Clear Sky Science · ja
高忠実度sEMG取得とロボットハンド制御のためのハイドロゲル電極
筋肉の声を聞いて機械を動かす
自分の筋肉を緊張させるだけでロボットの手を操作できると想像してください。手の機能を失った人や、精密なロボット支援を必要とする作業者にとって、身体と機械をこのように自然につなぐ仕組みは生活を一変させる可能性があります。しかし、現在広く使われている貼付式の金属電極は硬く、皮膚を刺激しやすく、しばしばノイズの多い電気信号しか得られません。本論文は、皮膚に馴染む柔らかい「ゼリー状」の電極を提案し、微小な筋電信号をより鮮明に捉えて、それらを用いて実物らしいロボットハンドを駆動する方法を示します。
皮膚のような感触の柔らかいパッチ
研究者らは、新しいハイドロゲルを設計しました。これはコンタクトレンズに似た弾性で水分を多く含む材料で、皮膚上の電極として機能します。彼らは一般的なプラスチックの構成要素に、キチン(甲殻類由来)やタンニン酸(植物由来)といった天然添加剤、さらにグリセロールや単純な塩類を組み合わせました。これらの成分により、伸縮性がありイオンを伝導するネットワークが形成され、柔らかく湿った状態で電荷を運ぶことができます。各成分の割合を細かく調整することで、元の長さの12倍以上に伸びても破断せず、信頼できる電気的性能を保つバージョンを作り出しました。
強靭で粘着性があり、自己修復可能
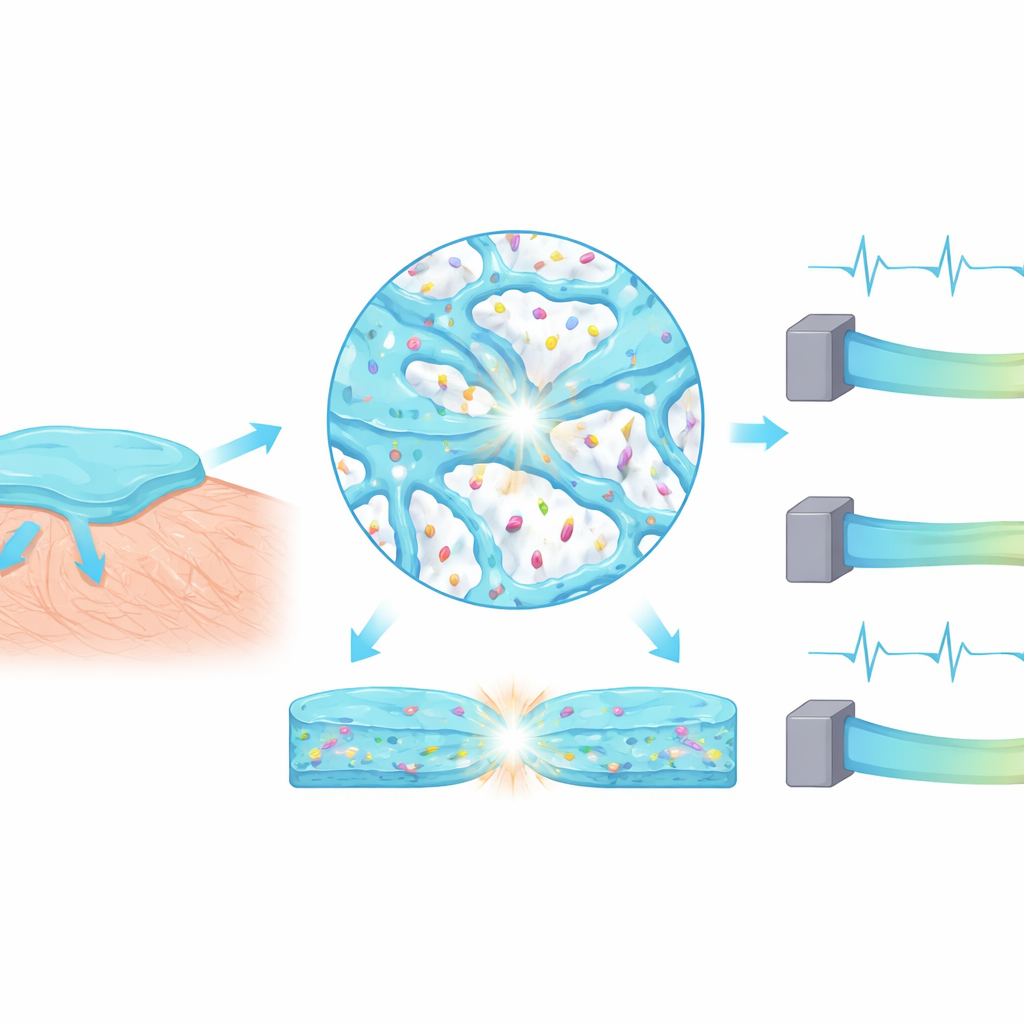
動く腕や手に装着しても機能するには、電極は位置を保持し、曲げや引っ張りに耐え、軽微な損傷後も作動し続けなければなりません。新しいハイドロゲルはこの三点で優れています。顕微鏡下では、分子間に多数の弱い結合が生む密なスポンジ状構造が観察されます。