Clear Sky Science · it
Pianificazione concreta dei percorsi multi-agente che consente manovre kino-dinamicamente aggressive
Robot che sanno danzare nel traffico
Immaginate dozzine di robot volanti e terrestri sfrecciare in un magazzino, senza mai urtarsi e completando i loro compiti più in fretta di quanto potrebbe fare un operatore umano. Questo articolo descrive un nuovo modo di coreografare questo «traffico» di robot in modo che molte macchine possano muoversi con aggressività e rapidità in spazi ristretti pur restando sicure. Il lavoro è rilevante perché le stesse idee potrebbero un giorno alimentare flotte di robot in fabbriche, magazzini e servizi di consegna che devono operare ininterrottamente nel nostro mondo quotidiano.
Perché radunare molti robot è così difficile
Coordinare una folla di robot è molto più complicato che guidarne uno solo. Ogni robot deve andare dal punto di partenza all’obiettivo senza schiantarsi, bloccare gli altri o rimanere intrappolato in loop infiniti. Gli approcci odierni tendono a collocarsi a due estremi. Alcuni metodi trattano i robot come pedine su una griglia, il che rende la pianificazione per centinaia di unità veloce e matematicamente ordinata—ma i percorsi risultanti spesso ignorano come le macchine reali si muovono, accelerano o sterzano. Altri metodi simulano la dinamica completa e producono traiettorie belle e fluide, ma diventano dolorosamente lenti o inaffidabili quando il numero di robot supera una manciata.
Una via di mezzo: pianificazione «concreta»
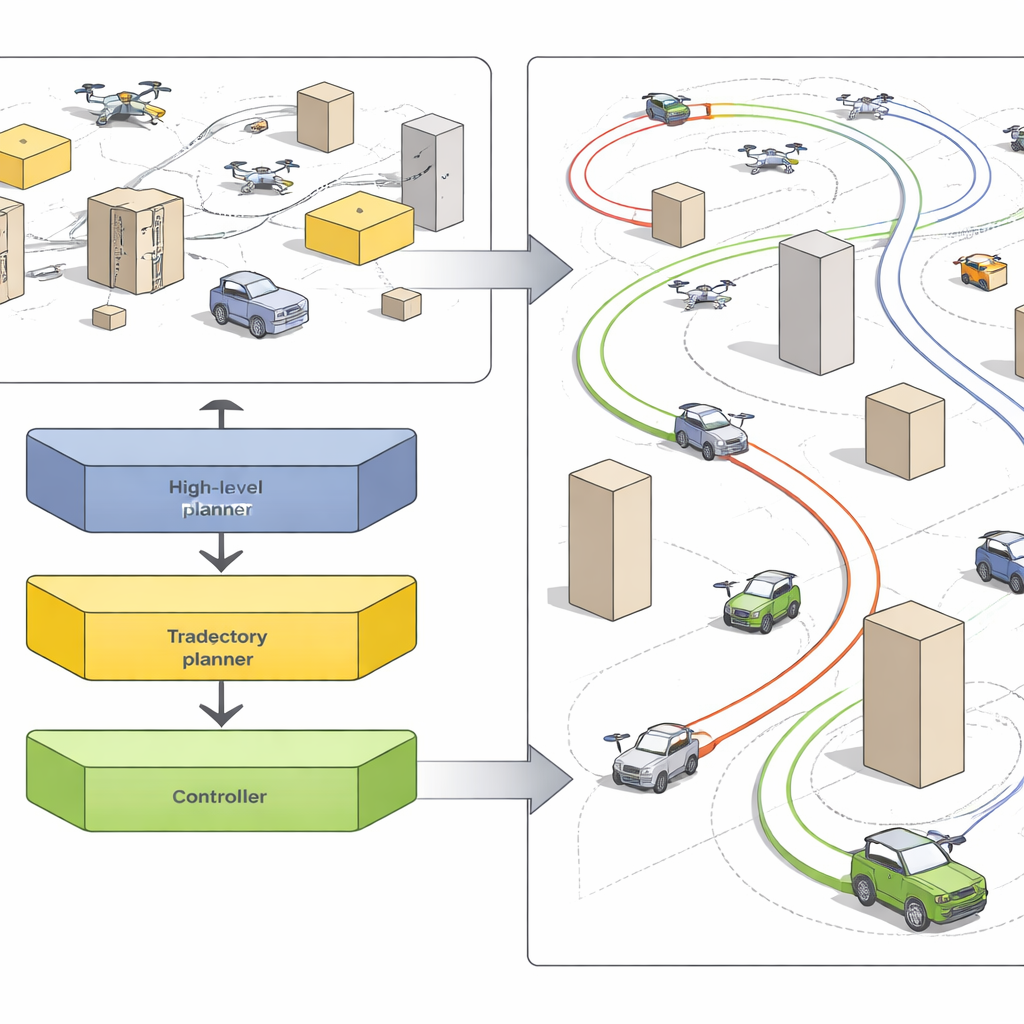
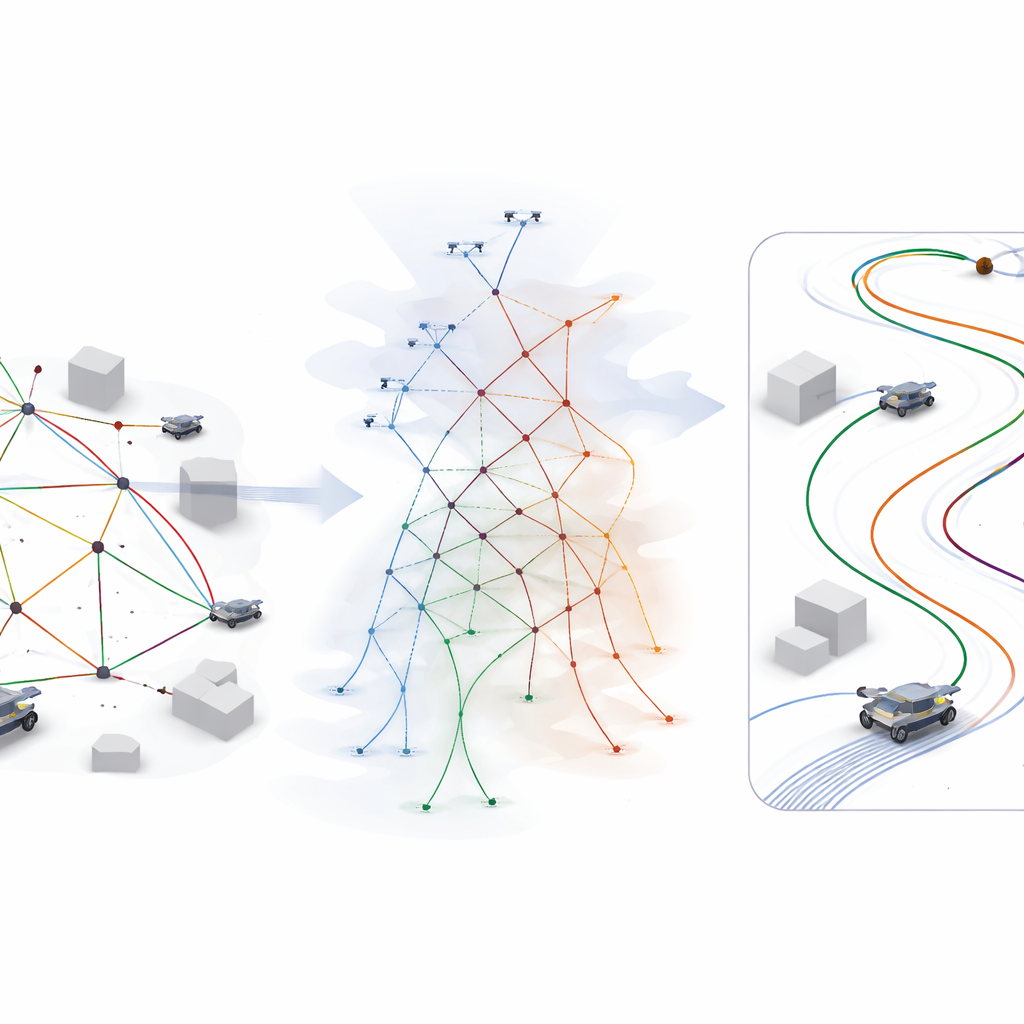
Gli autori propongono una strategia ibrida che chiamano pianificazione dei percorsi multi-agente «concreta». L’idea è fondere la struttura nitida della pianificazione a griglia con un quadro realistico di come i robot si muovono realmente. Invece di operare puramente su una griglia astratta o in una fisica completamente continua, il sistema utilizza una descrizione stratificata del moto. Un pianificatore centrale esplora un insieme discreto di mosse possibili per tutti i robot contemporaneamente, ma ogni mossa è arricchita da previsioni su quanto tempo richiederà, su come il robot potrebbe deviare dalla traiettoria prevista e su quanto vicino può passare ad altri in sicurezza. Queste predizioni derivano da modelli basati su dati addestrati su esperimenti con robot reali, così il pianificatore «sa» come la sua flotta tende a comportarsi nella pratica.
