Clear Sky Science · it
Mappatura probabilistica di occupazione ispirata al cervello con architetture simboliche vettoriali
Robot che vedono il mondo come un patchwork
Ogni auto a guida autonoma, robot di magazzino o aspirapolvere domestico ha bisogno di un rapido quadro mentale dell’ambiente: cosa è solido, cosa è vuoto e cosa è ancora sconosciuto. Questo articolo presenta un nuovo modo per costruire quell’immagine—chiamata mappa a griglia di occupazione—che prende in prestito idee da come il cervello potrebbe rappresentare l’informazione, con l’obiettivo di mantenere le mappe accurate rendendo al contempo i calcoli molto più veloci ed efficienti.
Trasformare i ping grezzi dei sensori in una mappa del mondo
I robot spesso usano scanner laser o altri sensori di distanza per sondare il mondo mentre si muovono, raccogliendo nuvole di punti su dove sono gli oggetti e dove lo spazio è libero. Una tecnica classica, la mappatura a griglia di occupazione, divide l’ambiente in celle minuscole, come pixel su uno schermo, e assegna a ciascuna una probabilità di essere occupata. I metodi tradizionali trattano questo come un pesante problema statistico, tracciando con cura l’incertezza ma consumando molto tempo e memoria. I metodi più recenti basati su reti neurali sono più veloci e sanno colmare i vuoti, ma si comportano come scatole nere, possono essere difficili da fidarsi in contesti critici per la sicurezza e di solito devono essere riaddestrati per ogni nuovo ambiente.
Una via di mezzo ispirata al cervello
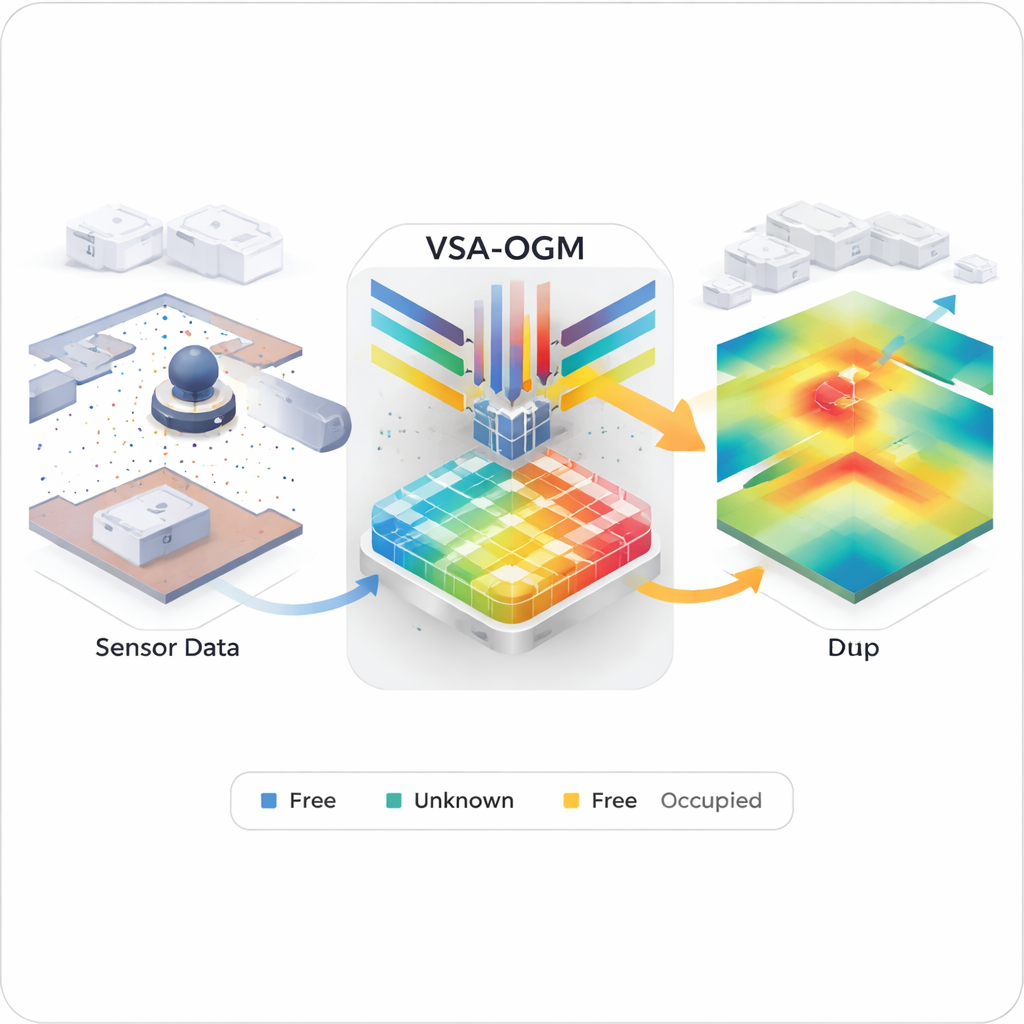
