Clear Sky Science · it
Ancoraggio tramite frattura: l’impatto dinamico rende possibile un ancoraggio robotico prevedibile al ghiaccio d’acqua dolce
Arrampicare dove la gravità è quasi assente
Immaginate di dover scalare una parete di ghiaccio dove la gravità è così debole che il vostro stesso peso non aiuta gli scarponi a prendere. Questa è la sfida che affronteranno i robot inviati in futuro su lune ghiacciate come Encelado di Saturno, dove gli scienziati sperano di cercare segni di vita in profondi sbuffi e grotte di ghiaccio. Questo articolo descrive un nuovo modo per i robot di aggrapparsi al ghiaccio usando colpi rapidi simili a martellate e una stretta decisa, traendo ispirazione dai piccozzi degli alpinisti. Il risultato è un sistema di ancoraggio leggero che richiede molto meno forza ed energia rispetto agli attuali viti da ghiaccio o punte riscaldate, rendendo potenzialmente più accessibili mondi ghiacciati finora irraggiungibili.

Perché è così difficile tenere il ghiaccio
Sulla Terra, un alpinista può spingere con tutto il proprio peso su una vite da ghiaccio o un piccozza per farla mordere la superficie. Su Encelado la gravità è circa l’un percento di quella terrestre, quindi un robot non può contare sul proprio peso per premere gli attrezzi nel ghiaccio. Le soluzioni esistenti hanno ciascuna grandi svantaggi. Le viti da ghiaccio richiedono grandi forze di spinta per cominciare a mordere la superficie—tanto che, su Encelado, un robot potrebbe dover pesare quanto un grande rover marziano per usarle efficacemente. Le “punte termiche” riscaldate possono fondersi nel ghiaccio con pochissima spinta, ma consumano enormi quantità di energia ogni volta che vengono usate, un limite serio per veicoli spaziali operanti lontano dal Sole. Allo stesso tempo, molti robot moderni per l’arrampicata dipendono da asperità rocciose, suzione o adesivi speciali, tutti approcci che fanno fatica con le superfici lisce ma ondulate del ghiaccio glaciale naturale.
Prendere in prestito un trucco dagli scalatori umani
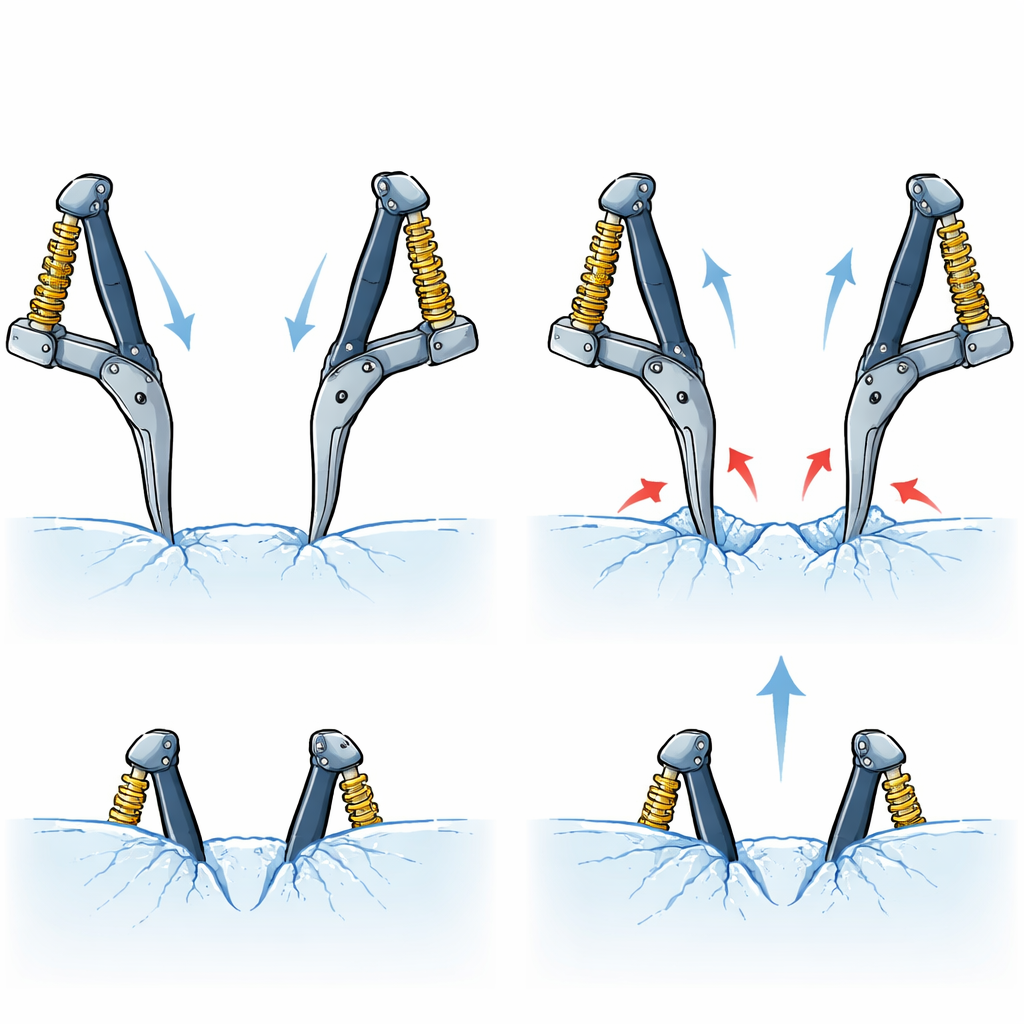
Gli autori propongono una strategia diversa: invece di adattarsi alla superficie del ghiaccio, creare i propri punti di presa. Il loro dispositivo usa due piccoli piccozzi montati su una pinza compatta. Prima, molle all’interno delle braccia vengono caricate immagazzinando una modesta quantità di energia meccanica. Quando rilasciate, i piccozzi oscillano come piccoli martelli e colpiscono il ghiaccio, scheggiando piccole cavità. Poi lo stesso meccanismo stringe i piccozzi l’uno verso l’altro in modo che le punte si aggancino nelle nuove rientranze. Questo processo in due fasi—impatto, poi presa—trasforma una porzione liscia di ghiaccio in qualcosa a cui il robot può aggrapparsi, ed è facilmente reversibile così che il robot possa fare un altro “passo”. L’intero ciclo è azionato da un unico motore che sia carica le molle sia serra la presa.
Testare la fisica dietro la presa
