Clear Sky Science · ja
生物に着想を得たスパイク・アーキテクチャがエネルギー制約下の触覚エンコーディングを可能にする
ロボットにとって賢い「触覚」が重要な理由
私たちの指先は、砂粒や滑りかけたグラス、軽いタップなどを一瞬で感じ取り、しかもごくわずかなエネルギーしか使いません。ロボットが工場から家庭や病院、混雑した職場へ移動するにつれて、人や壊れやすい物体と安全にやりとりするために同等の触覚が必要になります。本研究は、新しい人工皮膚と脳に着想を得た処理システムを紹介します。これにより機械は低エネルギー消費を維持しながら高精度で触れられた位置を検出できます。これは今後の移動型や協働ロボットにとって重要な要件です。
私たちの皮膚に似た柔軟な皮
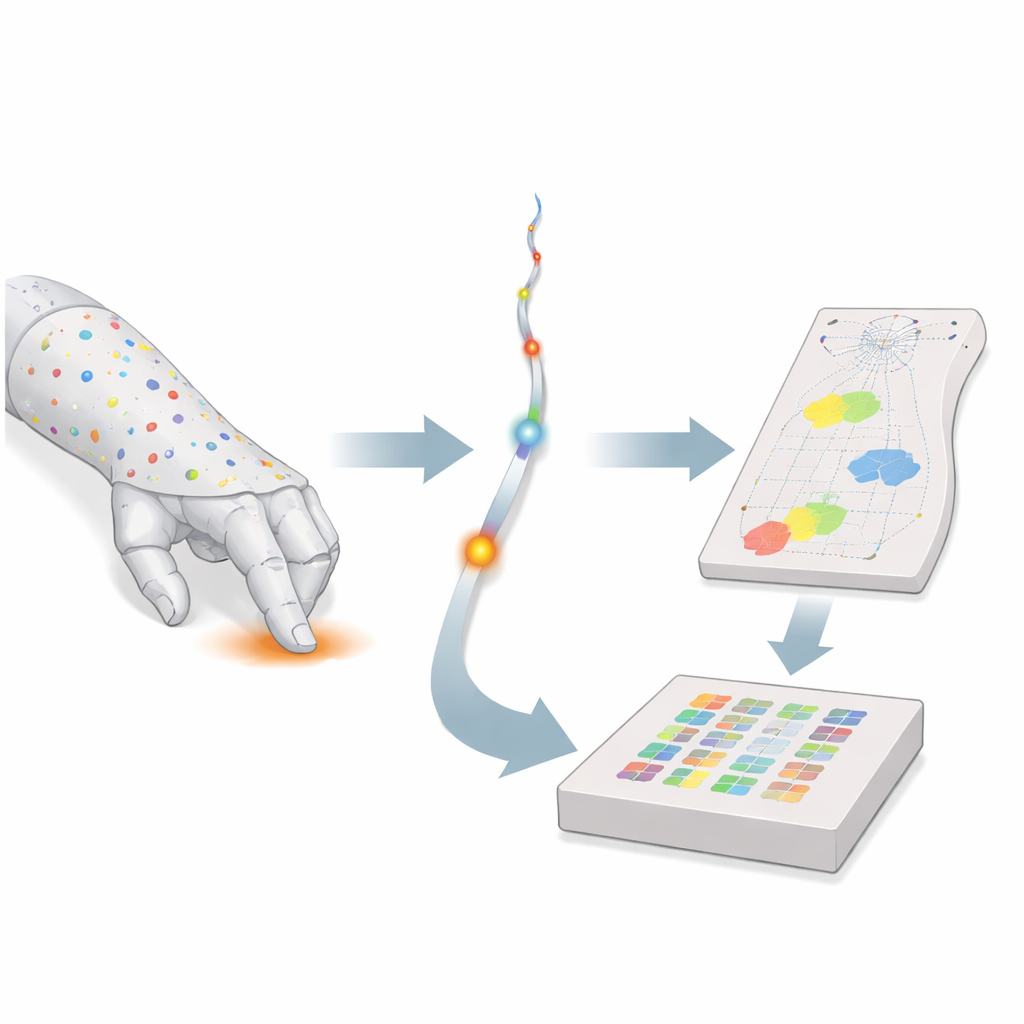
研究チームは、人間の前腕の形をした柔らかいシリコーン製の「e-スキン」を作り、一本の髪のように細い光ファイバーに沿って21個の微小な光学センサーを配しました。これらのセンサー(ファイバーブラッググレーティング)は、皮膚の伸びや曲がりに応じてファイバー内で反射する光の波長が変化します。ファイバーが表面の下を蛇行するため、各センサーは単一の点ではなく小さな領域に感度を持ち、実際の皮膚に分布する触覚受容器と似た性質を示します。局所的な圧力に強く反応する受容器もあれば、変形を広く捉えるものもあり、人間の皮膚におけるさまざまな神経終末が細かい情報と全体像の両方を捉えるのと同様です。
触覚を電気的スパイクに変換する
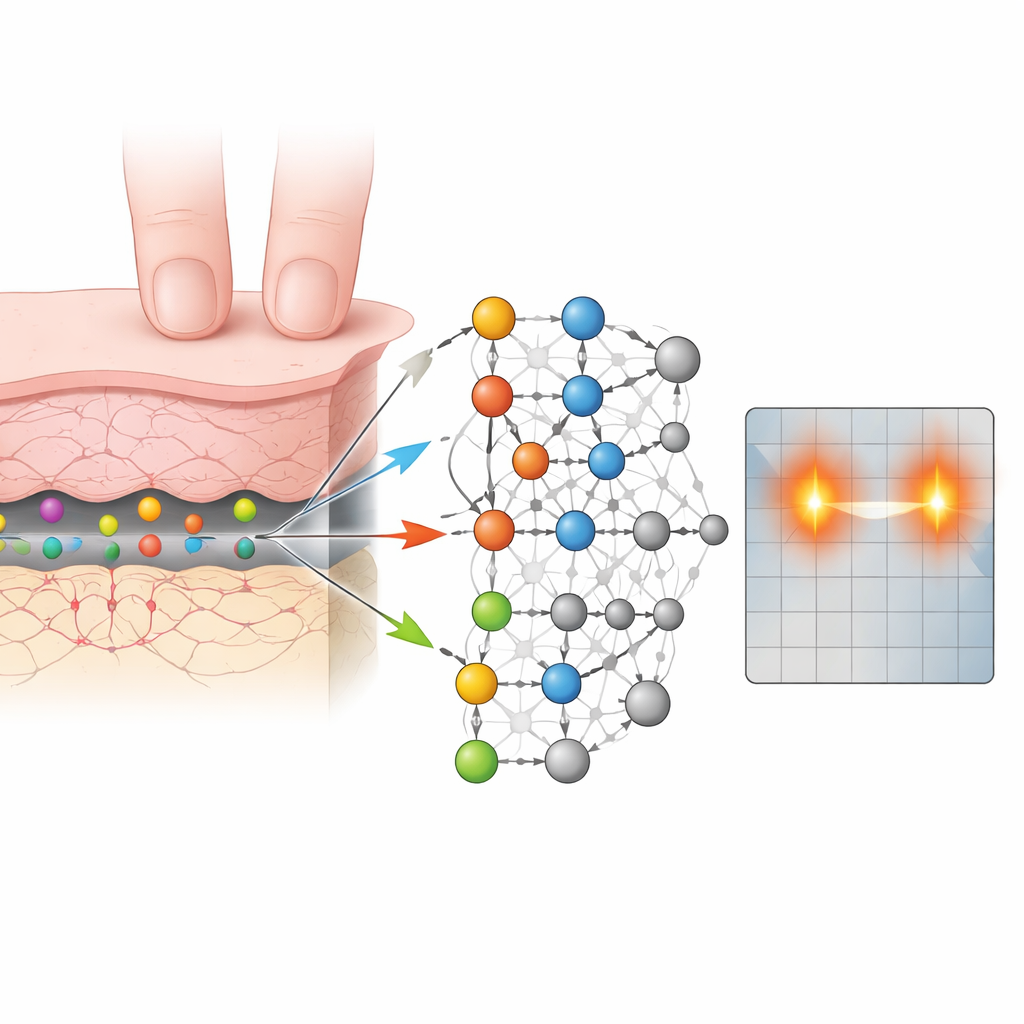
