Clear Sky Science · ja
ゼブラフィッシュ胚向け磁気ピンセットを用いた自動化セル一括マイクロインジェクションシステムの設計
小さな魚の卵が重要な理由
新しい医薬品や遺伝子治療が人に届く前、研究者はしばしば成長が早く小型の動物で前臨床試験を行います。ゼブラフィッシュ胚は透明で発生が速く、器官が形成される様子をリアルタイムで観察できるため好まれます。しかし遺伝子改変や薬剤導入のためには、各繊細な卵を顕微鏡下で微細な針で注入する必要があり、その作業は通常遅く疲弊しやすく、人の技量に大きく依存します。本論文は、ゼブラフィッシュ胚のバッチを人より速く、より丁寧に、より確実に自動注入できる新しいロボットシステムを提示し、大規模で一貫性の高い実験への道を開きます。
壊れやすい細胞を扱う新たな方法
従来のマイクロインジェクションでは、熟練したオペレータが顕微鏡下でガラス針を操作し、各胚を見つけ、適切な向きに回転させ、重要な構造を傷つけないように貫通させる必要があります。胚は軟らかい球状で、生存を保つために避けるべき領域があるため特に難しい作業です。既存のロボットシステムは輸送や貫通の自動化を助けてきましたが、各胚を三次元的にどのように回転させるかを制御できないことが多いです。その結果、針が危険な角度で入る可能性があり、生存率が下がり、処理できる胚数が制限されます。本研究チームは、レンズの頻繁な切替や手動調整を必要とせず、胚を輸送し回転させ、注入して放出する一連の工程を滑らかに行える完全統合プラットフォームの構築を目指しました。
磁石とマイクロチャネルによるやさしい制御
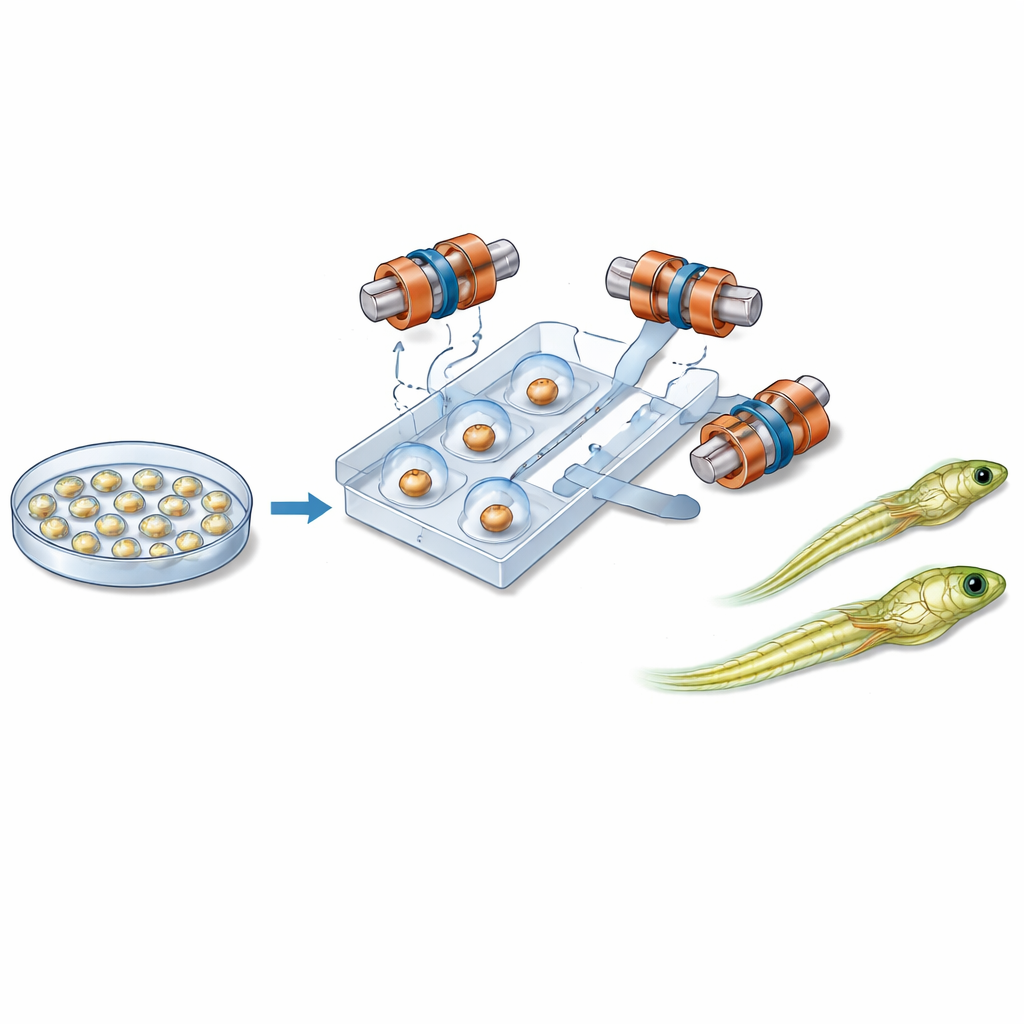
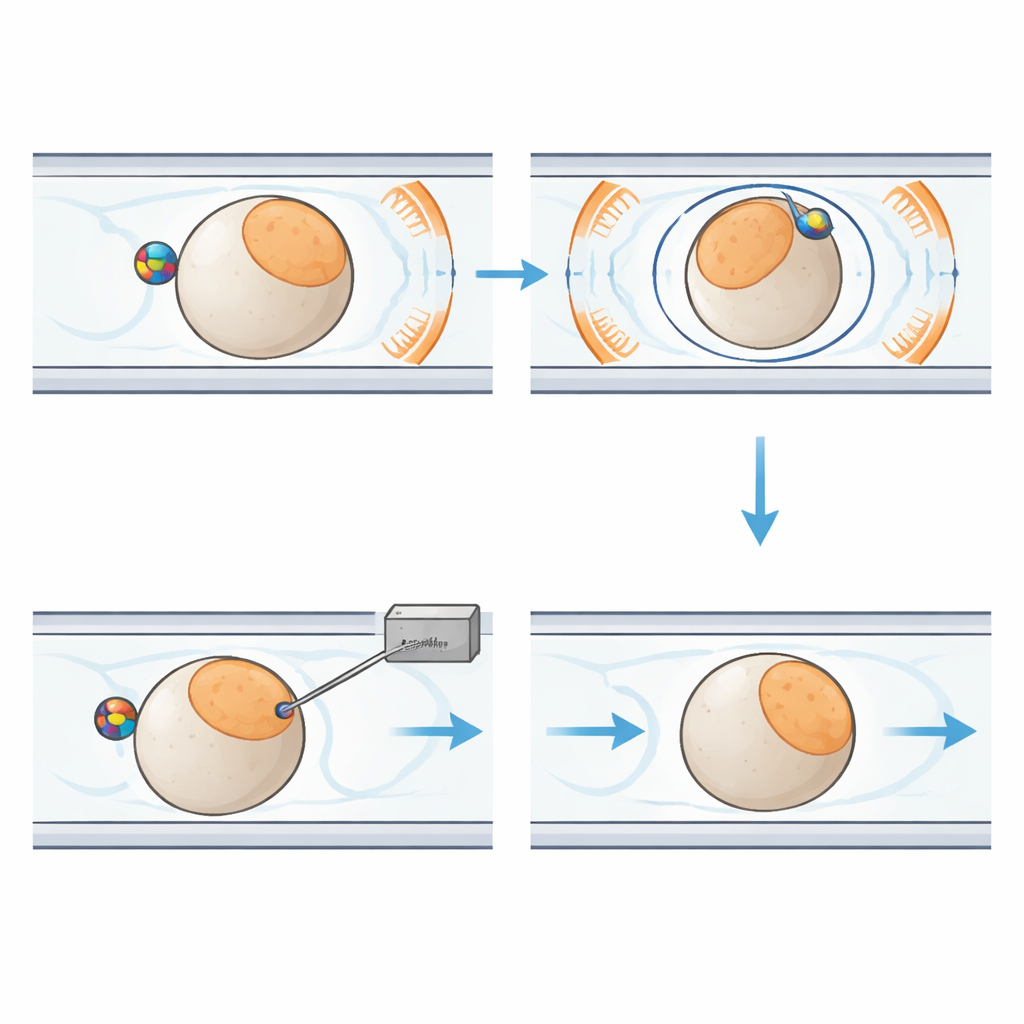
