Clear Sky Science · it
Sfruttare la propriocezione in ali morbide acquatiche permette una rigettazione ibrida passivo-attiva delle perturbazioni
Ali intelligenti sott’acqua
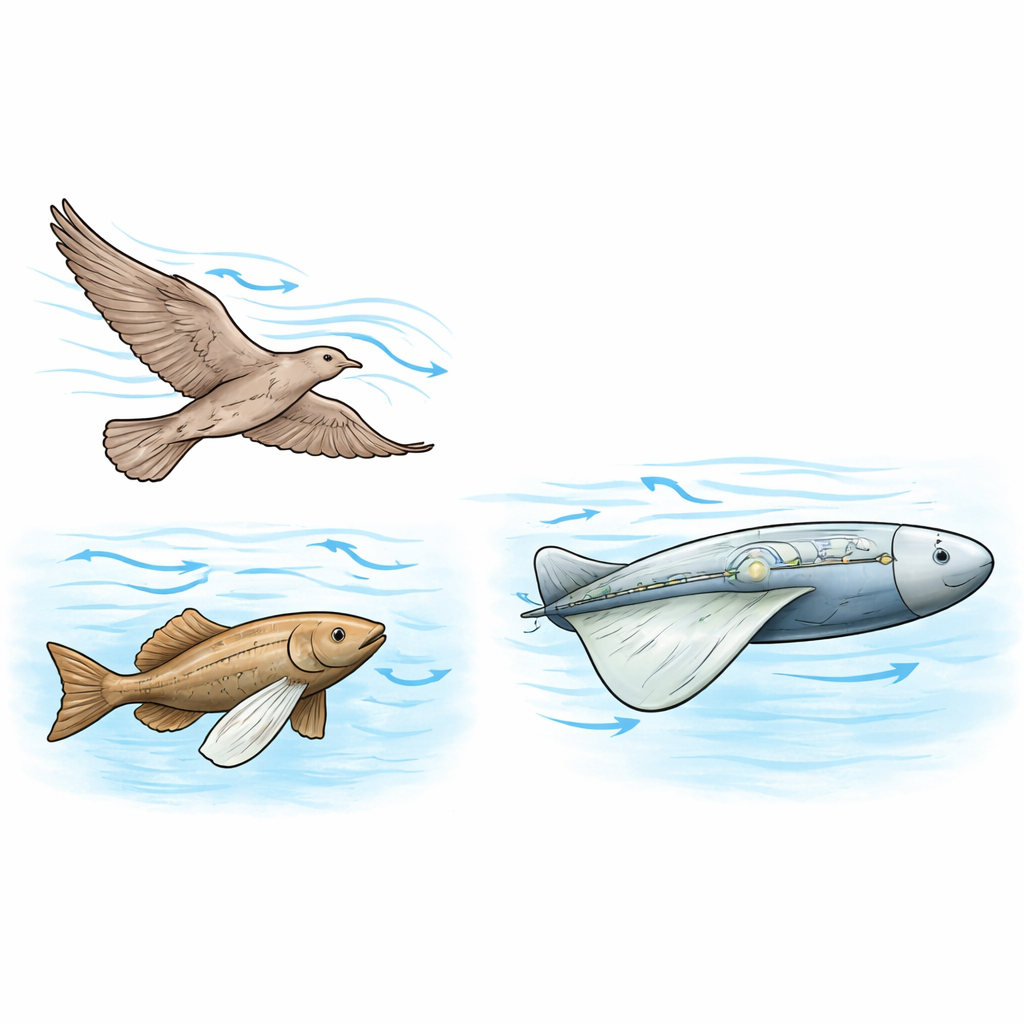
Chiunque abbia visto un uccello stazionare in un vento turbolento o un pesce rimanere fermo in una corrente impetuosa ha osservato come la natura risolva un problema ingegneristico difficile: come mantenere la rotta quando il fluido circostante non collabora. Questo studio mostra come un nuovo tipo di ala subacquea morbida, dotata di un “senso di sé” simile alla propriocezione animale, possa percepire automaticamente cambiamenti improvvisi del flusso e rimodellarsi per restare stabile. Il lavoro apre la strada a futuri robot subacquei che planano più come gli animali e meno come macchine rigide, risparmiando energia mentre affrontano mari agitati.
