Clear Sky Science · ja
ロボットと機械学習を統合したワークフローによる伸張に対して性能が不変な伸縮電極の予測設計
皮膚のように伸びる電子機器
心拍を追跡するスマートシャツから生物のように動くソフトロボットまで、次世代の機器には伸びたりねじれたり曲がったりしても壊れない配線や電池が求められます。本論文は、元の長さの数倍に引き延ばされても動作を維持する「伸縮電極」を設計する新しい手法を示します。実験用ロボット、人工知能、コンピューターシミュレーションを組み合わせることで、研究者たちは脆い金属ではなく弾性のある皮膚のように振る舞う材料と構造を発見しました。
伸びる配線が難しい理由
ほとんどの金属や電池材料は電気を運ぶのに優れていますが、ひずみに対しては脆弱です。引き伸ばされると薄い金属膜はすぐにひび割れ、電気抵抗が急増してデバイスが故障します。エンジニアは液体金属、ナノワイヤのネットワーク、応力を分散させる巧妙なパターンなどを試してきましたが、高導電性、大きな伸縮性、ひずみに対する安定した性能という三つの要件を同時に満たすことは依然として困難です。パラメータを一つずつ変えて試す従来の試行錯誤法では、考えられる配合や加工手順の膨大な組み合わせに対応できません。
ロボットとAIに広大な設計空間を探らせる
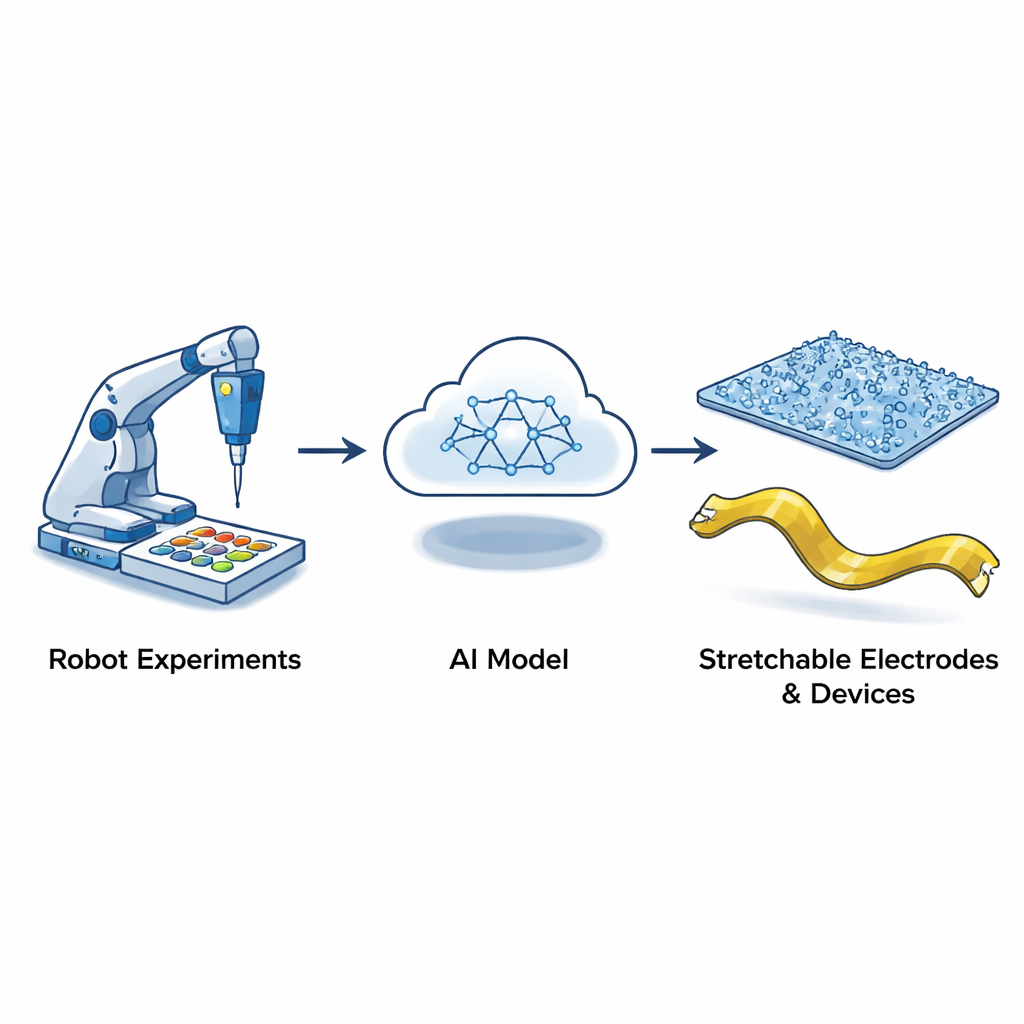
著者らはこの問題に、統合された「材料探索」パイプラインを構築して取り組みます。ピペッティングロボットがまず導電性MXeneシート、カーボンナノチューブ、金ナノ粒子、柔軟ポリマーという四つの構成要素の何百もの組み合わせを混ぜます。これらの混合物を薄膜にして導電性を試験します。得られた結果を用いて機械学習モデルが性能の悪い候補を素早く除外し、有望な設計空間の小さな領域をマッピングします。その後、いくつかのラウンドにわたる「アクティブラーニング」で、AIが最も情報量の多い新しい配合と加工条件を提案し、ロボットがそれらを作製、チームが特性を測定し、モデルが更新されます。データ拡張の工夫により、数千件もの追加実験を必要とせずにモデルの信頼性がさらに高まります。
大きなひずみを抑える微小しわの作成
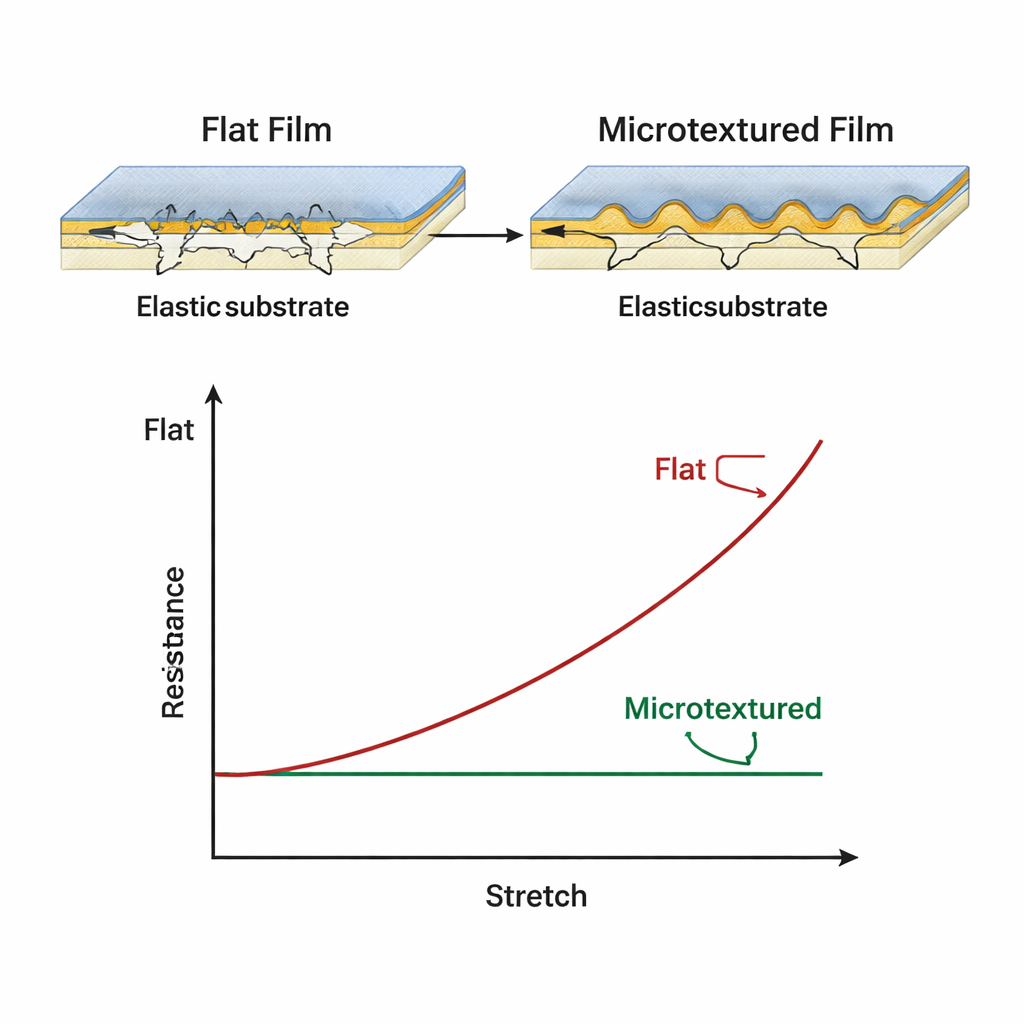
