Clear Sky Science · ja
触覚センサーが互いに力の感覚を学習するように訓練する
感覚を持ち、共有できるロボット
ロボットが工場から家庭、病院、倉庫へと進出するにつれて、私たちが当たり前に思っている感覚――触覚が必要になります。私たちの指がポテトチップをつまむときと重い箱を持ち上げるときで自然に力を調整するように、未来のロボットもどれだけ強く握るかや物体が滑り始めるタイミングを学ばなければなりません。本記事は、ロボットの「皮膚」が他の皮膚から力の感覚を学ぶ新しい方法を紹介します。高価な較正を減らし、人間に近い器用さへと機械を近づける手法です。
ロボットの触覚が難しい理由
現代のロボットにはすでに多様な人工皮膚があります。柔らかいゲル内を小型カメラで観察するもの、磁気や電子グリッドで圧力を検出するものなど設計はさまざまです。各設計は特定の作業に優れますが、触覚の「方言」が異なります。同じ押し込みでも二つのセンサーがまったく異なる信号を出すことがあるのです。現在では、新しいセンサーは通常、精密な力計を用いた数千回にも及ぶ手間のかかる学習プロセスを必要とします。さらに、柔らかい材料は経年劣化や摩耗が生じるため、センサーを交換するたびにこの高コストの較正をやり直す必要があります。
人間の脳から採ったアイデア
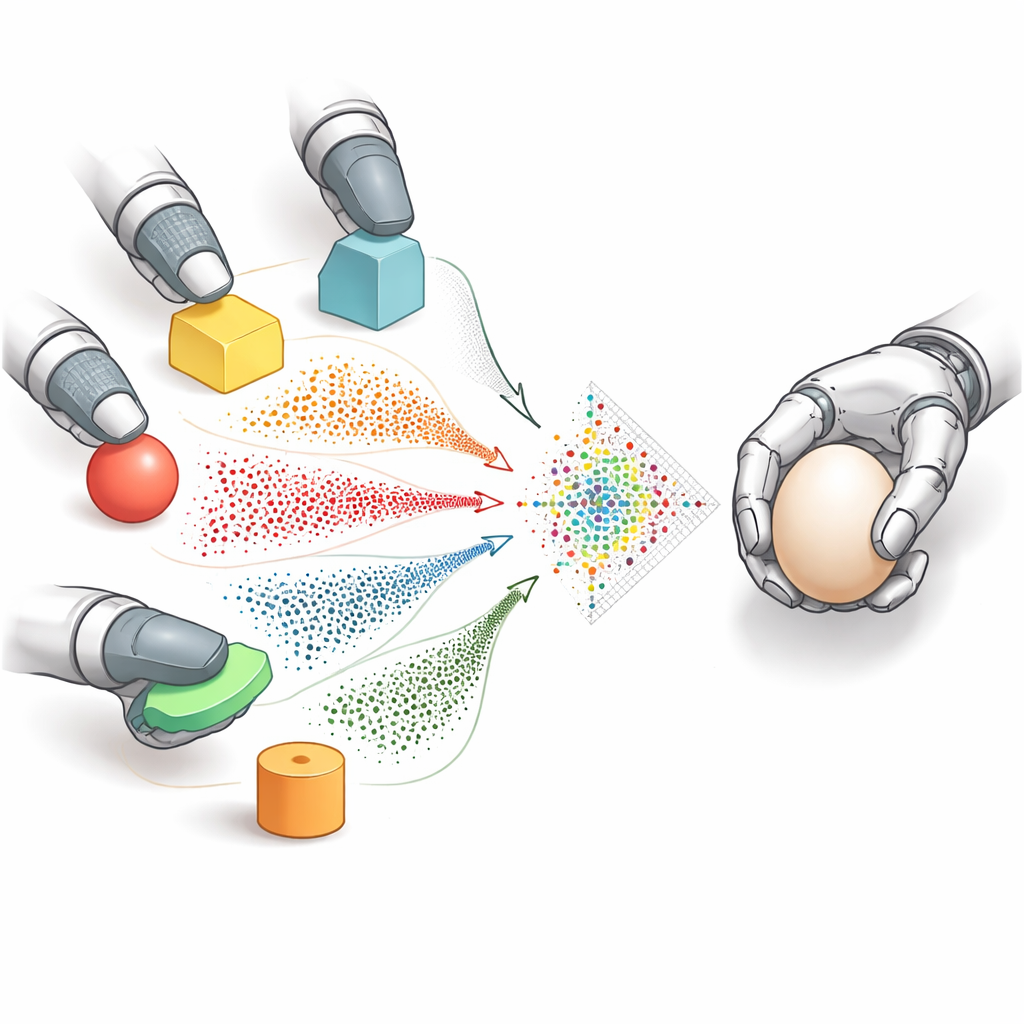
人間は同様の問題を簡単に解決します。私たちの皮膚にはさまざまな種類の触覚受容体が詰まっていますが、脳はそれらすべての信号を共有の内部コードに変換します。その統一された触覚の記憶により、手の触れたことのない部分がどのように感じるかを過去の経験から推定できます。