Imparare da uccelli e pesci
In natura, ali e pinne non sono lame rigide; si piegano, si torsionano e flessano. Gli uccelli percepiscono il moto dell’aria tramite minuscoli recettori nelle piume, mentre i pesci usano cellule sensibili alla pressione lungo il corpo e nei raggi delle pinne. Questi sensori integrati permettono agli animali di avvertire come i loro appendici si deformano in aria o acqua in movimento e di reagire quasi istantaneamente, respingendo raffiche e turbolenze. Al contrario, la maggior parte dei veicoli subacquei impiega superfici di controllo rigide e strumenti separati per misurare il flusso, rendendoli lenti e assetati di energia quando l’ambiente diventa caotico. Gli autori sostengono che combinare flessibilità e sensorizzazione in un’unica struttura morbida potrebbe ridurre questo divario.
Un’ala morbida con sensi integrati
Il team ha costruito mezza ala per uso subacqueo che unisce una coda morbida e flessibile a un naso rigido. All’interno della sezione morbida corrono tubi gonfiabili riempiti di liquido, che possono essere pressurizzati per modificare la curvatura dell’ala, cioè il camber. All’esterno hanno incollato una sottile “pelle” elettronica fatta di silicone con fili di metallo liquido. Quando l’ala si flette, la distanza tra questi conduttori sepolti cambia, alterando la loro capacità elettrica. Addestrando un semplice modello di apprendimento automatico a far corrispondere questi segnali alle forme tracciate da telecamere, i ricercatori hanno trasformato l’e-skin in un sensore di forma ad alta precisione. Una volta addestrato, il sistema può stimare il camber dell’ala in tempo reale senza telecamere esterne, anche mentre è immerso.
Trasformare la forma in controllo
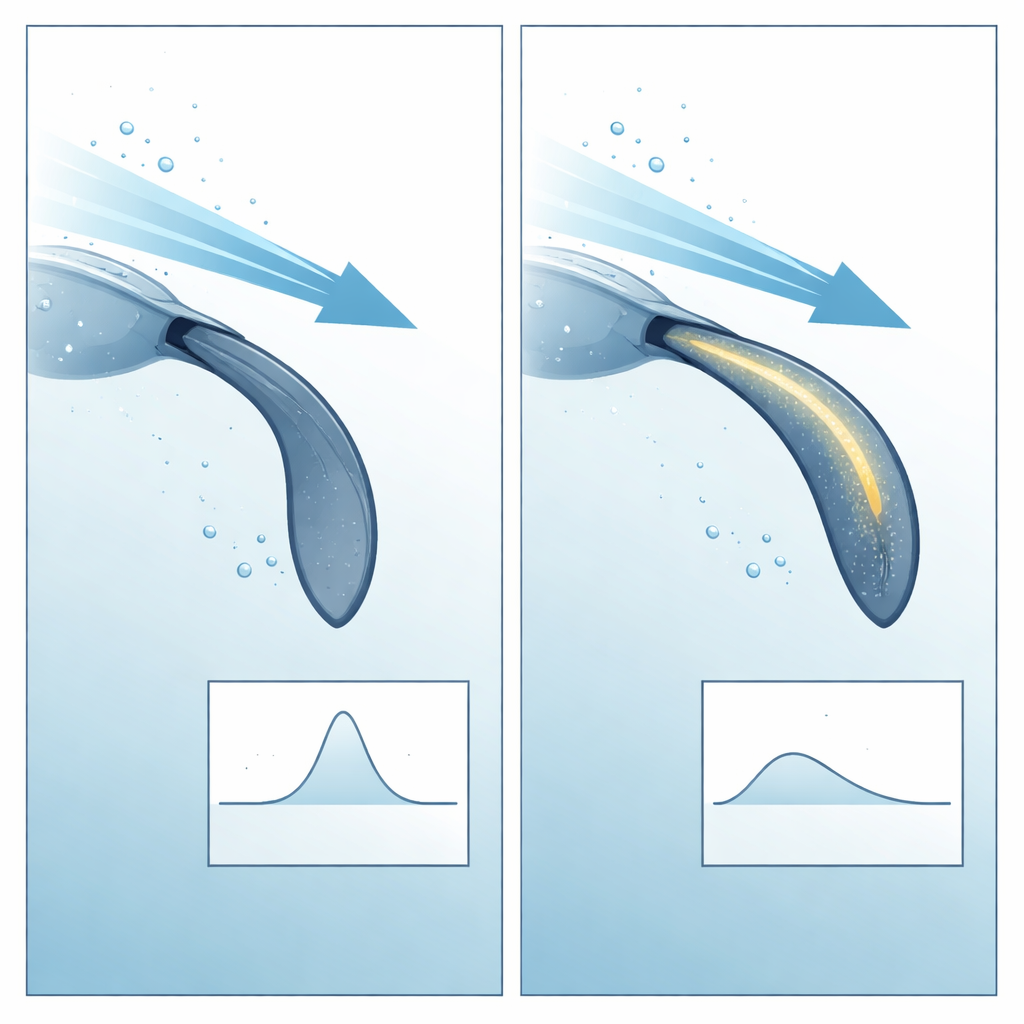
Con questa ala propriocettiva montata in una galleria d’acqua, i ricercatori hanno simulato raffiche come cambiamenti improvvisi dell’angolo dell’ala rispetto al flusso. Per prima cosa hanno dimostrato, in condizioni stazionarie, che modificando il camber si può produrre la stessa portanza a differenti angoli di flusso, o portanze diverse allo stesso angolo. Questo significa che quando una raffica cerca di sbilanciare l’ala, esiste un “percorso” nello spazio delle forme che può ristabilire la portanza desiderata. Hanno poi programmato una risposta open-loop idealizzata—sapendo esattamente quando la raffica sarebbe avvenuta—per gonfiare o sgonfiare i tubi nei momenti giusti. In questo scenario ideale, cambiare il camber ha ridotto il calo di portanza durante una perturbazione da circa il 50% a circa il 10%.
