Clear Sky Science · it
Strategia adattiva ispirata agli insetti per compensare deficit sensoriali olfattivi nella localizzazione di sorgenti di odore da parte di robot
Perché perdere un sensore non significa perdere la traccia
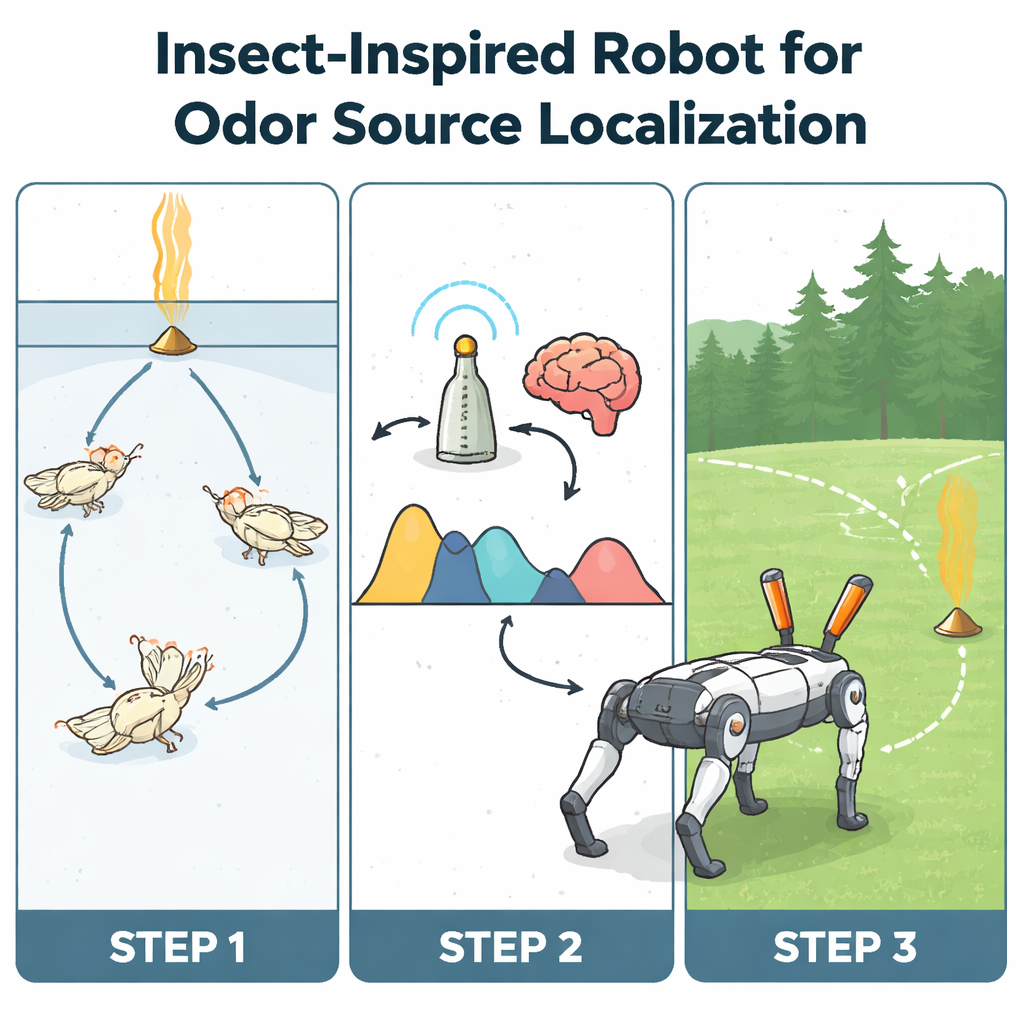
Immaginate un robot da soccorso che cerca di fiutare una perdita di gas o un sopravvissuto intrappolato in un edificio crollato—e poi uno dei suoi sensori chiave si guasta. I robot odierni spesso falliscono in modo drastico in queste condizioni. Questo studio si ispira a un sorprendente esperto della navigazione basata sull’olfatto, il maschio della falena del baco da seta, per mostrare come gli animali possano continuare a rintracciare una sorgente di odore anche dopo aver perso metà del loro “naso” e come quella strategia possa essere replicata in robot quadrupedi.
