Clear Sky Science · it
Percezione tattile incorporata delle proprietà degli oggetti morbidi
Perché insegnare ai robot a percepire conta
Immaginate un robot che esplora delicatamente l’addome di un paziente, seleziona frutta matura senza ammaccarla o assembla componenti fragili usando solo il tatto. Per fare tutto questo in sicurezza, i robot devono imparare a “sentire” gli oggetti morbidi in modo ricco e simile a quello umano. Questo articolo descrive come i ricercatori hanno costruito una pelle elettronica e un nuovo tipo di modello di apprendimento affinché i robot possano meglio percepire la morbidezza, la forma e la texture superficiale di oggetti cedevoli—avvicinando le macchine a un tocco veramente abile.
Costruire un senso del tatto ad alta tecnologia
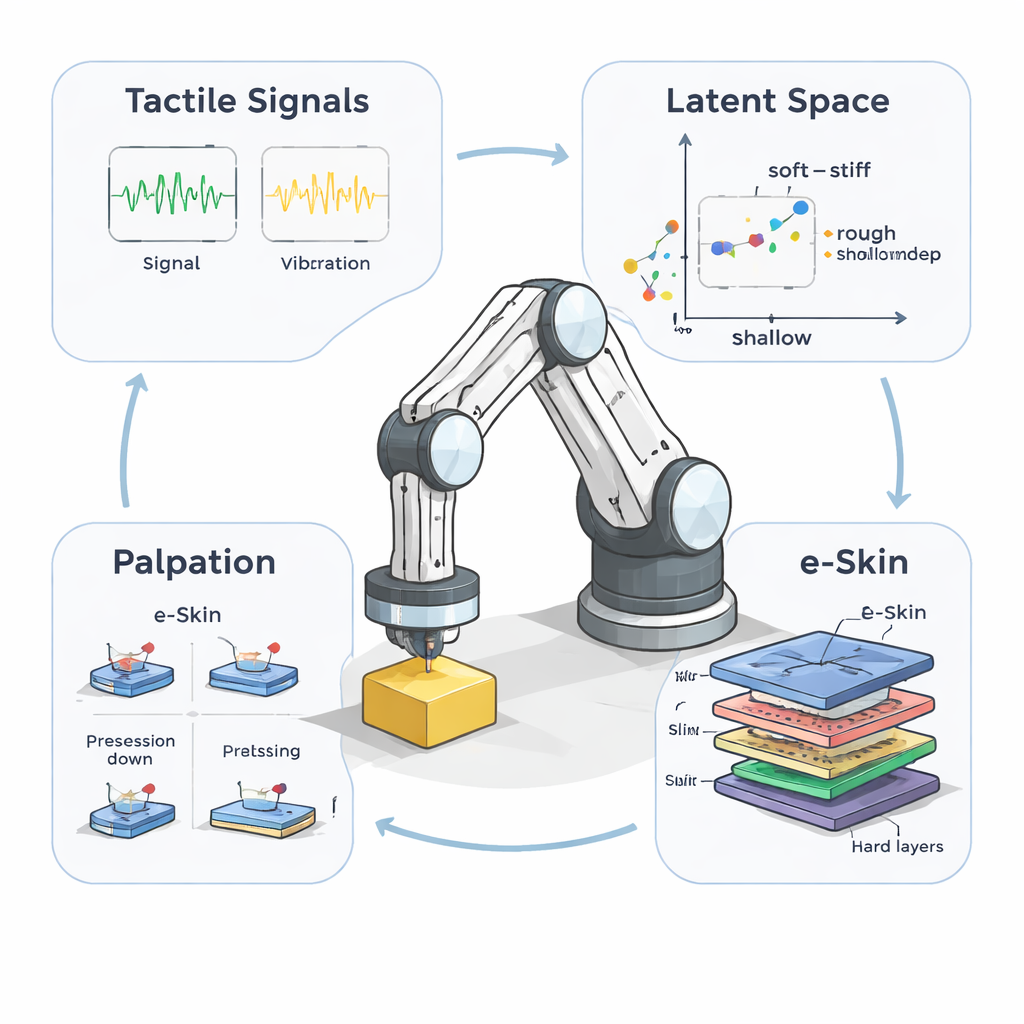