新システムの中核は、個々の胚を決まった経路に沿って誘導する狭いチャネルを備えた手のひら大のプラスチックチップです。各胚の近くには小さな磁性ビーズが配置されています。チップの周囲に配された6つのコイルが三次元の一様な磁場を作り出します。時間経過で磁場の方向を変えることにより、ビーズを回転させます。ビーズと胚表面間の摩擦のおかげで、2つの歯車が噛み合うように胚全体が同時に回転します。これによりロボットは胚を撮像面から傾けたり、平面内で回転させて、敏感な領域が針の侵入方向から安全に逸れる位置に調整できます。液体流と穏やかなエア圧で胚を移動・保持し、別モジュールが注入針と微量の遺伝物質流を制御します。
狭い視野で明瞭に見る
この精密な協調動作を可能にするため、研究者らは微視的操作認識ネットワークと呼ばれる高度なコンピュータビジョン系も設計しました。これは顕微鏡カメラの画像をリアルタイムで解析し、各胚を検出し、細い針先を識別し、発生上重要な構造が位置する卵の二つの反対“極”を区別します。ネットワークは二重の特徴抽出経路、重要な詳細を強調するアテンションモジュール、画像情報の多スケール融合といった現代的な深層学習手法を用いて、マイクロ流体チップ内の雑多で低照度な環境に対処します。何千枚もの画像での試験では、物体検出と胚領域のセグメンテーションを約98~99%の精度で達成し、磁気回転と針の配置を制御するための信頼できるフィードバックを提供しました。
生きたゼブラフィッシュでの実証
チームは自動化システムを熟練した人間の操作と比較し、各々100個のゼブラフィッシュ胚で評価しました。ロボットは胚一つ当たり約33.8秒で注入を完了し、手作業の2倍以上の速度でした。また全ての細胞に対して貫通に成功しました。胚の向き合わせは平均角誤差がわずか2.1度で、人間のオペレータの誤差のおよそ半分でした。