Clear Sky Science · it
Prove comportamentali per l’esecuzione gerarchica dei movimenti sequenziali
Come il nostro cervello trasforma semplici movimenti in azioni fluide
Attività quotidiane come digitare su una tastiera, suonare una scala al pianoforte o prendere più oggetti su un tavolo sembrano effortless. Eppure, dietro le quinte, il cervello deve concatenare molti piccoli movimenti in azioni lisce e coordinate. Questo studio pone una domanda apparentemente semplice: il cervello pianifica sempre queste catene di azione come un unico movimento lungo, oppure le costruisce passo dopo passo, usando una gerarchia nascosta di blocchi costitutivi più piccoli?
Raggiungere grandi bersagli su un tavolo
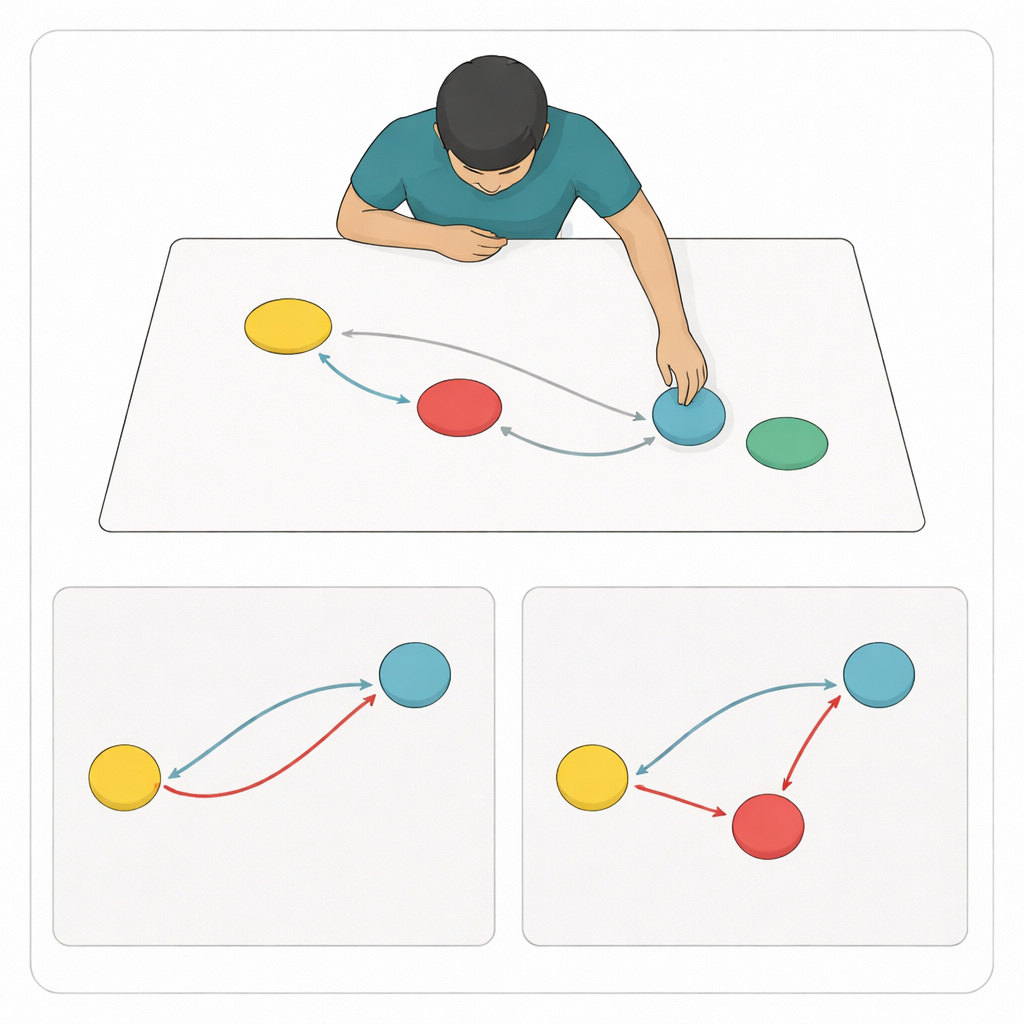
Per esplorare questa questione, i ricercatori hanno progettato un gioco da tavolo tipo “unisci i puntini” per la mano. Venti volontari si sono seduti a un tavolo con diversi cerchi colorati di grandi dimensioni stampati sulla superficie. Un cerchio di partenza era vicino al corpo, con altri cerchi posizionati a sinistra, a destra e sopra. In ogni prova, i partecipanti udivano un suono e dovevano muovere la punta dell’indice dal cerchio di partenza attraverso una breve sequenza di bersagli e poi tornare indietro, il più velocemente possibile ma senza estrema precisione: era sufficiente che la punta del dito atterrasse in qualsiasi punto all’interno di ciascun cerchio. Questo set-up a bassa precisione incoraggiava movimenti rapidi e fluidi, permettendo ai percorsi di piegarsi e fondersi tra i bersagli piuttosto che fermarsi bruscamente a ciascuno di essi.