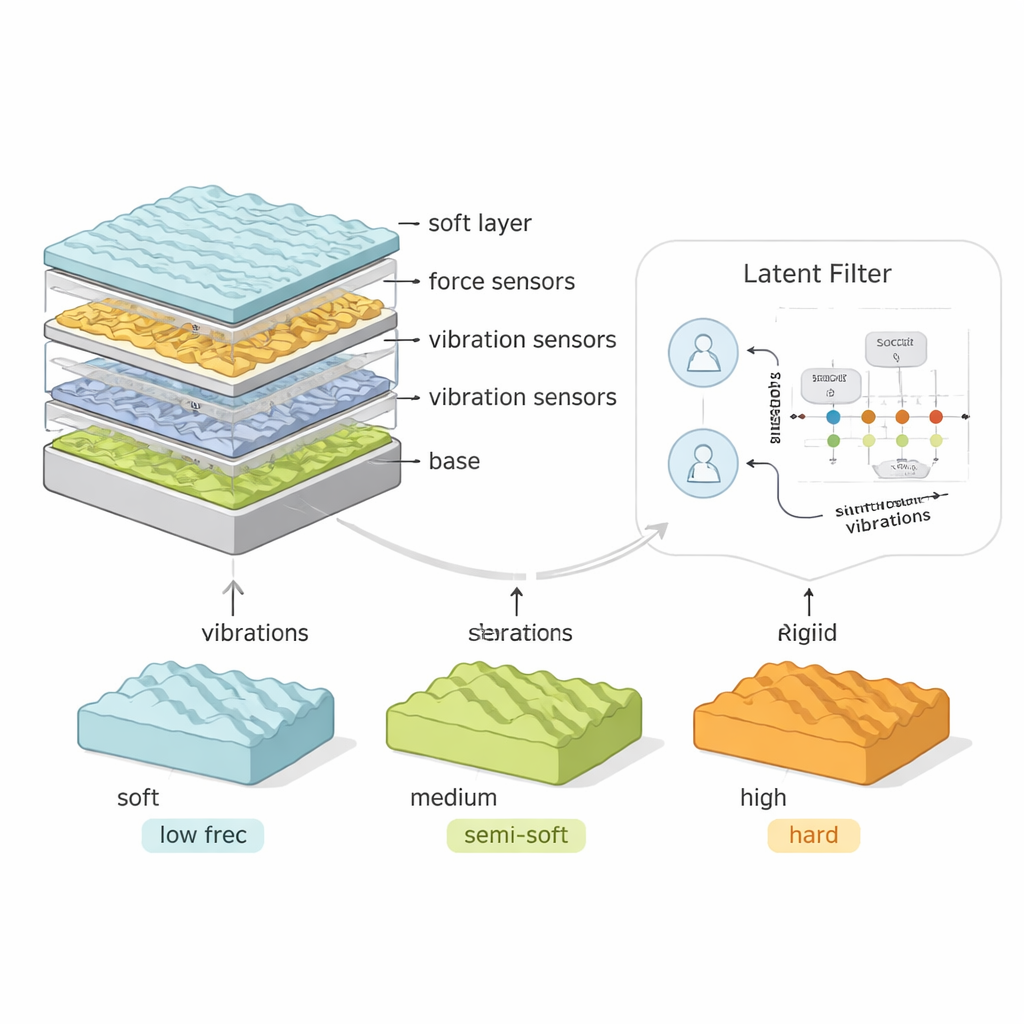
La pelle umana è morbida, stratificata e piena di diversi recettori tattili che rispondono a pressione, stiramento e vibrazione. Il team ha cercato di imitare queste capacità in un robot. Hanno creato una pelle elettronica modulare, o e‑Skin, composta da strati di silicone impilati con sensori incorporati. Due strati contengono griglie dense di sensori di forza che misurano quanto la pelle viene compressa in punti diversi, mentre un terzo strato ospita piccoli accelerometri che captano vibrazioni rapide, come la sensazione di una leggera ruvidezza quando si sfiora un tessuto. Variando i tipi di silicone, potevano rendere l’e‑Skin più morbida o più rigida, e attivando o disattivando gli strati di sensori potevano testare diverse combinazioni di “organi di senso”.