Un piccolo navigatore con un olfatto potente
Molti animali—dagli insetti ai cani—usano segnali chimici trasportati dall’aria per trovare cibo, partner o rifugi sicuri. Gli odori sono particolarmente utili quando la vista è ostruita da oscurità, fumo o macerie. Ma le vere scie odorose sono disordinate: il vento cambia, edifici e alberi deformano il flusso e l’intensità maggiore non è sempre direttamente a monte della sorgente. La maggior parte dei robot che cercano odori presume che tutti i loro sensori olfattivi funzionino perfettamente e che direzione del vento e del gradiente d’odore coincidano nettamente. In natura nessuna di queste ipotesi è valida. Il baco da seta Bombyx mori offre un controesempio naturale: i maschi possono localizzare le femmine che rilasciano feromoni sessuali anche in aria turbolenta e, cosa intrigante, persino quando una delle loro due antenne—i principali organi olfattivi—viene rimossa.
Come le falene si adattano dopo la perdita di un’antenna
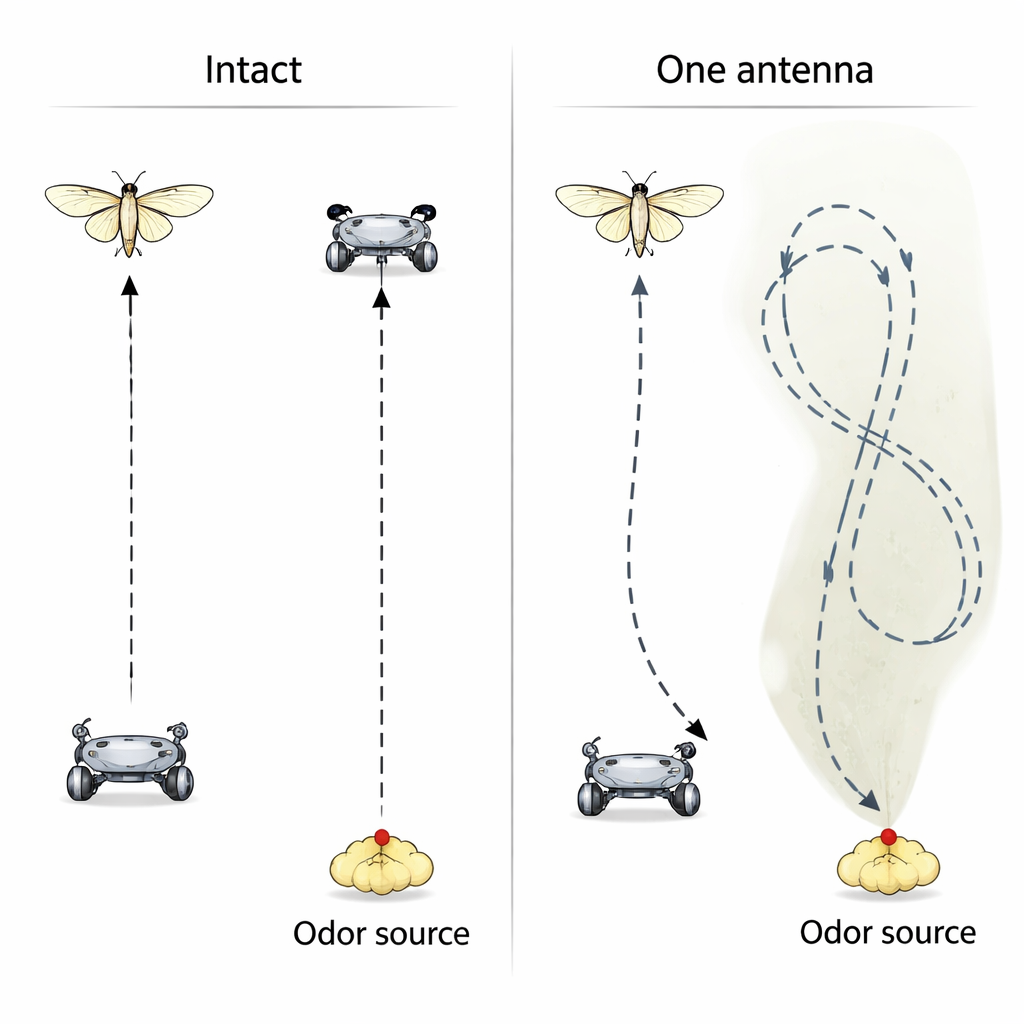
I ricercatori hanno prima testato quanto bene i maschi intatti e quelli privati dell’antenna sinistra riuscissero a camminare verso una sorgente odorosa in laboratorio. Entrambi i gruppi partivano da 15 centimetri di distanza da un punto che emetteva feromone. Sorprendentemente, il tasso di successo—raggiungere la sorgente entro un minuto—non è diminuito in modo significativo dopo la rimozione di un’antenna. Ciò che è cambiato è stato il percorso: le falene intatte tendevano a marciare lungo una rotta relativamente rettilinea, mentre le falene con una sola antenna impiegavano percorsi più lunghi e tortuosi, curvandosi verso il lato dell’antenna rimasta. Misurazioni dettagliate dei movimenti della testa hanno rivelato che le falene cambiavano strategia di virata a seconda di dove, lungo l’antenna rimasta, veniva rilevato l’odore—vicino alla base o vicino all’estremità—e della direzione in cui stavano virando in quel momento.
