Clear Sky Science · it
GenHand: retargeting cinematic generalizzato della presa umana
Insegnare ai robot a tenere le cose come le teniamo noi
Dal sollevare una tazza di caffè al girare un cacciavite, le nostre mani rendono la manipolazione degli oggetti semplice e naturale. I robot, invece, spesso faticano a afferrare con affidabilità gli oggetti di uso quotidiano, specialmente quando le loro pinze non somigliano affatto a una mano umana. Questo articolo presenta GenHand, un sistema che apprende dai movimenti della mano umana in immagini ordinarie e li trasforma in prese stabili e simili a quelle umane per molti tipi diversi di mani robotiche.
Perché le mani dei robot richiedono più di semplici copie
Molti sistemi attuali di teleoperazione e apprendimento per imitazione cercano di copiare direttamente la posa della mano umana sulla mano del robot. Allineano le posizioni delle punte delle dita e gli angoli delle giunture il più fedelmente possibile. Questo funziona solo quando la mano robotica somiglia molto a una mano umana e ha un numero di dita e articolazioni simile. Non appena la pinza robotica è più semplice — per esempio due dita piatte — la posa copiata potrebbe non garantire più una presa sicura. Questi approcci ignorano in gran parte anche la forma dell’oggetto e i punti di contatto necessari, perciò le prese risultanti possono scivolare, perdere l’equilibrio o non toccare correttamente la superficie.
Osservare insieme mani e oggetti
