Clear Sky Science · ja
作動機構を兼ねる折り紙機構に基づく並列脚の昆虫スケールロボット
狭い場所に入れる小さなロボット
ひび割れた壁の隙間に滑り込み、細い配管を這い進み、水たまりを泳いで渡れるほど小さく軽い救助ロボットを想像してください。本論文はそのような機体を紹介します:PLioBot と呼ばれる手のひらサイズの昆虫のようなロボットで、単一の折りたたみシートから作られ、同サイズでは非常に速く動き、さまざまな荒れた地形に対応します。研究者たちは、巧妙な折り方と小型振動モータ(圧電アクチュエータ)を組み合わせることで、平坦な材料を狭く到達しにくい場所を探査する機敏な機体に変えられることを示しています。
平らなシートから四脚クローラへ
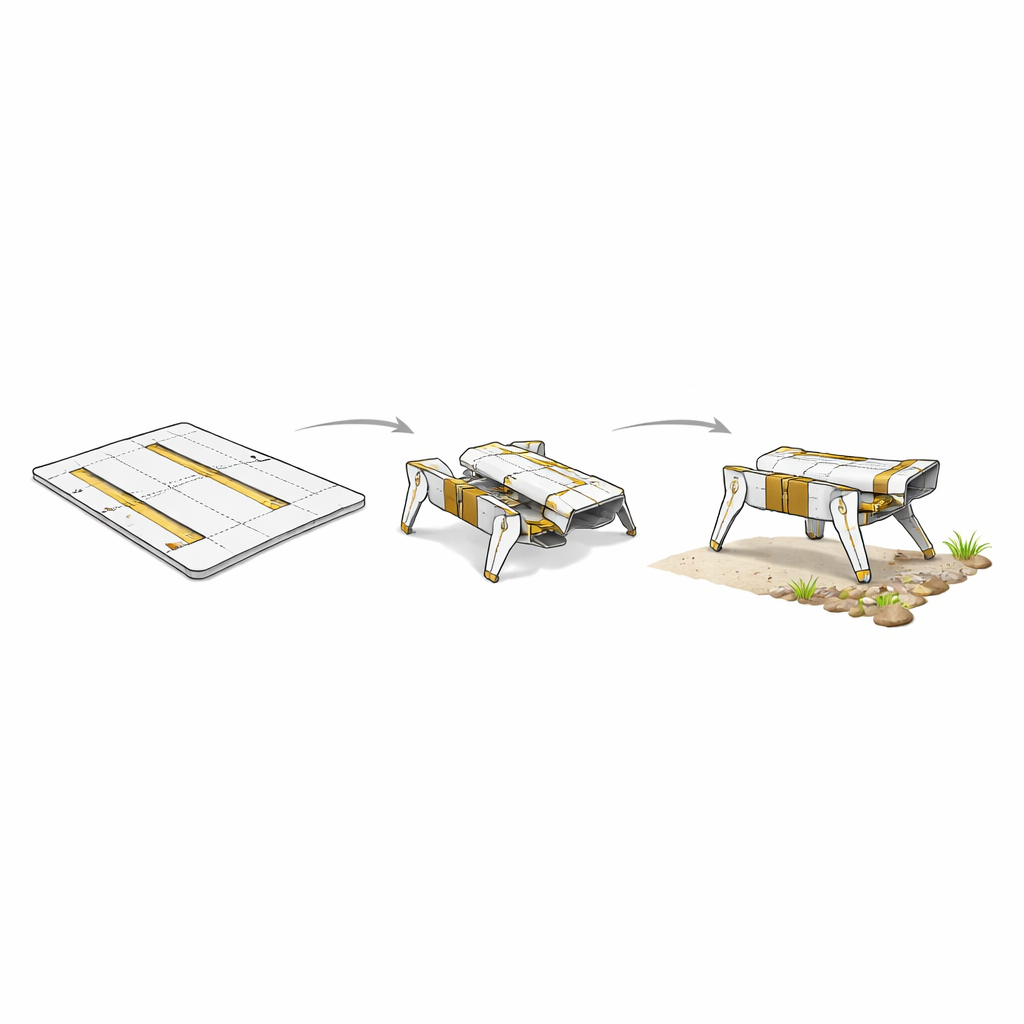
PLioBot は切り紙玩具のような平らな図柄から誕生します。紙の代わりに、その図柄はガラス繊維、炭素繊維、柔軟なプラスチック膜、筋肉の役割を果たす圧電セラミックの薄片を重ねた五層のサンドイッチになっています。プラスチック層には正確に配置された薄い領域がヒンジとして機能します。レーザー加工で切り出した後、胴体、四本の脚、計八個のアクチュエータが一続きの部材から現れるように折りたたむ一連の手順を行います。ねじも別のモーターも手動による位置合わせも不要で、折るだけで長さ約2.5センチ、重さわずか1.2グラムの完全なロボットが得られます。
小さな脚が大きな歩幅を生む仕組み
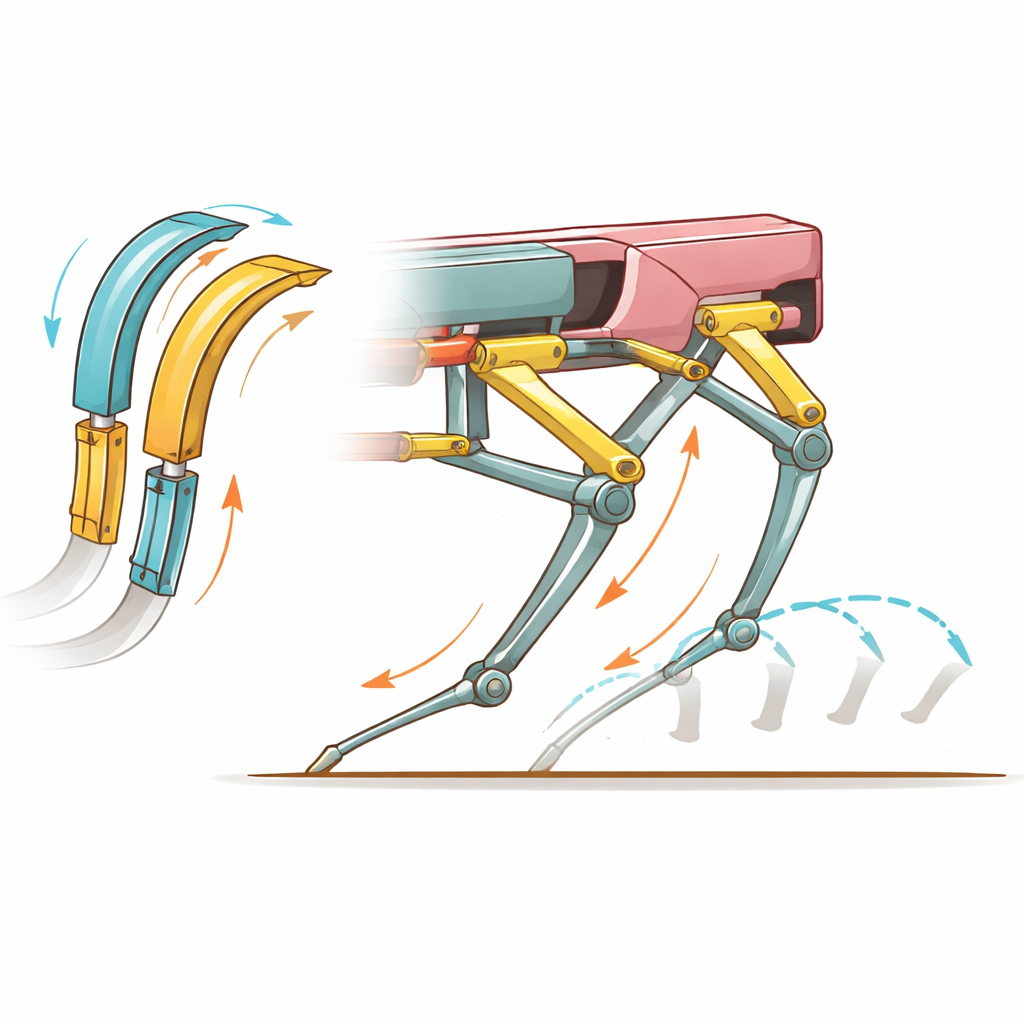