Leggere i piani nascosti dalle curve della mano
Invece di misurare quanto tempo impiegassero o quante volte commettessero errori, il team si è concentrato sulla forma esatta di ciascun percorso della punta del dito. Hanno esaminato due caratteristiche chiave. Primo, la “curvatura intermedia”: quanto il percorso verso un bersaglio deviava verso il bersaglio successivo prima di raggiungerlo effettivamente. Secondo, la “curvatura attorno al bersaglio”: quanto il percorso cambiava direzione in modo brusco o graduale mentre passava vicino a un bersaglio. Insieme, questi modelli rivelano se un movimento verso un bersaglio sta già tenendo conto del bersaglio successivo—un effetto chiamato “coarticolazione”, simile a come la bocca modella i suoni futuri durante il parlato. Gli scienziati hanno confrontato queste curve misurate con i percorsi prodotti da due modelli computazionali di pianificazione del movimento, entrambi basati su teorie consolidate di controllo ottimo ma diversi nella struttura interna.
Piani piatti contro piani stratificati
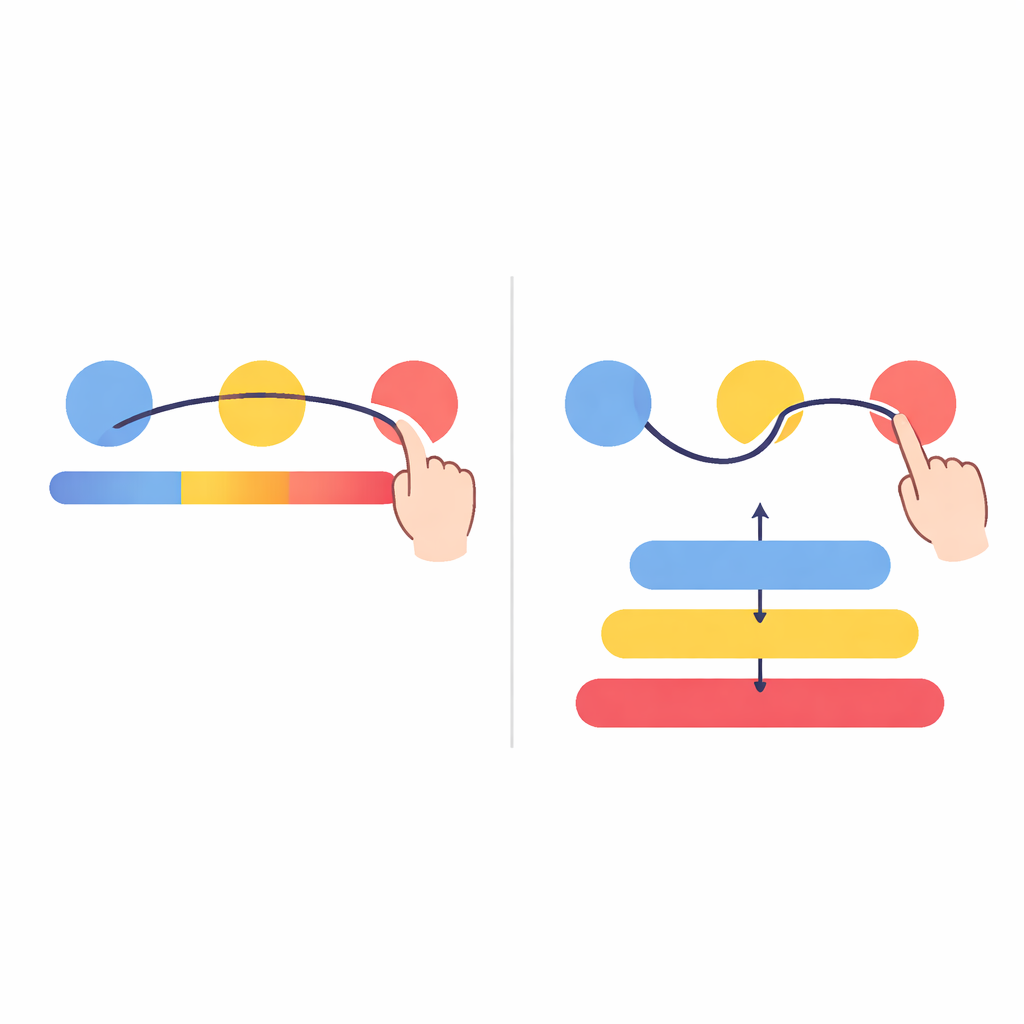
Nel modello “piatto”, si immagina che il cervello pianifichi l’intera sequenza di tre bersagli come un’unica traiettoria unificata prima che la mano inizi a muoversi. Ciò assomiglia a un gesto memorizzato o a un “chunk” eseguito in un’unica volta. In quel caso, la curvatura intermedia e la curvatura attorno ai bersagli sono strettamente legate: una volta che il pianificatore decide quanto puntare verso il primo bersaglio, determina in gran parte come appariranno le curve per l’intera sequenza. Il modello “gerarchico”, invece, aggiunge un semplice livello intermedio che unisce pezzi più piccoli—ad esempio un movimento due-berciali seguito da un ritorno a bersaglio singolo—al volo. Un sistema dinamico separato decide quando passare da un sotto-movimento al successivo, permettendo alla forma attorno a ogni bersaglio di essere regolata in modo più indipendente mantenendo comunque la fluidità complessiva del movimento.
Un comportamento che appare gerarchico