GenHand affronta questo problema concentrandosi sull’interazione tra mano e oggetto, non solo sulla forma della mano. Partendo da una normale immagine RGB, il sistema ricostruisce un modello 3D dettagliato dell’oggetto e un modello 3D parametrico della mano umana. Usa una rete neurale per inferire la posa della mano e una rappresentazione avanzata a "distanza firmata" per recuperare la superficie dell’oggetto. Da questa coppia di modelli, GenHand determina dove le punte delle dita umane effettivamente entrano in contatto e in quali direzioni esercitano forza sull’oggetto. Poi raggruppa questi punti di contatto in un piccolo insieme di regioni significative e direzioni di forza che riassumono la struttura essenziale della presa umana, filtrando i dettagli non necessari.
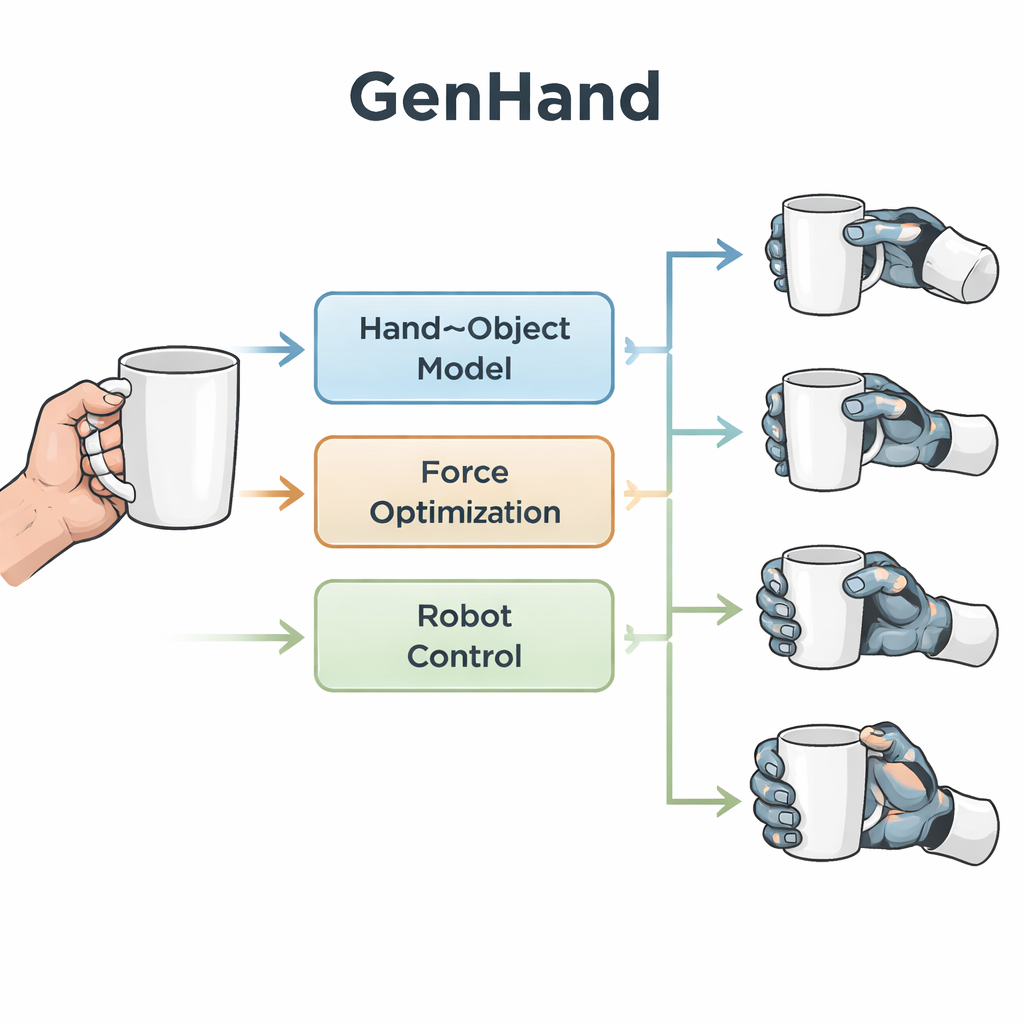
Reinventare la presa per ogni robot
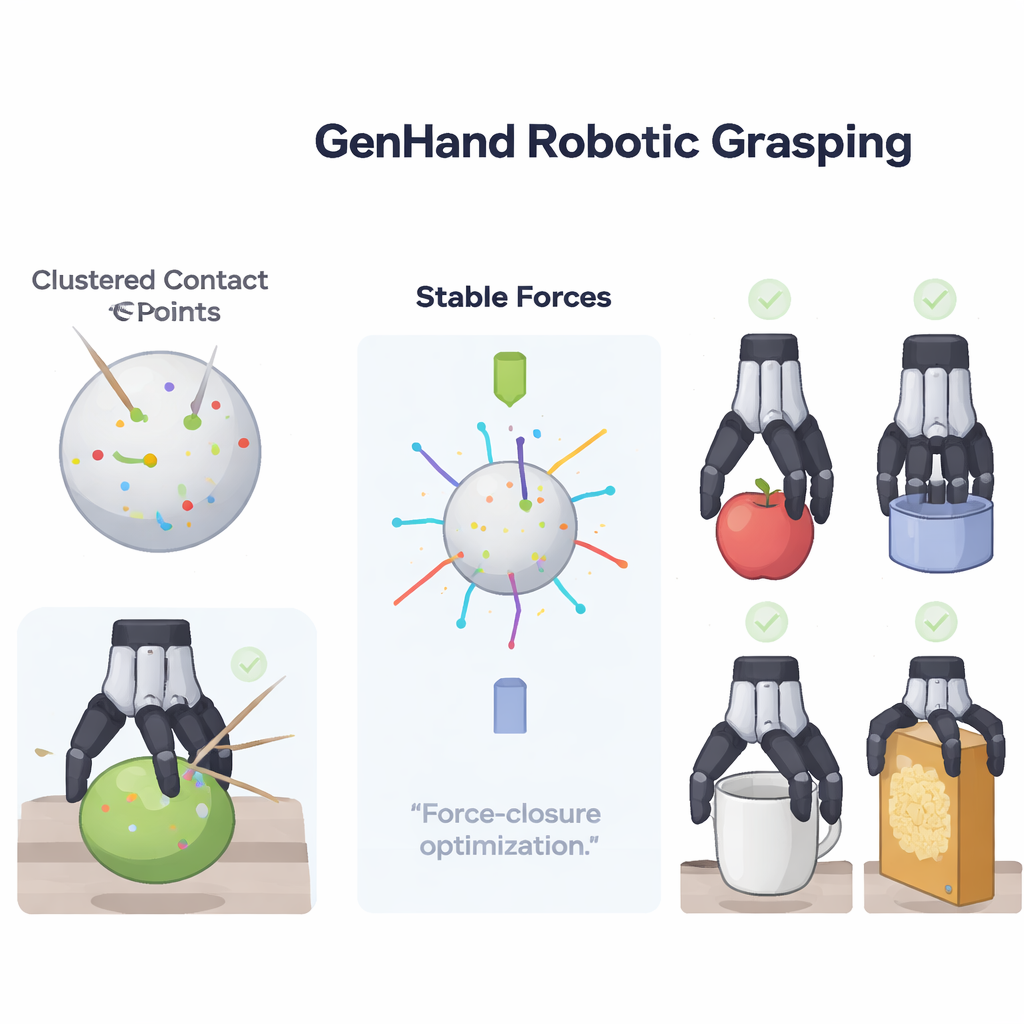
Una volta che GenHand comprende le regioni di contatto chiave e come queste sostengono l’oggetto, costruisce un nuovo insieme di "ancore di contatto" adatte alla specifica pinza robotica. Per una pinza semplice a due dita, può mantenere solo due regioni di contatto opposte, come una coppia di pollici che stringono una scatola. Per mani più abili con tre, quattro o cinque dita, può assegnare ancore aggiuntive per riprodurre meglio il ricco schema di contatto della presa umana. Un passaggio di ottimizzazione matematica cerca quindi posizioni di contatto sulla superficie dell’oggetto in grado di bilanciare forze e momenti in tutte le direzioni, una proprietà nota come chiusura della forza (force closure). Crucialmente, GenHand rimane vicino ai contatti umani originali pur insistendo che la presa risultante sia fisicamente stabile nel mondo reale.
Dai contatti stabili ai movimenti reali del robot