ロボットの動力は圧電セラミックに由来します—電圧をかけるとわずかに曲がる材料です。PLioBot の両側には一対の“ツイン”ストリップアクチュエータが備わっています。これらのストリップを交互に屈曲させると、その動きが一連のヒンジ付連杆を介して伝わり、小型の並列脚機構のように働きます。信号のタイミングを精密に制御することで、各脚は上下だけでなく前後にも動き、足先がループ状の軌跡を描きます。四本の脚を速歩に似たパターンで協調させることで、地面に効率よく力を伝えて前方へと突進します。最適設定では PLioBot は毎秒44.6センチ、体長の約18倍/秒に達し、このスケールでは最も速い脚式ロボットの一つになります。
内蔵の筋肉、組み立ての手間を削減
多くの昆虫スケールロボットは多数の小さな部品から慎重に組み立てられます:個別のモーターやアクチュエータ、フレーム、連杆などを手作業で整列させる必要があります。それはコストを増やし、精度を制限し、大量生産を難しくします。著者らは構造と駆動を単一の「折り紙機構」に完全統合することでこれに対処します。すべての層—硬いガラス繊維の表皮、直交する炭素繊維電極、柔軟なヒンジフィルム、セラミックストリップ—を切断し、重ね合わせ、ピン穴で位置合わせし、最終的にホットプレスで一体化した後に外形をレーザーで切り出す洗練されたラミネーション工程を用います。その結果、ロボットの骨格、関節、筋肉がすでに最終位置にある頑丈なフラットブランクが得られ、折りたたんで形にするだけで完成します。
現実の地形での歩行、登攀、泳ぎ