Gli autori propongono un compromesso “neuro-simbolico” chiamato VSA-OGM, acronimo di Vector Symbolic Architecture Occupancy Grid Mapping. Invece di memorizzare ogni dettaglio in una griglia densa o nascondere la struttura in milioni di pesi di una rete neurale, il metodo codifica le letture dei sensori come vettori molto lunghi in uno spazio ad alta dimensionalità—un’idea matematica ispirata alle teorie su come gruppi di neuroni potrebbero rappresentare concetti e posizioni. L’ambiente è suddiviso in tessere e ogni tessera ha memorie vettoriali per le evidenze di “occupato” e “vuoto”. Man mano che il robot si muove e raccoglie nuvole di punti, ogni osservazione viene convertita in uno di questi vettori iperdimensionali e aggregata nella memoria della tessera appropriata, accumulando informazioni nel tempo in modo efficiente.
Da vettori rumorosi a mappe chiare
Naturalmente, aggregare molti segnali in un’unica memoria ad alta dimensionalità rischia di creare un blob rumoroso e difficile da leggere. VSA-OGM affronta questo problema con una pipeline di decodifica progettata con cura. Prima confronta le memorie delle tessere con vettori che rappresentano posizioni nello spazio, producendo delle grezze “quasi-probabilità” di occupazione. Poi applica una serie di passaggi non lineari e uno strumento della teoria dell’informazione, l’entropia di Shannon, per mettere in evidenza dove i dati sostengono fortemente una classe rispetto all’altra. Infine usa una funzione softmax per convertire questi segnali in probabilità vere e le combina in una mappa finale che mostra la differenza firmata tra “occupato” e “vuoto”. Il risultato è una griglia di occupazione fluida che interpola attraverso regioni misurate in modo sparso restando pienamente probabilistica e interpretabile.
Mappe più veloci per un robot—o per molti
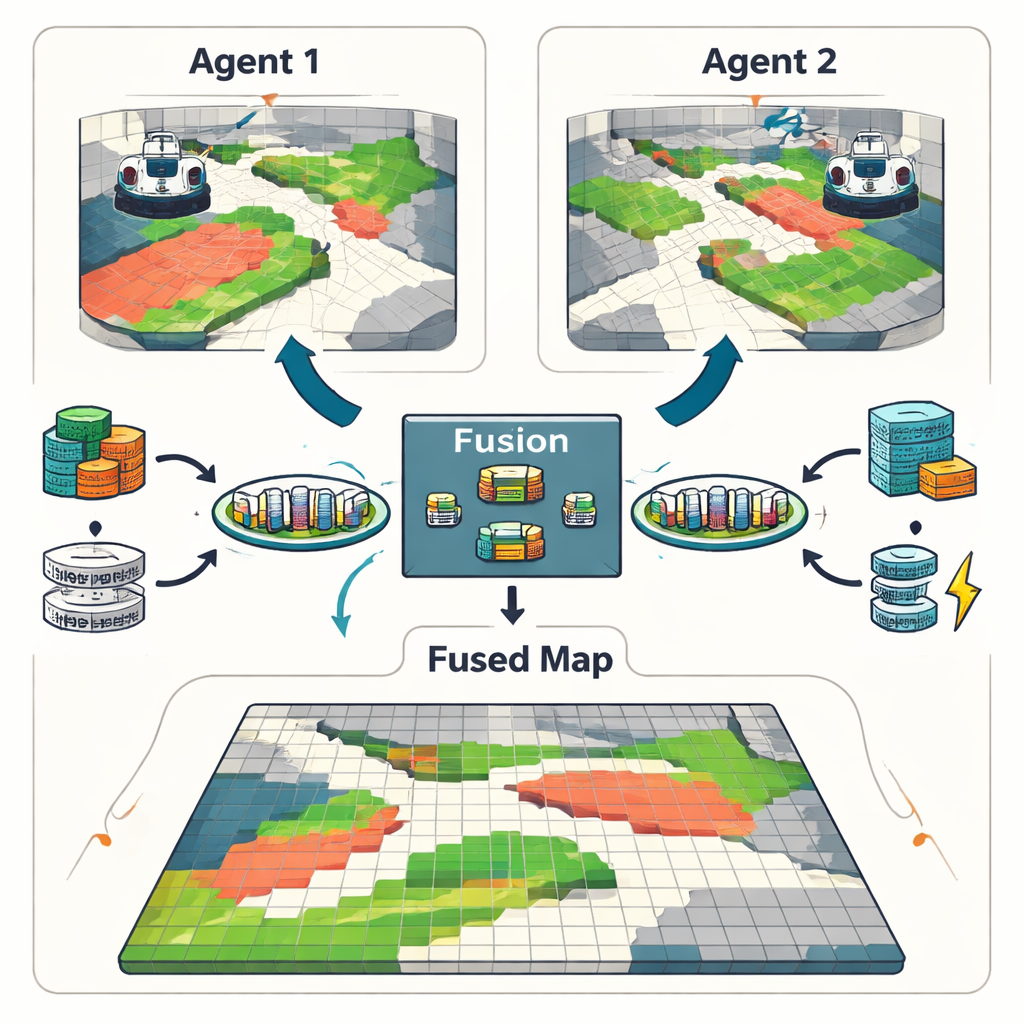
