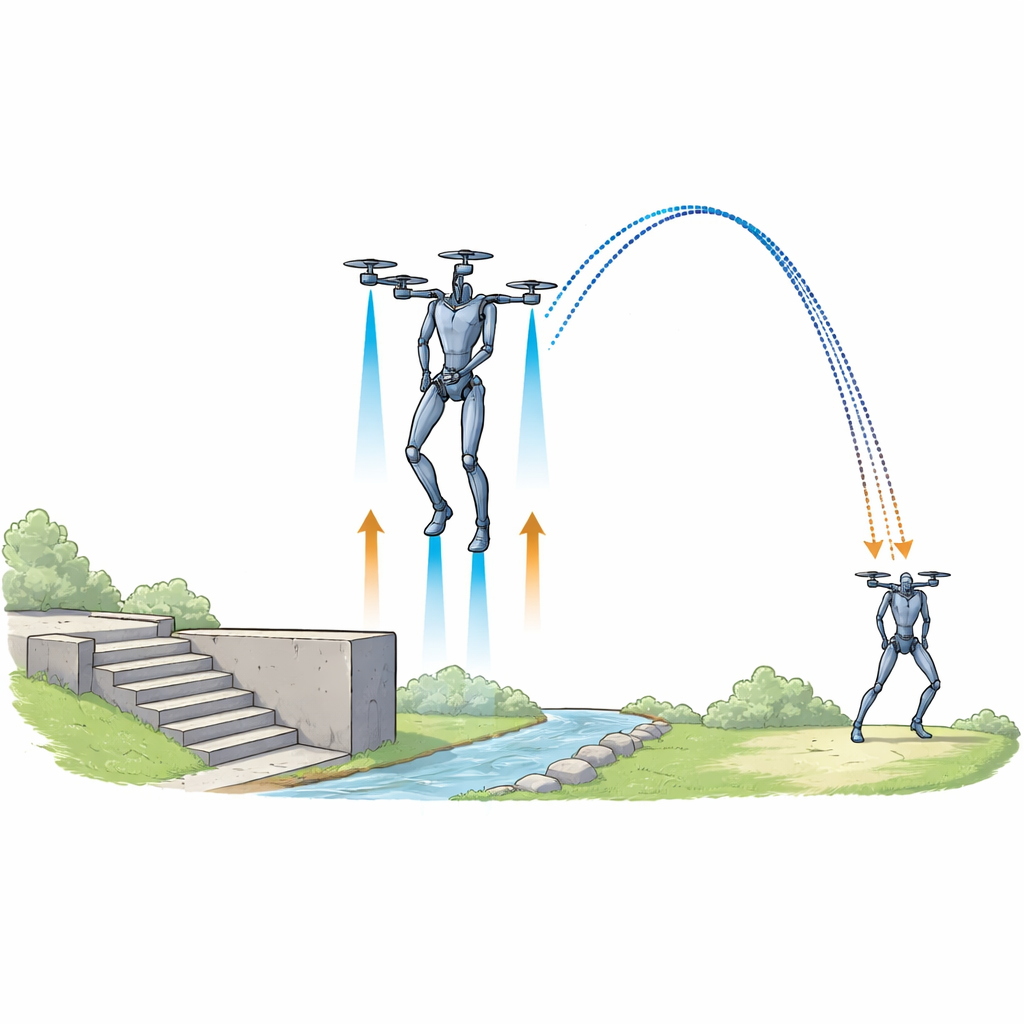
壁を飛び越え、渓流を跨ぎ、動く窓をくぐっても着地点の誤差を1センチ以内に収められる救助ロボットを想像してみてください。本論文はまさにそれを実現する新しい跳躍機構を述べています。着地中に高い精度と予測可能性を保ちながら、短時間だけ“低重力”状態(例えば月や冥王星上のような状態)を自ら作り出すことで実現しています。
現在の跳躍ロボットが苦戦する理由
バッタやカエルのような動物は遠くまで跳び、狭い止まり木に着地し、空中で動作を修正できますが、多くのロボットにはそれができません。従来の跳躍ロボットはトレードオフに直面します。強力なバネやモーターで大きく跳べるが着地の精度や安全性が犠牲になるか、あるいは制御しやすく正確に着地できるが高いジャンプができないかのどちらかです。ばねを使った“カタパルト”設計は大きなエネルギーを蓄えられますが再充填が遅く、空中では制御が難しい。モーター直駆動の脚は制御性に優れますが、非常に高い跳躍に必要な瞬発力が不足しがちです。翼やローターを付け足せば滞空時間を延ばせますが、飛行軌道が不規則になりやすく、小さな目標に確実に着地したり動く障害物を避けたりする際に問題になります。
空気の推力で低重力を擬似的に作る
研究者たちはGravOffと呼ぶ370グラムの二足ロボットを作り、このトレードオフを回避しました。ロボットは昆虫のように長い脚をモーターで直接駆動し、幅広いフレームに4つの小さなプロペラを搭載しています。跳躍時に脚で地面を素早く蹴ることで高い離陸速度を得る一方、プロペラは地球重力の一部を打ち消すようにわずかに上向きの推力を与えます。