設計が実験台の外で役立つかを試すため、チームは PLioBot を日常的な障害物で走らせました。平滑なガラス上では滑りやすくなるリスクはあるものの、それでも速く移動します;スポンジやアクリル上ではグリップが増す代わりに多少速度が落ちます。最大12度のスロープを登り、自身より重いペイロード—最大1.7グラムまで—を運べます。特に約0.8グラム以下では良好な性能を示します。幅3センチ、高さ3センチ未満の狭いトンネルでは、1.4グラムの荷重を運びながらも数倍の体長/秒を維持します。半球形の足パッドやヒレ状のパドルを差し替えることで、砂利や草地を横断し、沈まないで移動できる砂地を渡り、タンクの底を歩き、フリッパーだけで推進して水面を泳ぐことさえできます。
将来の小型探査機にとっての意味
簡潔に言えば、この研究は本体と筋肉が一体になった非常に小さなロボットを印刷して折ることができ、そのロボットが高速で移動し、多くの現実的に乱れた表面に対応できることを示しています。PLioBot はまだ外部の電源線に依存しているため完全に独立しているわけではありません。しかし、統合された折り紙設計と製造法は、多数の安価な昆虫スケールロボットを平らな部品として生産し、折りたたんで形にし、微小なバッテリーや制御回路を搭載して配備できる将来を示唆します。そうした群れはいつか、損傷した建物の偵察、産業用配管の検査、あるいは他の惑星の探査などに用いられるかもしれません—すべて最初は巧妙に切られた一枚のシートのように見えるものから始まるのです。
引用: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
キーワード: 昆虫スケールロボット, 折り紙ロボティクス, 圧電アクチュエータ, 地形適応型走行, マイクロロボット製造