Per testare il loro approccio, i ricercatori hanno eseguito VSA-OGM su diversi dataset simulati e reali, inclusa una classica mappa robotica indoor e uno scenario di guida su larga scala. Rispetto a solidi baselines tradizionali che modellano accuratamente le correlazioni spaziali, VSA-OGM ha raggiunto una precisione di mappatura simile ma ha utilizzato circa 400 volte meno memoria e ha funzionato fino a 45 volte più velocemente. Confrontato con metodi tradizionali snelliti che sacrificano qualche dettaglio statistico, ha comunque pareggiato la precisione riducendo la latenza di circa un fattore cinque. Valutato rispetto a un sistema basato su rete neurale che richiede ore di addestramento e milioni di parametri, VSA-OGM ha fornito una qualità di mappatura comparabile senza preaddestramento e ha ridotto il tempo di elaborazione per frame fino a sei volte. Il framework supporta anche più robot: le memorie vettoriali di agenti diversi possono essere semplicemente sommate, producendo mappe fuse con poca perdita d’informazione.
Cosa significa per i robot di tutti i giorni
In termini pratici, questo lavoro mostra che i robot non devono scegliere tra matematica lenta ma affidabile e reti neurali veloci ma opache quando costruiscono mappe del mondo. Usando vettori ad alta dimensionalità ispirati al cervello, VSA-OGM conserva la chiara struttura probabilistica dei metodi classici raggiungendo al contempo la velocità e l’efficienza necessarie per l’operazione in tempo reale su hardware limitato. Rimangono sfide—come gestire dati estremamente disomogenei e ambienti molto densi—ma l’approccio indica la strada verso robot futuri che possono comprendere il loro intorno in modo sicuro e affidabile, anche correndo su modesti computer di bordo.
Citazione: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
Parole chiave: mappatura a griglia di occupazione, robot autonomi, architetture simboliche vettoriali, mappatura probabilistica, rilevamento LiDAR