これらの結合はショックアブソーバーのように働き、材料が伸びたりねじれたり圧縮されたりしても元の形に戻ります。また、切れたゲル片が時間経過で再接続することを可能にし、試験では試料を半分に切って再び押し付けると徐々に癒合し、ほぼ元の電気伝導性を回復しました。一方で、タンニン酸に由来する化学基はプラスチックや金属、豚皮やヒト皮膚など多様な表面への強い接着性を与え、この粘着性は何十回もの貼り付け・剥離サイクルの後でも有用性を保ちました。
動いている筋肉からよりクリーンな信号を取得
次に、柔らかいゲルが皮膚表面からの筋電図(sEMG)信号——皮膚下の筋肉が生む微弱な電圧——をどれだけ良く拾えるかを評価しました。研究者らはボランティアの前腕にハイドロゲル電極を装着し、同サイズの市販の銀/塩化銀パッドと比較しました。拳を握る・緩めるといった単純な動作では、両方の電極が明瞭な波形を記録しましたが、ハイドロゲルは明らかに高い信号対雑音比を示しました。実務的には、目的の筋電信号が背景の電気的雑音からより鮮明に際立ち、電極を動かしたり再利用したりしても測定がより安定することを意味します。繰り返しの再装着や意図的な切断と自己修復を経ても、ハイドロゲルパッチは高品質な信号を取り続け、剛性のある金属性パッドを上回りました。
ロボットハンドにジェスチャーを読ませる
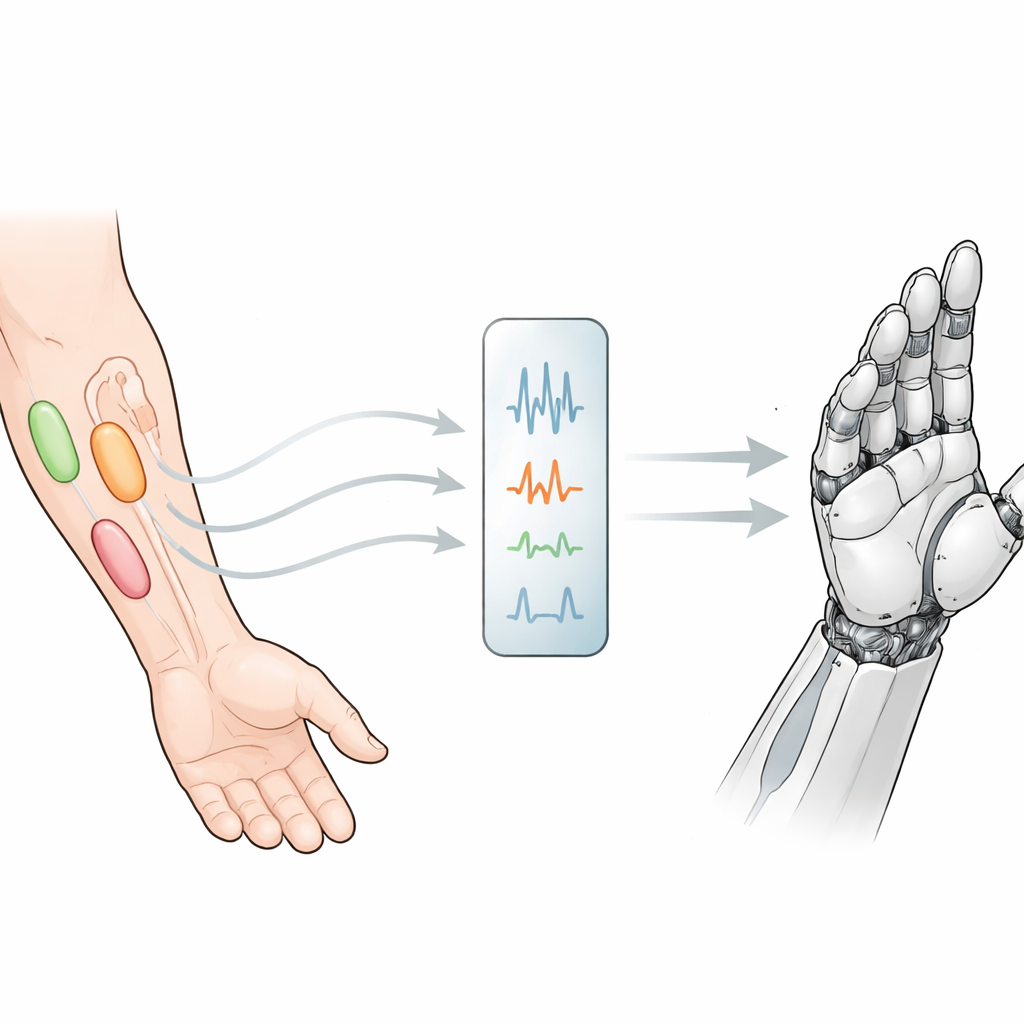
よりクリーンな筋電信号が得られたため、研究チームはそれらの信号を明確な手のジェスチャーに変換する完成システムを構築しました。彼らは前腕の屈筋と伸筋上に統合ハイドロゲル電極を配置し、ボランティアが「OK」サイン、サムズアップ、開いた手、指差し、拳など5種類の一般的なジェスチャーを行う際の電気パターンを記録しました。