Lasciare che l’ala reagisca da sola
La prova più severa è stata lasciare che l’ala decidesse da sola quando qualcosa non andava. Qui l’e-skin rileva una “firma” caratteristica nel segnale del camber: un rapido sovraelongamento e un’oscillazione mentre il corpo morbido si flette sotto un cambiamento improvviso del flusso. Quando compare questo schema, un controllore semplice gonfia i tubi nella direzione più probabile per riportare la portanza verso il valore target, senza calcolare esplicitamente flusso o forze. Anche questa strategia minimalista funziona bene. Rispetto a un’ala rigida equivalente, l’ala morbida non attuata da sola riduce l’impulso di una raffica—essenzialmente lo spintone complessivo nel tempo—di circa un fattore tre. Quando si aggiunge il controllo attivo, l’impulso di portanza indesiderato totale si riduce fino all’87%, avvicinandosi e persino superando la capacità di gestione delle raffiche riportata per alcuni uccelli, sebbene in un mezzo diverso.
Perché questo conta per i robot del futuro
Per il lettore non specialista, il messaggio chiave è che rendere i robot subacquei più morbidi e più consapevoli di sé può renderli sia più resistenti sia più efficienti. Invece di contrastare le perturbazioni con motori potenti e sensori esterni complessi, il corpo flessibile del robot e la pelle incorporata aiutano ad assorbire e leggere il flusso, attivando modeste modifiche di forma che lo mantengono in rotta. Pur essendo questo studio focalizzato su una singola ala sperimentale in una vasca controllata, gli stessi principi potrebbero applicarsi a veicoli completi o a robot nuotatori simili a pesci. A lungo termine, tale “intelligenza incarnata” potrebbe permettere alle macchine di esplorare oceani turbolenti con la stessa grazia silenziosa che uccelli e pesci già mostrano in aria e in acqua.
Citazione: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
Parole chiave: robotica morbida, veicoli subacquei, design bioispirato, rigettazione delle perturbazioni del flusso, sensori propriocettivi