Con le ancore di contatto stabili definite, una seconda fase di ottimizzazione trova angoli delle giunture e movimenti del polso reali per il robot che possano realizzare quelle ancore senza violare i limiti articolari o causare collisioni con l’oggetto. Per farlo, GenHand abbina ripetutamente i potenziali siti di contatto del robot alle ancore desiderate, regola la posa e verifica se i link penetrano l’oggetto. Questo processo viene applicato a una gamma di mani robotiche — da una semplice pinza Robotiq a due dita fino a una mano Shadow altamente articolata a cinque dita — e testato in simulazione fisica. Rispetto a un baselines di punta che imita solo la geometria delle punte delle dita, GenHand produce squilibri di forza molto più bassi, contatti superficiali più accurati e tassi di successo significativamente maggiori nel sollevare e tenere 20 oggetti di uso quotidiano in diverse condizioni di attrito.
Dove questo potrebbe portare i robot di tutti i giorni
Per il lettore non specialista, la conclusione è che GenHand offre ai robot un migliore senso del "come" tenere le cose, non solo del "dove" posizionare le dita. Imparando da prese umane reali e applicando regole di base sulla stabilità fisica, può ritargettare la stessa dimostrazione umana a mani robotiche molto diverse ottenendo comunque prese solide e affidabili. Questo rende più facile controllare robot teleoperati, aiuta i sistemi di apprendimento a istruirsi con esempi più ricchi e ci avvicina a robot domestici e da lavoro capaci di manipolare in sicurezza la stessa ampia varietà di oggetti che le persone gestiscono.
Citazione: Qi, L., Popoola, O., Imran, M.A. et al. GenHand: generalised human grasp kinematic retargeting. npj Robot 4, 19 (2026). https://doi.org/10.1038/s44182-026-00076-1
Parole chiave: presa robotica, teleoperazione, dimostrazione umana, mani robotiche, manipolazione