著者らはこの状態を“推力誘起ハイポグラビティ(低重力)”と呼んでいます。‘有効重力’が小さくなることで、同じ脚の出力でもロボットははるかに高く長い弧を描きます――最大高さは6.9メートルで体長の約46倍に相当し、最高記録を出す跳躍ロボットに匹敵しますが、離陸と着地の速度はより穏やかです。
理想的な弧の描画と舵取り
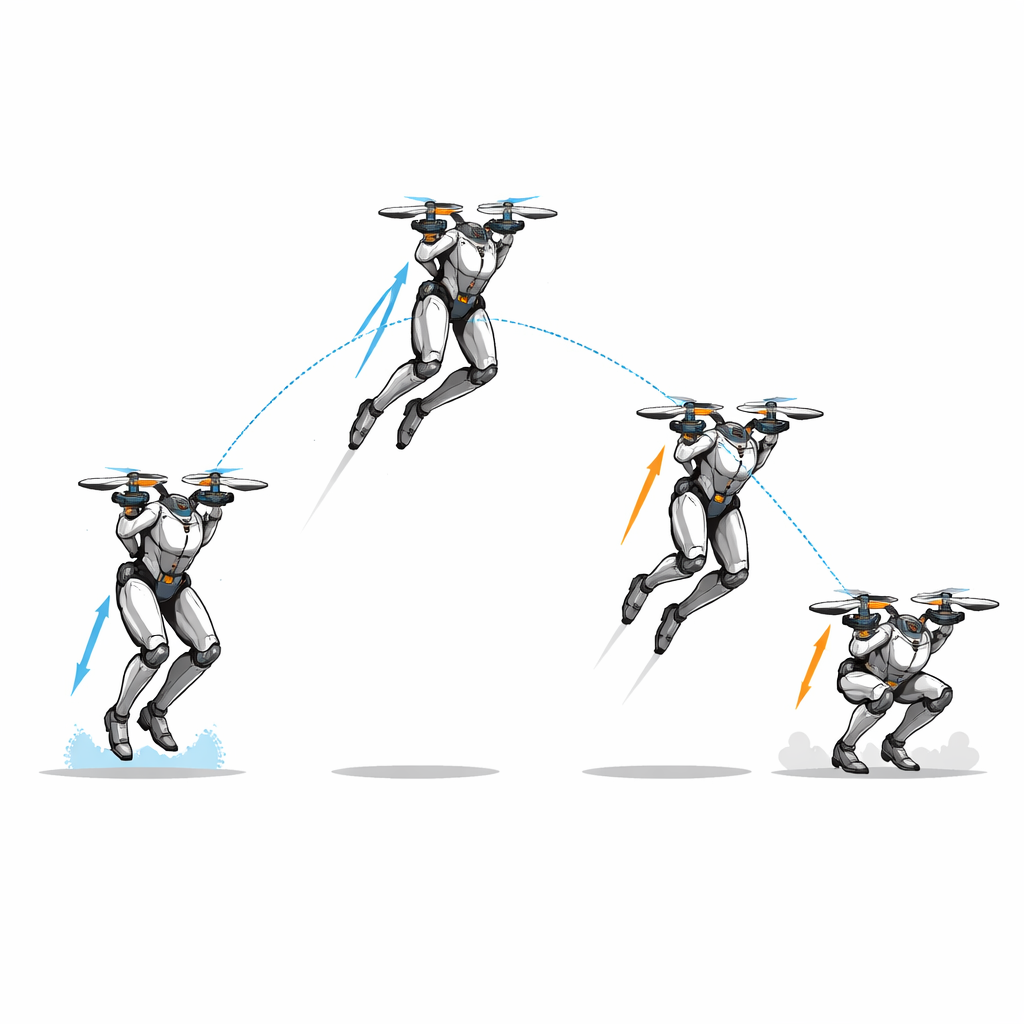
GravOffが特に珍しいのは跳躍距離だけでなく、選んだ軌道に非常に正確に沿って飛べる点です。チームは各跳躍を時間で刻まれた弧と見なし、位置と時間を描いた放物線上の点のように結びつけます。センサーと予測制御アルゴリズムを用いて、ロボットは空中での実際の運動を参考の曲線と毎秒数十回比較し、プロペラをわずかに傾けて軌道に戻します。重要な点は、プロペラが機体の傾きと独立して回転できるため、機体全体を大きく傾けずに推力の向きを変えられることです。これにより姿勢制御と操舵を分離でき、離陸角が15度ずれている場合や飛行中に秒速3.5メートルの強風を受けても、25センチ四方の正方形内にミリメートル単位の再現性で着地できます。
跳ね返りのない柔らかく安定した着地
高い跳躍は通常、強い着地衝撃を伴い、機器を損傷したりロボットを転倒させたりします。GravOffは二つの着地モードでこれに対処します。特に強い衝撃に対しては、各脚に取り付けた3Dプリントのソフトなショックアブソーバがエネルギーを吸収します。小さなあるいは移動する目標への精密な着地では、ロボットは脚を能動的に引き込み、適切な瞬間に再び伸ばして接地時間を引き延ばします。この“能動ダンピング”により、受動的な着地と比べて衝撃力を約4分の1に低減し、入ってくる運動量をほぼ相殺するため、ロボットは最初の接地で停止し、跳ね返らずに着地できます。