Da schizzi approssimativi a movimenti precisi
Una volta che il pianificatore accoppiato ha prodotto sequenze di waypoint sicure e privi di conflitti per ogni robot, il framework si avvicina ai dettagli. Un secondo modulo trasforma ogni percorso grezzo in una traiettoria densa e fluida che rispetta i limiti di spinta, sterzata e altri fattori fisici. Per farlo rapidamente, gli autori hanno prima usato una pesante ottimizzazione numerica offline per generare molti esempi di moto quasi ottimale in tempo, poi hanno addestrato reti neurali basate su transformer a imitare quegli esempi. In fase di esecuzione, queste reti possono generare percorsi di riferimento di alta qualità in meno di un millisecondo. Un terzo livello, un controllore predittivo modello dotato di un filtro di sicurezza, regola costantemente i comandi per seguire questi riferimenti e usa il sensing locale per schivare sorprese, come un ostacolo fuori traiettoria o un lieve errore di inseguimento.
Mettere alla prova quaranta robot
Il team ha dimostrato il sistema con una flotta mista di 20 droni quadrotore, 8 robot terrestri e 12 robot che agivano come ostacoli mobili, tutti operanti insieme in un’arena indoor di dimensioni di una stanza. In una serie di esperimenti, sciami di droni hanno sfrecciato attraverso spazi ristretti a velocità di punta superiori a cinque metri al secondo evitando reciprocamente in una sorta di balletto tridimensionale. In un altro scenario, robot terrestri hanno attraversato ripetutamente un’area ingombrata con ostacoli in movimento casuale, completando più missioni, con meno soste e senza collisioni, rispetto ai metodi concorrenti. Le prove più impegnative hanno coinvolto tutti i 40 robot eseguire più missioni in sequenza, con il sistema che ripianificava continuamente i percorsi su richiesta senza stalli o incidenti.
Spunti per futuri sistemi di consegna e magazzino
Per mostrare come questo possa tradursi in compiti del mondo reale, gli autori hanno messo in scena consegne simulate dell’«ultimo miglio» e operazioni di magazzino. Nello scenario di consegna, robot terrestri trasportavano i droni fino a una «riva», dove i droni decollavano, volavano verso punti di consegna sparsi, tornavano alle basi mobili e poi rientravano nell’area di partenza—il tutto evitando ostacoli in movimento. Nel mockup di magazzino, squadre di droni hanno trasportato ripetutamente pacchi virtuali tra scaffali e zone di spedizione, mantenendo movimenti densi e agili e un’elevata produttività. Questi casi di studio hanno richiesto solo una messa a punto minima del framework, sottolineandone la capacità di adattarsi a nuove piattaforme e missioni.
Cosa significa per il futuro
In termini semplici, questo lavoro dimostra che è possibile far muovere grandi team di robot in modo al contempo audace e sicuro in spazi ristretti e dinamici combinando con cura pianificazione di alto livello veloce, modelli di moto realistici e controlli di sicurezza come ultima risorsa. L’approccio «concreto» trasforma piani astratti in movimenti che macchine reali possono eseguire ad alta velocità, pur fornendo garanzie contro collisioni e stalli in molti scenari pratici. Sebbene ambienti estremamente caotici e spazi completamente sconosciuti restino sfide, il framework indica una direzione futura in cui flotte di droni per consegne, robot da magazzino e altri lavoratori robotici possono condividere ambienti affollati senza supervisione umana costante.
Citazione: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
Parole chiave: coordinamento multi-robot, pianificazione dei percorsi, sciami di robot, automazione dei magazzini, consegna con droni