Per assicurarsi che l’approccio funzionasse in modo affidabile, il team ha costruito modelli matematici di quanto in profondità le punte dei piccozzi avrebbero penetrato e di quanta energia di rimbalzo potessero avere dopo l’impatto. Hanno poi testato singoli piccozzi oscillanti come pendoli contro blocchi di ghiaccio d’acqua dolce raffreddati a temperature tipiche dei ghiacciai. Confrontando teoria ed esperimento hanno scoperto che i loro modelli potevano prevedere la profondità delle cavità e stimare l’energia di “recoil” quando il piccozza rimbalza. Usando questi risultati, hanno calcolato quanto forte un robot deve premere la pinza contro il ghiaccio prima di colpire, in modo che i piccozzi rimangano nelle nuove cavità invece di rimbalzare fuori. Per l’energia della molla scelta, il modello prevedeva che circa 16 newton di spinta—all’incirca il peso di un paio di litri d’acqua sulla Terra—assicurassero un successo quasi certo.
Dal banco di laboratorio alla parete del ghiacciaio
Con i modelli a disposizione, i ricercatori hanno testato la pinza completa a doppio piccozza. In laboratorio hanno confermato che impatti con energia immagazzinata nelle molle di 8 joule potevano creare cavità sufficientemente profonde richiedendo molta meno spinta iniziale rispetto alle viti da ghiaccio e un’energia di gran lunga minore rispetto agli ancoraggi termici. Hanno poi misurato la resistenza della presa tirando il dispositivo direttamente fuori dal ghiaccio. Regolando quanto strettamente i piccozzi si serravano l’uno verso l’altro, hanno identificato due modalità di fallimento della presa: a bassa compressione le punte scivolavano fuori dalle cavità; a compressione molto alta si staccavano i lembi di ghiaccio stessi. Tra questi estremi c’era una zona ottimale in cui la pinza poteva sostenere più del doppio del proprio peso. Test sul campo su un ghiacciaio francese hanno mostrato che il dispositivo poteva ancorarsi su ghiaccio naturale ripido, neve dura e persino su tronchi, rocce e terreno compatto, confermando che il metodo impatto-e-presa funziona anche fuori dal laboratorio.
Cosa significa per i futuri esploratori
Lo studio mostra che spezzare e pizzicare il ghiaccio può essere un modo molto efficiente per i robot di arrampicare e mantenersi stabili in ambienti ostili a bassa gravità. Sfruttando il fatto che frantumare il ghiaccio richiede molta meno energia che fonderlo, la pinza a doppio piccozza forma ancoraggi forti e reversibili usando forze modeste e solo pochi joule di energia per passo. Per missioni verso Encelado o altri mondi ghiacciati, un sistema del genere potrebbe permettere a robot piccoli e con limiti energetici di scendere in sicurezza in bocche fumarole o restare appesi alle pareti scoscesi mentre campionano materiali che potrebbero rivelare se la vita esiste oltre la Terra. La stessa idea potrebbe anche aiutare robot terrestri a esplorare ghiacciai, grotte di ghiaccio e pareti di roccia friabile troppo pericolose o inacessibili per scalatori umani.
Citazione: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
Parole chiave: arrampicata robotica sul ghiaccio, esplorazione planetaria, pinze robotiche, ancoraggio per frattura del ghiaccio, missioni su Encelado