これらの記録から、信号の強さ、安定性、変化の速さといった単純な統計的特徴を抽出し、コンピュータモデルに入力しました。彼らは学習の速いニューラルネットワークと鳥の群れに触発された最適化法を組み合わせたアルゴリズムを用い、この組み合わせがどの筋活動パターンがどのジェスチャーに対応するかを短時間で高精度に学習することを可能にしました。
意図に近い信号から実際の動作へ
最後に、チームは認識ソフトウェアを生体模倣ロボットハンドに接続しました。ボランティアが訓練したジェスチャーの一つを作ると、ハイドロゲル電極がsEMG信号を捕え、アルゴリズムが意図されたジェスチャーを識別し、ロボットハンドがリアルタイムでその動きを反映しました。多数の試行で、システムは94%を超える高い確率でジェスチャーを正しく分類しました。しかも使用した信号特徴はごく小さなセットで済んでいます。一般向けの結論は明瞭です:柔らかく自己修復し粘着性のあるゲルパッチは、従来の金属パッドよりも快適かつ鮮明に皮膚越しの筋活動を聞き取り、支援ロボットの信頼できる制御を可能にします。このアプローチは将来の義手、リハビリ機器、そして身体の電気的言語に自然に応答するウェアラブル機器の基盤となり得ます。
引用: Yu, Z., Gu, Y., Ren, Y. et al. Hydrogel-based electrodes for high-fidelity sEMG acquisition and robotic hand control. Microsyst Nanoeng 12, 107 (2026). https://doi.org/10.1038/s41378-026-01219-y
キーワード: ハイドロゲル電極, 表面筋電図, ウェアラブルセンサー, ジェスチャー認識, ロボットハンド制御