Clear Sky Science · it
Pinza reattiva al tatto con un palmo attivo per la manipolazione dexterosa
Robot che possono percepire ciò che tengono
Immaginate un robot capace di cogliere delicatamente una fragola matura, svitare il tappo di una bottiglia a prova di bambino o avvitare una lampadina sopra la testa—tutto senza schiacciare, far cadere o disallineare nulla. Questo articolo descrive una nuova pinza robotica che avvicina le macchine a questo livello di abilità manuale simile a quella umana, dotando il robot non solo di dita intelligenti, ma anche di un palmo attivo e altamente sensibile.
Un palmo che fa più che semplicemente sorreggere
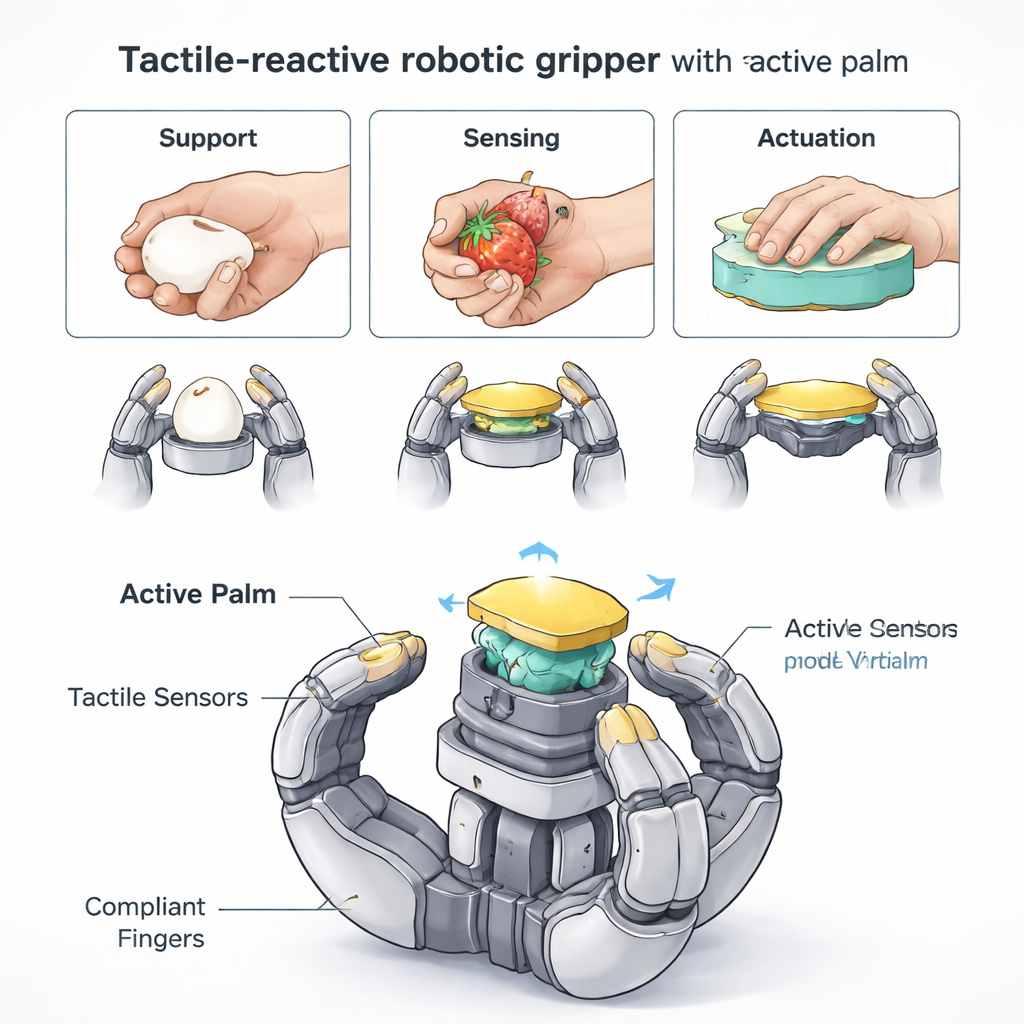
La maggior parte delle mani robotiche attuali ha o robuste e rigide chele in grado solo di afferrare, o mani multifalange molto complesse da costruire e controllare. Un'intuizione chiave di questo lavoro è che la mano umana si affida molto al palmo—non solo alle dita—per sostegno, percezione e spinta. I ricercatori hanno progettato una pinza robotica a tre dita con un palmo centrale che può muoversi verticalmente e che è ricoperto da un sensore tattile basato su telecamera. Anche ogni polpastrello ha una propria piastrella sensibile alla pressione e flessibile. Insieme, queste componenti permettono alla pinza di sentire dove e come tocca un oggetto e di adattare la presa in tempo reale, pur usando nel complesso solo sette giunti mobili.
