Clear Sky Science · ja
力で再均衡する速度計測モードに基づくMEMSジャイロスコープの動作モードにおける位相誤差解析
小さなジャイロが重要な理由
ドローンの姿勢制御から自律走行車の誘導まで、MEMSジャイロスコープと呼ばれる小型の運動センサーは、現代の機器を静かに安定させ進路を維持しています。回転を正確に測るために、これらのチップは精密にタイミングされた電子制御ループに依存します。本稿では、これらのループ内で発生する微小なタイミングのずれ、すなわち位相誤差が性能をどのように劣化させるかを検討し、どの誤差が実際に重要なのか、またジャイロを高精度で信頼できる状態に保つためにそれらをどのように補正できるかを示します。
回転を感じる二つの振動
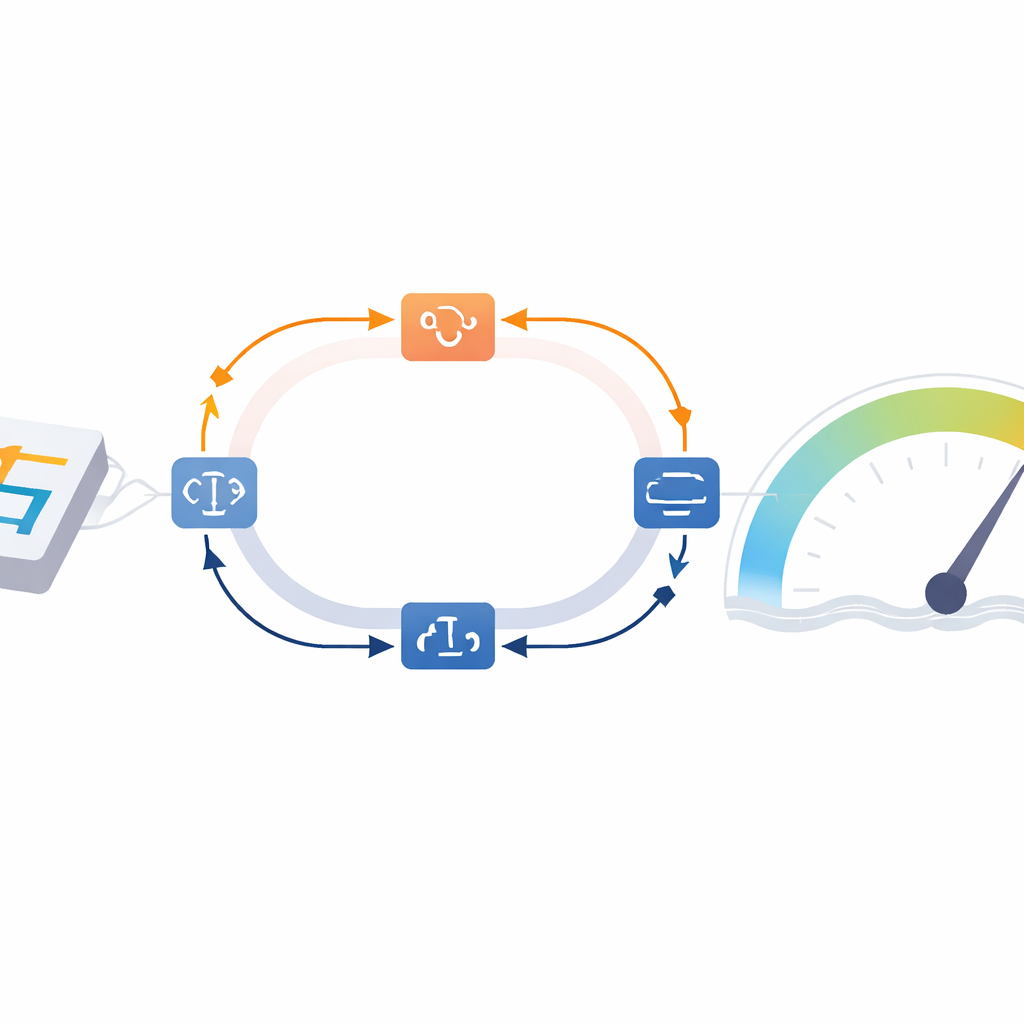
MEMSジャイロは、小さなシリコン構造を互いに直交する二つの方向に振動させることで動作します。一つは能動的に駆動されるドライブモード、もう一つは装置が回転したときに生じる横方向の力を感じるセンスモードです。電子回路はドライブ振動を一定に保ち、センスモードの微小な動きを回転速度の読み取りに変換します。多くの高度なジャイロでは、力で再均衡(force-to-rebalance, FTR)と呼ばれる手法が使われます:センス構造を自由に動かす代わりに、電子回路がその動きを打ち消すだけの力を与えます。その補正力の大きさが回転速度を明らかにします。この手法は安定性に優れますが、信号間の厳密なタイミングに大きく依存します。
タイミングが誤差になるとき
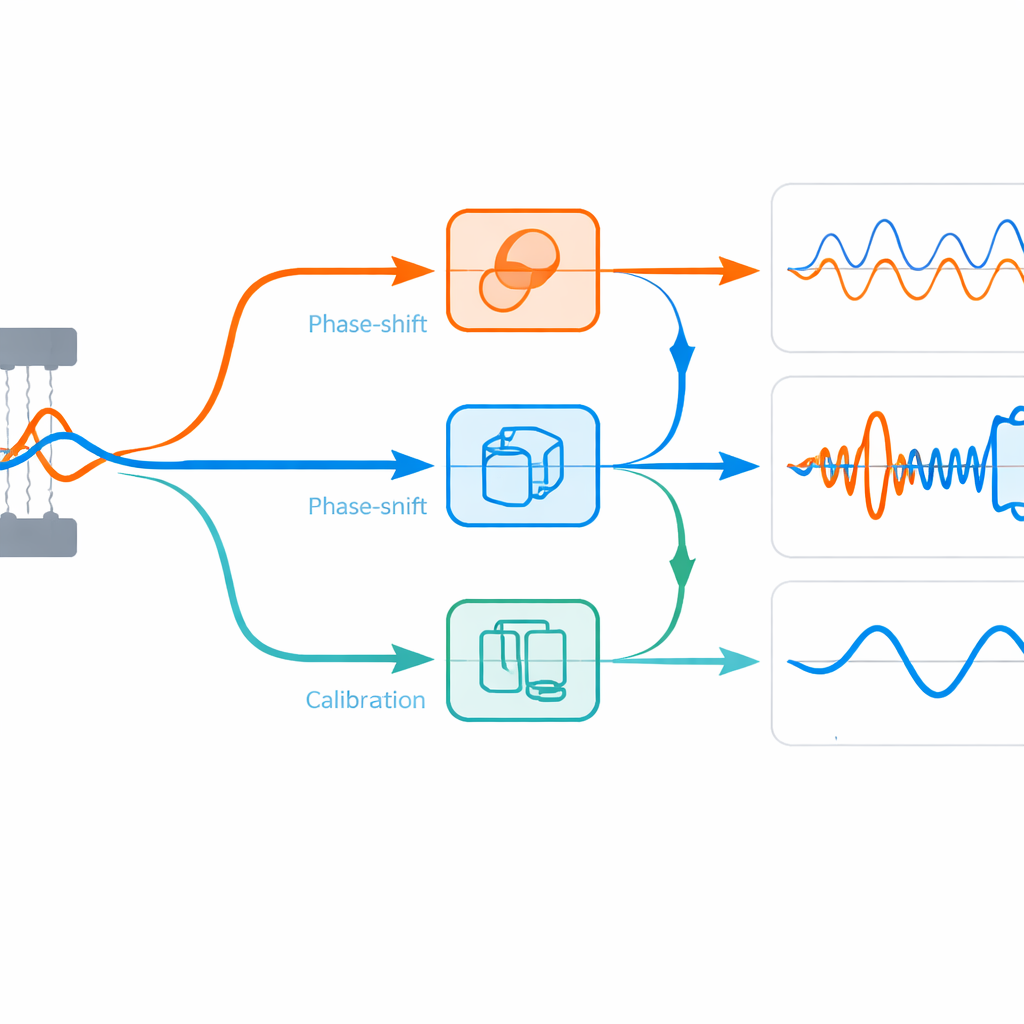
実際の装置では、信号は変化する静電容量を電圧に変換するアナログ回路、FPGA内部でのデジタル処理、そしてアナログとデジタルを橋渡しするデータ変換器を経由しなければなりません。これらの各段で信号の位相、つまりタイミングがわずかにずれる可能性があります。