Clear Sky Science · it
Pinza robotica miniaturizzata economica stampata in 3D con telecamera integrata per la stima delle forze e dei momenti basata sulla visione
Perché le pinze morbide in miniatura contano
I robot diventano sempre più piccoli e si occupano di compiti più delicati, dall’assemblaggio di ingranaggi minuscoli alla raccolta di bacche mature senza schiacciarle. Ma la maggior parte delle mani robotiche ancora stringe alla cieca, con poca consapevolezza della pressione esercitata. Questo articolo presenta una pinza miniaturizzata economica stampata in 3D, soprannominata “Seezer”, che può sia afferrare oggetti fragili sia “sentire” le forze usando una minuscola telecamera all’interno delle punte delle dita anziché costosi sensori di forza.
Una mano gentile che vede
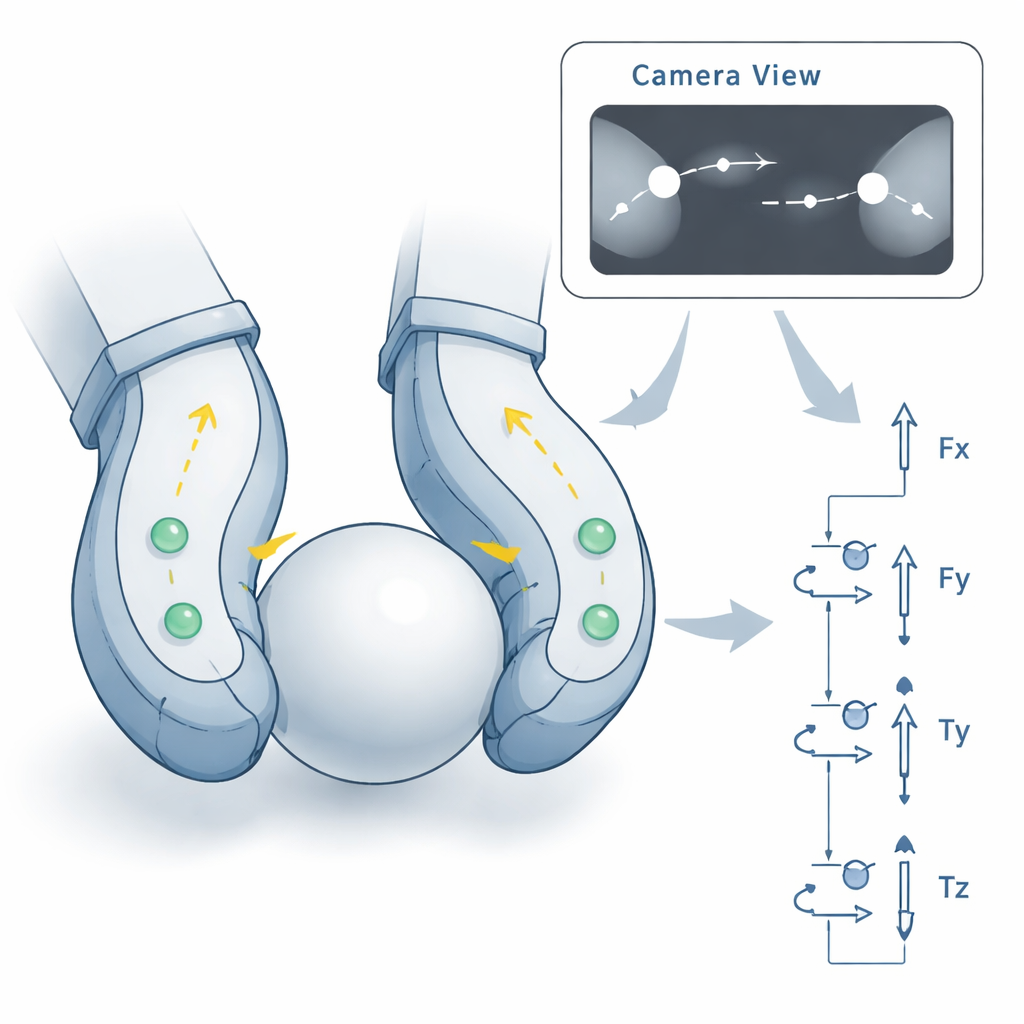
Il Seezer è una pinza robotica morbida e deformabile le cui dita si flettono invece di articolarsi come pinze metalliche. L’idea chiave è costruire quasi tutto in un unico pezzo su una stampante 3D di livello consumer: un componente monolitico della dita che include giunti flessibili, forme delle punte personalizzate per il compito e piccoli marcatori integrati. Questo modulo di dito usa e getta si infila su un’unità motore compatta che ospita una microtelecamera e luci. Quando il motore aziona un ingranaggio a vite senza fine, i giunti flessibili si piegano e le dita si chiudono intorno all’oggetto, mentre la telecamera osserva le punte e lo spazio davanti alla pinza.