Due regole semplici nascoste in un comportamento complesso
Pulsando ripetutamente l’odore a sinistra e a destra e tracciando gli angoli della testa delle falene, il team ha convertito il comportamento in curve di probabilità che mostrano quanto fosse probabile che una falena virasse a sinistra o a destra dopo ogni sbuffo. Quando un odore colpiva vicino alla base dell’antenna, la falena mostrava una forte tendenza a continuare a ruotare verso lo stesso lato, impegnandosi di fatto a seguire la virata in corso. Quando l’odore colpiva vicino alla punta, la scelta diventava più bilanciata, con un leggero bias a esplorare il lato opposto. In sintesi, la perdita dell’antenna non induceva la falena ad arrendersi; la portava ad adottare un modello di ricerca che campiona più ampiamente entrambi i lati dello spazio, specialmente lungo il “bordo” della scia odorosa dove l’intensità dell’odore varia rapidamente.
Addestrare un robot quadrupede a fiutare come una falena
Successivamente i ricercatori hanno costruito un robot quadrupede dotato di dispositivi sensoriali per gli odori sulla sua “testa”, disposti per imitare la struttura base–punta di un’antenna. Hanno creato due algoritmi di ricerca. Il primo, un approccio standard ispirato alle falene chiamato SZL (per surge–zigzag–loop), presume due sensori odorosi funzionanti e sceglie la direzione del suo “surge” rettilineo dal timing relativo delle rilevazioni di sinistra e destra. Il secondo, chiamato context-dependent moth-inspired (CDMI), incorpora le nuove regole derivate dalle falene: stima dove, lungo il sensore rimasto, è stato rilevato l’odore e usa le curve di probabilità ottenute dagli esperimenti sugli animali per decidere in quale direzione muoversi e con quale intensità girare. Nei test in ambienti chiusi, SZL funzionava meglio quando entrambi i sensori erano integri, permettendo percorsi rapidi e relativamente diritti. Ma quando un sensore veniva disabilitato, CDMI ha nettamente superato SZL, trovando la sorgente più spesso seguendo il bordo variabile del campo odoroso in traiettorie ad anello simili a quelle delle falene con una sola antenna.
Robot che restano efficaci quando qualcosa si rompe
Per spingere l’idea oltre, il team ha testato i robot all’aperto, dove il vento naturale e la turbolenza rendono le scie odorose altamente frammentarie. Hanno dotato il robot intatto dell’algoritmo convenzionale SZL e il robot “monosensore” dell’algoritmo CDMI. Entrambi hanno raggiunto tassi di successo comparabili, ma il robot danneggiato che utilizzava la strategia adattativa ispirata alle falene spesso trovava la sorgente con percorsi più brevi e meno tortuosi. Questo suggerisce che in condizioni difficili e reali può essere preferibile passare da uno schema di rilevamento preciso ma fragile a una strategia più esplorativa che segue i bordi. Il messaggio più ampio è che una navigazione robusta non richiede intelligenze artificiali sempre più complesse. Regole semplici e ancorate alla biologia—legate a come i sensori sono disposti sul corpo e a come il corpo interagisce con l’ambiente—possono aiutare a creare robot che continuano a funzionare anche quando parti chiave si guastano, una proprietà cruciale per missioni di esplorazione e soccorso di lunga durata.
Citazione: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
Parole chiave: navigazione olfattiva, robotica bioispirata, localizzazione della sorgente odore, IA ispirata agli insetti, intelligenza incorporata