Movimenti semplici, molteplici modi di afferrare
Le tre dita identiche della pinza possono muoversi ad arco e flettersi, consentendo diversi stili di presa quotidiani: caging di oggetti grandi come palle, pizzicare oggetti sottili come carte e serraggio di utensili pesanti con una presa di potenza. La struttura morbida, simile a una colonna vertebrale delle dita, avvolge naturalmente oggetti di forme diverse senza programmazione dettagliata. Nel frattempo, il palmo scorre verticalmente come un ascensore, così può premere contro un oggetto, condividere il carico con le dita o spostare la posizione dell’oggetto nella mano. Simulazioni ed esperimenti mostrano che anche con solo due giunti per dito più il palmo mobile, la mano può muovere gli oggetti in molte direzioni ed evitare pose goffe difficili da controllare.
Percepire con dita e palmo
Per capire cosa sta tenendo, la pinza combina tre tipi di percezione: immagini tattili dettagliate provenienti dal palmo, mappe di pressione dai polpastrelli e letture degli angoli dei propri giunti. Un sistema di apprendimento automatico fonde questi segnali, dando più peso ai suggerimenti più utili per un dato oggetto. Nei test con lattine e palle di diverse dimensioni e materiali, il sistema è stato in grado di riconoscere ciò che teneva con quasi il 99% di accuratezza. Questa ricca sensibilità tattile guida anche quanto stringere, quando smettere di chiudere le dita e come muovere il palmo per mantenere il contatto stabile senza generare attrito eccessivo.
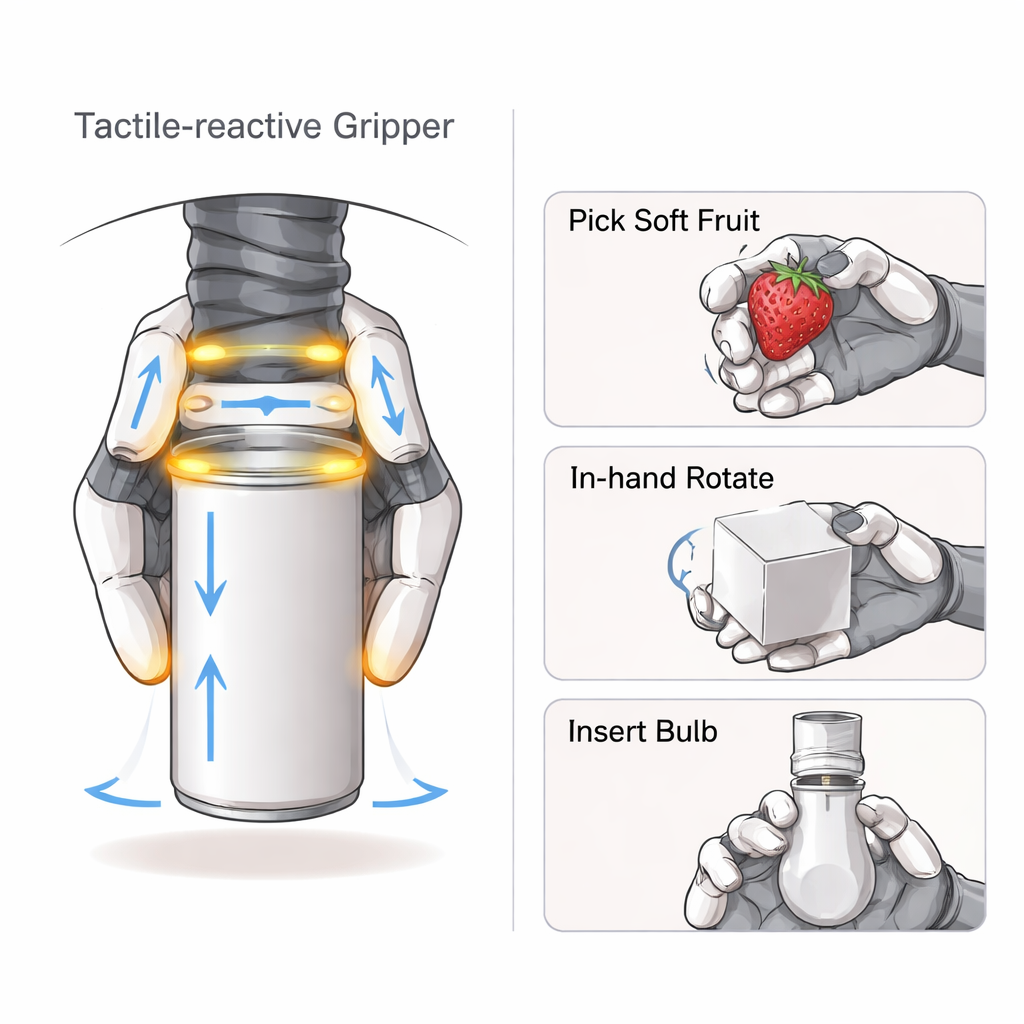
Dagl’oggetti di prova alla frutta e alle lampadine