Leggere la forza dalle pieghe delle dita
Invece di inserire fili, estensimetri o pad di pressione nelle dita, il Seezer dipinge l’interno con segnali visivi ricchi di informazioni. Ogni punta porta piccoli marcatori circolari “fiduciali” le cui posizioni nell’immagine della telecamera cambiano quando il dito si deforma. Il software rileva e traccia questi marker in ogni fotogramma. Poi, sulla base di una breve sequenza di calibrazione, semplici modelli matematici apprendono come gli spostamenti dei marker si riferiscono alle forze di spinta e trazione effettive su ciascuna punta. Combinando le tre forze sulle punte con la fisica di base, il sistema stima le forze e i momenti complessivi sulla pinza in tutte e sei le direzioni, oltre alla forza di compressione tra le dita.
Quanto bene percepisce le forze
Per verificare l’accuratezza di questo rilevamento basato sulla telecamera, gli autori hanno confrontato le stime del Seezer con le letture di un sensore di forza/momento commerciale ad alta precisione in un setup di laboratorio controllato. Con una versione del design della punta (punte più rigide), la pinza misurava forze di presa fino a circa 1,1 newton con errori tipici tra l’8% e il 17%, e forze e momenti a sei assi con errori per lo più tra l’8% e il 24%. Una versione con punta più morbida sacrificava la forza massima in favore di maggiore sensibilità, producendo forze minori ma percentuali di errore ancora comparabili. Importante, i modelli richiedevano solo da 31 a 141 punti di calibrazione—molto meno delle migliaia di immagini spesso necessarie ai metodi di deep learning che lavorano su fotogrammi interi.
Dagli ingranaggi minuscoli alle bacche delicate
Due compiti dimostrativi evidenziano cosa questa pinza potrebbe fare in contesti reali. In uno, il Seezer afferrava ripetutamente piccoli ingranaggi stampati in 3D da assi, li spostava e li riposizionava, usando la telecamera interna sia per allineare la sede dell’ingranaggio con l’asse sia per monitorare il movimento delle dita. Questo imita lavori di assemblaggio industriale di precisione in spazi ristretti. In un altro, la pinza raccoglieva ribes rossi dai loro gambi. Qui, il sistema monitorava in tempo reale la forza di presa stimata e smetteva di chiudere una volta raggiunta una soglia prestabilita, in modo che la bacca venisse staccata senza essere schiacciata. Entrambi gli esempi giravano su elettronica economica e hanno mostrato che un unico design può gestire oggetti rigidi e morbidi di pochi millimetri di dimensione.
Sfide e usi futuri
Il Seezer è ancora una prova di concetto e ha dei limiti. Il tracciamento dei marker funziona meglio in scene stabili, ben illuminate e con sfondi poco affollati; variazioni di illuminazione, superfici lucide e movimenti complessi possono causare errori di tracciamento. La modesta frequenza dei fotogrammi della telecamera limita anche la velocità di reazione del sistema per un controllo della forza rigoroso o per un feedback aptico ricco. I materiali delle dita possono subire affaticamento o cambiare comportamento dopo un uso prolungato, e il team non ha ancora testato sistematicamente le prestazioni su lunghi periodi. Gli autori sostengono che algoritmi di tracciamento più robusti o la combinazione dell’hardware con moderni stimatori di forza basati su deep learning potrebbero aumentare accuratezza e affidabilità, mentre i progressi nella stampa 3D dovrebbero permettere ulteriori miniaturizzazioni e punte usa e getta sterilizzabili per applicazioni chirurgiche o di laboratorio.
Cosa significa per la robotica di tutti i giorni
In termini semplici, questo lavoro mostra che una mano robotica piccola ed economica può allo stesso tempo vedere e sentire osservando come si piegano le proprie dita morbide. Con pochissimi dati di calibrazione e componenti disponibili in commercio, il Seezer stima quanto stringe e in quale direzione agiscono forze e momenti, con precisione sufficiente per compiti di manipolazione delicata. Se ne sarà migliorata la robustezza, lo stesso approccio potrebbe aiutare i robot futuri a gestire oggetti piccoli e fragili—come dispositivi medici, componenti elettronici, frutta o persino tessuto in chirurgia mini‑invasiva—senza sensori ingombranti o hardware complessi, portando il tatto sensibile dove spazio e costi sono limitati.
Citazione: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
Parole chiave: pinza robotica morbida, rilevamento della forza basato sulla visione, robotica stampata in 3D, manipolazione in miniatura, feedback aptico