この豊富なデータの流れを解釈するために、チームは数値のフレームを処理する従来の深層学習モデルに頼りませんでした。代わりに、生物により近い方法を模倣してスパイキングニューラルネットワークを用い、情報を短い電気パルス(「スパイク」)として伝達させました。e-スキンからの光学信号はスパイクの列に変換されネットワークに送られます。このネットワークの各出力ニューロンは皮膚上の特定のスポットに対応し、表面の二次元内部地図を形成します。何かがe-スキンに触れると、ニューロンのクラスターがスパイクを発し、そのパターンから接触位置が明らかになり、システムはその活動の中心から触れた位置を算出します。
少ない資源でより鋭い触覚
この設計により、システムは人工前腕上の単一接触点を典型的に約3ミリメートルの誤差で局在化し、強力な深層学習ベースラインより約3分の1優れ、センサー間隔だけから期待される空間分解能より約10倍優れた結果を示しました。同時に複数点(最大4点)の接触があっても機能し、手動で力や方向を変えながら押しても対応できます。研究者たちはネットワーク内の異なる配線パターンを調べ、興奮性細胞が抑制性介在ニューロンに入力して隣接する出力を抑える、脊髄の早期触覚経路に着想を得たレイアウトが空間的な鋭さを出す上で重要であることを見いだしました。この「側方抑制」は表現を鮮明に保ち、接触が近接したときのぼやけを防ぎます。
正確さだけでなく低エネルギーに最適化