Il team ha sottoposto la pinza a un benchmark di presa robotica ampiamente usato con oggetti di uso quotidiano come palle, utensili e piccole parti di ferramenta. Ha ottenuto punteggi superiori rispetto a diverse pinze di ricerca note, pur usando meno parti mobili. Oltre ai set di prova, la pinza ha dimostrato di poter raccogliere frutti delicati—fragole, uva, pomodori e altri—senza danni visibili anche giorni dopo, verificato con luce ultravioletta. È stata inoltre in grado di traslare e ruotare blocchi e cilindri con precisione nella mano, avvitare una lampadina in una presa rivolta verso l’alto, spingere lo stantuffo di una siringa tenendo il corpo, e aprire tappi a prova di bambino premendo e ruotando. In molti di questi compiti, il palmo mobile ha fornito la spinta, il supporto o la sensibilità in più che manca alle pinze con sole dita.
Perché è importante per i robot del futuro
Il lavoro dimostra che i robot non hanno sempre bisogno di più dita o giunti per essere abili. Coordinando con cura poche dita compliant con un palmo controllato attivamente e sensibile al tatto, questa pinza raggiunge un equilibrio di forza, delicatezza e consapevolezza che comincia ad assomigliare alla mano umana. Poiché le parti sono in gran parte stampate in 3D e utilizzano sensori commerciali, il progetto è relativamente facile da riprodurre. Con un controllo basato sull’apprendimento ancora più sviluppato, pinze simili potrebbero aiutare i robot a gestire la spesa, assistere nelle cure domiciliari o lavorare in sicurezza con le persone nelle fabbriche—sensi certi di ciò che fanno, invece di affidarsi solo a ipotesi.
Citazione: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
Parole chiave: pinza robotica, sensibilità tattile, manipolazione dexterosa, mano robotica, palmo attivo