著者らは、これらの位相誤差を各振動経路で二つの単純なカテゴリに分けています:信号を測定・処理するときに発生する誤差(フィードバック経路)と、駆動信号を生成するときに発生する誤差(フォワード経路)です。次に彼らは、両モードの両経路を含むFTR制御ループの完全な数学モデルを構築し、そのような誤差がバイアス、スケールファクタ、帯域幅、そして四分相(quadrature)誤差として知られる不要な結合の打ち消し能力などの主要な性能指標にどのように影響するかを解析します。
駆動側の検証:ほとんど害はない
駆動側では、位相誤差によって制御ループが構造の真の固有振動数からわずかにずれた点でロックすることがあります。振幅を一定に保つために、電子回路は駆動振幅を増加させて応じます。直感的には、強い駆動は電気的フィードスルーとしてセンス経路に漏れる可能性があり懸念されます。しかし、本研究で扱うジャイロは高周波キャリアとリングダイオードを備えた慎重に設計されたフロントエンド回路を使用しており、この漏れを大部分で抑制します。シミュレーションと三つの温度下での詳細な実験により、装置が十分に暖まった後は駆動ループの位相誤差がほぼ一定値に収束し、簡単な較正を行えばバイアス、ノイズ、四分相補正、あるいはFTR帯域幅に与える影響は無視できることが示されます。
センス側のタイミング:本当の問題点
センスモードでは話が異なります。ここでは振動する質量に打ち返すフィードバックス信号と、速度成分および四分相信号を抽出するための参照信号が厳密に整合している必要があります。著者らは、センスのフィードバック経路に位相誤差を、フォワードの復調経路に別の位相誤差を明示的に含むFTRループモデルを導出します。解析的および実験的に示したところでは、フィードバック経路の位相誤差はスケールファクタ(真の回転と測定出力の変換)を直接変化させ、静止時に理想的には完全に安定であるはずのゼロ回転出力を悪化させます。これに対しフォワード経路の位相誤差はこれらの静的特性に対する影響が小さく、両方のセンス側誤差は動的な帯域幅にはほとんど影響を与えません。
最も重要なものを較正する