この研究の中心的な目的は、ロボット全体にセンサーが張り巡らされた場合に重大になるエネルギー消費を抑えることです。チームはネットワークを、発火(スパイク)を減らすように段階的にプレッシャーをかけて訓練し、進化が性能を代謝コストとトレードオフしてきたことを模しました。制約のない条件では、より柔軟で生物学的リアリズムに欠けるアーキテクチャがやや良い性能を示しました。しかしスパイク活動をエネルギー効率の高いレベルに落とすと、むしろ生物由来の配線が同じ活動量でより高い精度を発揮しました。研究者らはこのネットワークを混成信号のニューロモルフィックチップに移植し、ニューロンとシナプスをアナログ回路として直接実装しました。このハードウェア上では、触覚動作時に0.001ワット未満、待機時には数マイクロワットで動作し、精度の損失は最小限にとどまりました。
実験室の前腕から将来のロボットの身体へ
総じて、この研究は柔軟で分散したセンシングと脳に似たスパイキング計算を組み合わせることで、機械に高精度で高速な触覚を重いエネルギー負担なしに与えられることを示しています。神経系の初期触覚経路の配線原理だけでなく性能も模倣することで、これらの回路モチーフがなぜ進化で選ばれたのかを示唆しています:厳しいエネルギー制約下で十分な精度を提供するからです。規模を拡大すれば、同様のe-スキンとニューロモルフィックプロセッサはロボットや義肢が表面全体で接触を感じ、予期せぬ衝突に素早く反応し、人間が生活・作業する複雑で動的な環境でより安全かつ自然に相互作用することを可能にするでしょう。
引用: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
キーワード: 人工皮膚, 触覚センシング, スパイキングニューラルネットワーク, ニューロモルフィックハードウェア, ロボットの安全性