本研究のチームはロボットでこの考えを模倣します。カメラ画像、磁気読み取り、電子信号などすべてのセンサー出力を、皮膚の変形を表す点(ドット)で構成された共通の画像のような形式に変換します。この共有されたマーカー表現が、どのセンサーも使える単純な「触覚の言語」として機能します。
あるセンサーに別のセンサーを模倣させる
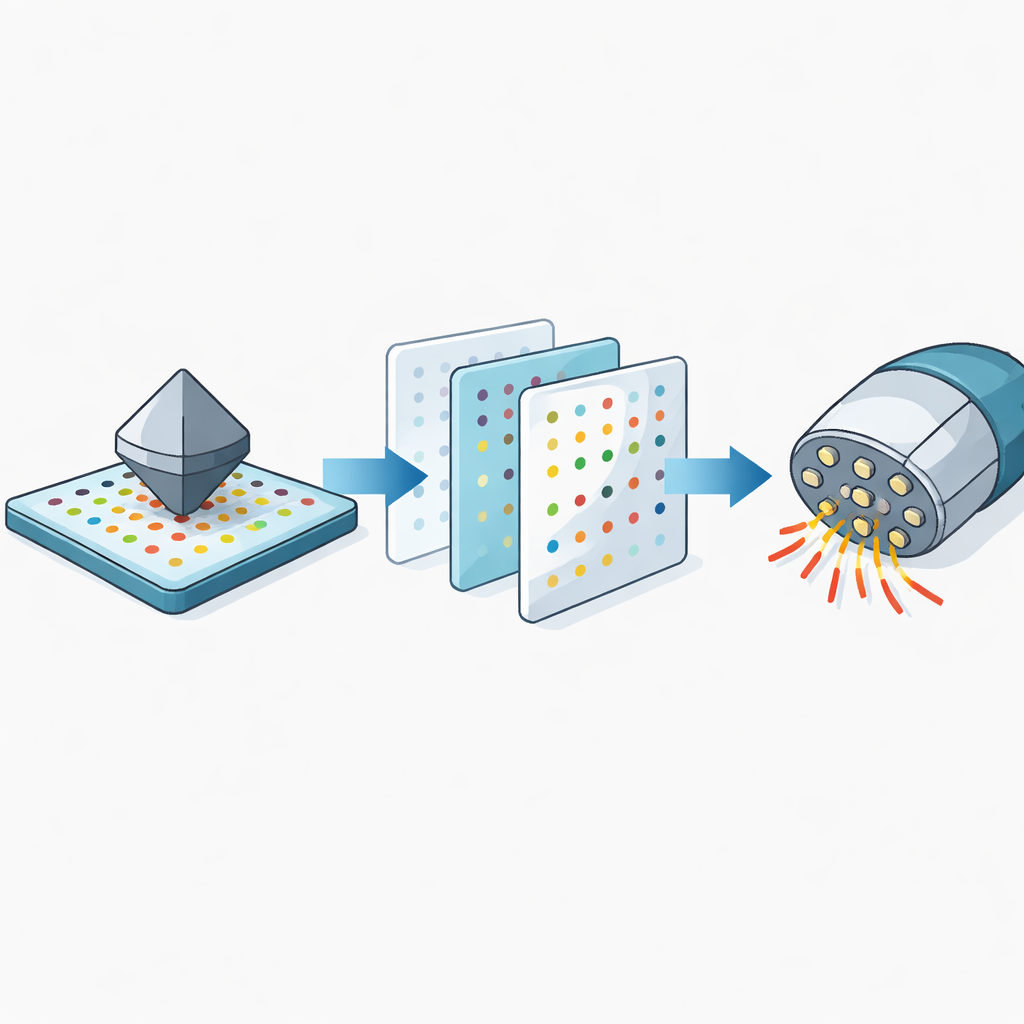
すべてのセンサーがこのドットベースの言語を話すようになると、チームはマーカー間翻訳と呼ぶ変換ステップを導入します。強力な生成モデルを用いて、あるセンサーのドットパターンを同じ接触条件下で別のセンサーが示したであろうパターンに変換できるシステムを訓練します。つまり、よく較正されたセンサーは未較正のセンサーが感じるであろう様子を「想像」し、合成の訓練データを生成できます。続いて別のモデルがこれらのドット画像の短い連続列を見て、押す方向と横ずれ(せん断)の両方を考慮しながら、三方向における力の時間変化を予測します。
現実世界の柔らかい皮膚の差異への対処
実際には、ロボットの皮膚は形状や配線が異なるだけでなく、柔らかさや硬さも素材ごとに異なり、経年で変化します。たとえパターンが似ていても、これらの違いは力の推定を歪めることがあります。研究者たちは各種柔らかい材料が荷重に対してどのように曲がるかを測定し、訓練前に力のラベルを上下にスケーリングする単純な補正ステップを構築しました。この材料補償は、特に非常に柔らかい皮膚と非常に硬い皮膚の間で知識を転移する際の誤差を大幅に減らします。
研究室から日常の操作へ