Quando i ricercatori hanno eseguito molte simulazioni, hanno scoperto che il modello piatto semplicemente non riusciva a generare alcune combinazioni di curvatura intermedia e curvatura attorno al bersaglio che i partecipanti umani producevano naturalmente. In particolare, le persone spesso mostravano una forte curvatura verso il secondo bersaglio nella prima parte del movimento, pur effettuando una svolta netta o con una forma diversa intorno a quel secondo bersaglio—schemi che il pianificatore piatto non riusciva a riprodurre. Il modello gerarchico, invece, riusciva a ricreare questi comportamenti misti collegando dinamicamente separati “sotto-movimenti” ai bersagli intermedi. Confrontando i dati reali con entrambi i modelli, gli autori hanno concluso che quasi la metà di tutte le sequenze di movimento registrate richiedevano chiaramente una spiegazione gerarchica, mentre altre erano compatibili con una pianificazione piatta, suggerendo che le persone cambiano strategia in modo flessibile a seconda della sequenza.
Cosa significa per le abilità di ogni giorno
I risultati suggeriscono che anche senza lunga pratica o routine altamente allenate, il nostro cervello spesso si affida a piani stratificati quando concatena semplici raggiungimenti. Piuttosto che comprimere sempre una sequenza in un singolo chunk rigido, il sistema motorio sembra conservare pezzi di movimento riutilizzabili e collegarli in tempo reale. Con l’allenamento, tali catene possono gradualmente collassare in azioni più piatte e pienamente “chunkate”, contribuendo a spiegare come le abilità diventino così rapide e automatiche. Questo lavoro fornisce una nuova finestra, basata sulla geometria, su come il cervello organizza il movimento, e potrebbe orientare ricerche future sull’apprendimento motorio, sulla riabilitazione e sulla progettazione di robot che si muovono con una grazia adattiva simile.
Citazione: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
Parole chiave: controllo motorio, pianificazione del movimento, raggruppamento, comportamento gerarchico, raggiungimento sequenziale