Progettare un mondo di oggetti morbidi
Per studiare il tatto in modo controllato, i ricercatori avevano bisogno di più che semplici blocchi di gomma. Hanno creato una libreria di “oggetti a onda” con proprietà accuratamente tarate. Ciascun oggetto aveva una superficie superiore ondulata i cui rilievi potevano essere bassi o alti (ampiezza) e ravvicinati o distanziati (frequenza spaziale), e ogni pezzo era colato in materiali che andavano da silicone molto morbido a plastica rigida. Alcuni campioni nascondevano anche un sottile strato rigido sotto una superficie morbida, imitando tessuti o materiali che cambiano comportandosi diversamente quando si preme più a fondo. Questo permetteva al team di conoscere la morbidezza e la texture esatte di ogni oggetto toccato dal robot, così da poter confrontare ciò che il robot “sentiva” con la verità sperimentale.
Insegnare ai robot a esplorare col tatto
Proprio come le persone pungono, premono e sfregano le dita in modi diversi per giudicare un oggetto, il robot ha usato tre movimenti di palpazione di base. Nella pressione ha mosso l’e‑Skin su e giù per sondare la morbidezza complessiva. Nella precessione ha inclinato e fatto ruotare l’e‑Skin, venendo a contatto con più regioni vicine e sondando forme più complesse. Nello scorrimento si è mosso lateralmente sulla superficie per mettere in evidenza texture fini e attrito. Per ogni oggetto il robot ha eseguito queste manovre con profondità e velocità variabili, generando migliaia di segnali tattili variabili nel tempo—forze che cambiano sulla pelle e vibrazioni che vi si propagano. Questi flussi di dati dinamici e ricchi sono molto più informativi di una singola puntura statica.
Scoprire schemi nascosti nel tatto
Per dare senso a questo diluvio di informazioni, gli autori hanno introdotto un modello di apprendimento automatico che chiamano Filtro Latente. Invece di tentare di etichettare gli oggetti direttamente, il modello impara una “mappa” interna in cui ogni punto riassume l’interazione in corso del robot con un oggetto. Questo spazio latente è strutturato in modo che alcuni componenti rispondano rapidamente a segnali tattili immediati, mentre altri integrino l’informazione lentamente nel tempo. Allenando il Filtro Latente su molte interazioni, il team ha mostrato che questa mappa interna si allinea naturalmente con tratti fisici significativi come la rugosità della superficie, l’altezza dei rilievi e la rigidità—nonostante al modello non siano mai stati forniti esplicitamente questi etichette. Un passaggio di regressione separato ha confermato che queste caratteristiche nascoste potevano prevedere con buona accuratezza le reali proprietà meccaniche di un oggetto.
Come pelle, sensori e movimento lavorano insieme
Gli esperimenti hanno rivelato che nessuno strato di sensori o strategia di movimento è ottimale per tutte le situazioni. Combinare informazioni di vibrazione e di forza tramite un approccio di “fusione tardiva”—dove ogni tipo di segnale viene elaborato separatamente prima di essere unito—ha fornito la comprensione più affidabile degli oggetti morbidi. Due strati di forza hanno aiutato il sistema a percepire taglio e stiramento, vitali per rilevare rigidità e strutture interne nascoste, mentre le vibrazioni sono state particolarmente utili per sentire texture fini durante lo scorrimento. Anche la morbidezza meccanica dell’e‑Skin stessa ha importanza: pelli più rigide erano migliori nel misurare la rigidità complessiva e la forma, mentre pelli più morbide eccellevano nel percepire variazioni sottili in materiali cedevoli o stratificati. I risultati suggeriscono che il tatto robotico dovrebbe essere co‑progettato: le proprietà della pelle, l’elettronica di sensori e il modo in cui il robot si muove devono essere sintonizzati insieme.
Cosa significa questo per i robot di tutti i giorni
Unendo una e‑Skin stratificata ispirata all’umano con un potente modello di apprendimento che riconosce il ruolo dell’azione, questo lavoro mostra come i robot possano costruire un senso del tatto più profondo. Invece di fare affidamento solo su telecamere o soglie di forza semplici, le macchine future potrebbero percepire come un oggetto cede, vibra e cambia mentre lo esplorano, quindi adattare presa o movimento al volo. Tali capacità sono fondamentali per applicazioni come la palpazione medica, la manipolazione di alimenti morbidi e la gestione di oggetti deformabili in case e fabbriche. In termini semplici, lo studio dimostra che per toccare il mondo con la nostra efficacia, i robot non devono solo avere buoni sensori, ma anche il “corpo” giusto, le abitudini di movimento adeguate e un modo intelligente per tessere tutte quelle informazioni in una comprensione coerente di ciò che stanno sentendo.
Citazione: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
Parole chiave: tatto robotico, pelle elettronica, rilevamento oggetti morbidi, percezione tattile, robotica incarnata