彼らはGenForceと呼ぶ手法を、同じカメラ型パッドの複数のコピーから磁気式や曲面の指先型など非常に異なる設計まで、幅広いセンサーでテストしました。シミュレーションとハードウェアを合わせ200以上の組み合わせで、GenForceは他のセンサーで訓練されたモデルを単に再利用する場合と比べて予測誤差を大幅に削減しました。実演では、各指に異なる触覚皮膚を備えたロボットハンドが、転移学習で得たモデルを用いて果物やポテトチップのような壊れやすい物体を繊細につまみ、把持の両側の読み取りを協調させて滑りを検出・修正しました。
ロボットハンドの未来に向けて
触覚センサーが互いに力の感覚を学び合えるようにすることで、GenForceはロボットハンドを大規模に導入する際の容易さとコスト削減に道を開きます。慎重に較正された1つのセンサーが多くの他のセンサー、異なる設計のものさえも訓練でき、事前学習済みモデルは少量の新しいデータで微調整できるでしょう。専門外の人にとって要点は明快です:この研究によりロボットがどれだけ強く握っているかをより実用的に感知し、物体が滑り始めたときに素早く反応できるようになり、人間の手と同じような確かな触感で現実世界を扱える機械に一歩近づきます。
引用: Chen, Z., Ou, N., Zhang, X. et al. Training tactile sensors to learn force sensing from each other. Nat Commun 17, 2101 (2026). https://doi.org/10.1038/s41467-026-68753-1
キーワード: ロボットの触覚, 触覚センサー, 力のセンシング, ロボット操作, 転移学習