組成を越えて鍵となる洞察は、薄膜の表面形状を設計することで伸張に対処できることです。特殊なプラスチックシートや粘着テープ上で材料を縮小・再伸張することで、階層的なしわやクランプル(波状の上に立ち上がる稜線)を備えたマイクロテクスチャの薄膜が作られます。コンピューターシミュレーションはこれらの形状の働きを明らかにします:引っ張られるとまずしわがまっすぐになり、変形を吸収して材料自体が受ける局所ひずみを小さく保ちます。そのひずみがある閾値以下にとどまる限り、導電経路は断たれず、電気抵抗は数百パーセントの伸長でもほとんど変化しません。
超伸縮導体からソフトバッテリーへ
“チャンピオン”予測モデルを用いて、ワークフローは非常に薄い金膜を支える支持層として特定のマイクロテクスチャ化ナノコンポジットを推奨します。この最適化された積層は、ほぼバルク金属のように振る舞う金導体を生み出し、抵抗が目立って増加するまで元の長さの十倍以上に伸ばすことができ、数万回の伸縮サイクルにも耐えます。同じ設計原理は、完全に伸縮可能な亜鉛–二酸化マンガン電池の作製にも応用されます。ここでは、マイクロテクスチャの金コレクタが剛性のある電池材料の厚い層を支持しながら、完成したデバイスは300パーセントまで伸長でき、何百回もの充放電サイクルにわたってほとんど変わらない容量と効率を示します。
将来のウェアラブル技術への意味
専門外の読者にとって中心的なメッセージは、チームが我々の身体やソフトマシンとともに伸びる柔らかく耐久性のある電源と配線部品を実用的に作るレシピを示したことです。遅い手探りに頼る代わりに、ロボットとAIに導かれたプロセスは極端な変形下でも電気性能を安定させる材料の組み合わせと表面形状を迅速に見つけます。この戦略は、快適な医療用ウェアラブル、柔軟なIoT機器、次世代のソフトロボットの開発を加速し、皮膚や筋肉と同じように自然に動く電子機器に近づける可能性があります。
引用: Yang, H., Chen, Q., Chen, T. et al. Predictive design of stretchable electrodes with strain-insensitive performance via robotics- and machine learning-integrated workflow. Nat Commun 17, 1778 (2026). https://doi.org/10.1038/s41467-026-68484-3
キーワード: 伸縮性エレクトロニクス, ウェアラブル機器, 機械学習設計, ソフトバッテリー, マイクロテクスチャ素材