最も重要なのは、ロボット注入群の88%が幼生として孵化まで生存したのに対し、手動注入では66%にとどまったことです。蛍光顕微鏡下では、自動システムで処理された幼生が緑色に光り、導入した遺伝物質が取り込まれ発現したことを示しました。胚を機械的に挟むのではなく磁気的に回転させることで、変形や損傷を最小限に抑えつつ高スループットを維持しました。
今後の研究に与える意味
簡潔に言えば、本研究はマイクロチャネル、磁気制御、そして高度な画像解析を慎重に組み合わせることで、熟練者による従来手法よりも速く、より高い生存率で壊れやすい魚胚に注入できることを示しています。ゼブラフィッシュは発生学、疾病研究、薬理効果の評価における重要なモデルであるため、信頼性の高いハイスループット注入装置は、大規模な遺伝子スクリーニングや従来は手作業に制約されていた長期生物学的研究を加速させる可能性があります。チップや制御設定を適切に設計し直せば、同じ戦略は他の細胞種や小型生物にも適用でき、特定の熟練者だけが行ってきた繊細な細胞手術を自動化され標準化されたプロセスへと移行させる手助けになるでしょう。
引用: Guo, X., Wang, F., Zhao, A. et al. Design of an automated cell batch microinjection system based on magnetic tweezers for zebrafish embryos. Microsyst Nanoeng 12, 113 (2026). https://doi.org/10.1038/s41378-026-01230-3
キーワード: ゼブラフィッシュ胚, マイクロインジェクション, 磁気ピンセット, マイクロ流体デバイス, ロボットによる細胞操作