実験室の跳躍から実環境ミッションへ
制御された屋内実験にとどまらず、著者らはGravOffが這行(クロール)や車輪走行と跳躍を組み合わせて実際の地形に対応できることを示しています。草地、砂地、石畳、溝のある舗装上をゆっくりと這って安全な離陸姿勢を取り、低重力ジャンプで多段の階段、2.35メートルの高さの壁、幅3メートルの小川などの障害をクリアできます。中程度の障害を越える場合、低重力ジャンプ戦略は純粋な飛行よりもはるかにエネルギー効率が良いことも示されました。いくつかの試験では、同じ障害をホバリングや飛行で越える際に必要な総エネルギーの十分の一未満で跳躍が可能でした。
これが将来のロボットに意味すること
簡潔に言えば、本研究はロボットが重力を弱めるふりをして離陸後に軌道を修正することで、より遠く、より正確に、より安全に跳べることを示しています。GravOffの設計は、災害対応で瓦礫を跳び越える探索ロボットや,他惑星の崖やクレーターをまたぐ探査機など、いつどこに着地するかを正確に予測できる将来の機体の可能性を示唆します。同じ考え方――推力で重力を相殺し、飛行中に弧を操舵する手法――は多くの他の跳躍ロボットにも導入でき、跳躍をリスクの高い最後の手段ではなく、計画的で信頼できる移動手段に変える可能性があります。
引用: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
キーワード: 跳躍ロボット, 低重力(ハイポグラビティ), 推力ベクトリング, 脚式歩行, 軌道制御