これらの知見に基づき、実用的な較正手順が提案されています。駆動モードについては、内部参照波と実際の駆動信号との位相差を測定し、信号が直交して駆動振幅が最小になるまでデジタル位相を調整して、フォワードおよびフィードバックの位相誤差の両方を明らかにして打ち消します。センスモードについてはまずフィードバック信号を参照に合わせて重要なフィードバック経路誤差を修正します。次に四分相信号を意図的に増幅してその位相を支配的にし、残るフォワード経路の位相を微調整しやすくします。温度を変えたテストでは、これらの補正は条件が変わると再推定が必要な定数オフセットのように振る舞いますが、一度設定すればスケールファクタとバイアスを大幅に安定化させます。
将来のセンサーにとっての意味
簡潔に言えば、本研究はMEMSジャイロの全てのタイミング誤差が同等に重要なわけではないことを示しています。フィードスルーが適切に抑えられている場合、駆動ループとセンスのフォワード経路の位相誤差は最終的な回転読み取りにほとんど影響しません。主要な問題はセンスのフィードバック経路にある位相誤差であり、それが回転を測るための“物差し”を直接歪め、静止時の読み取りをずらします。この弱点を特定し、対象を絞った較正手法を示すことで、本研究は走行中の安定性を向上させる設計指針を提供し、温度や他の条件が変化しても精度を維持できるリアルタイム補償方式への道を開きます。
引用: Jia, J., Zhang, H., Gao, S. et al. Phase error analysis for MEMS gyroscopes operational modes based on force-to-rebalance rate measurement mode. Microsyst Nanoeng 12, 86 (2026). https://doi.org/10.1038/s41378-025-01144-6
キーワード: MEMSジャイロスコープ, 力で再均衡する制御, 位相誤差, センサー較正, 慣性航法