Clear Sky Science · it
Far progredire la robotica morbida: progressi recenti negli attuatori dielettrici a elastomero e a fluido
Robot morbidi che si muovono più come muscoli
Immaginate un robot che possa abbracciare in sicurezza un bambino, farsi spazio fra le macerie in un edificio crollato o massaggiare con delicatezza un cuore in difficoltà. Per svolgere questi compiti le macchine devono flettersi ed estendersi come i tessuti viventi, non cigolare come il metallo. Questa recensione spiega come una nuova classe di «muscoli» elettrici morbidi — realizzati con solidi e liquidi gommosi — stia avvicinando quella visione alla realtà e quali sfide restino da superare prima che escano dal laboratorio e entrino nella vita di tutti i giorni.
Dai motori rigidi ai muscoli elettrici morbidi
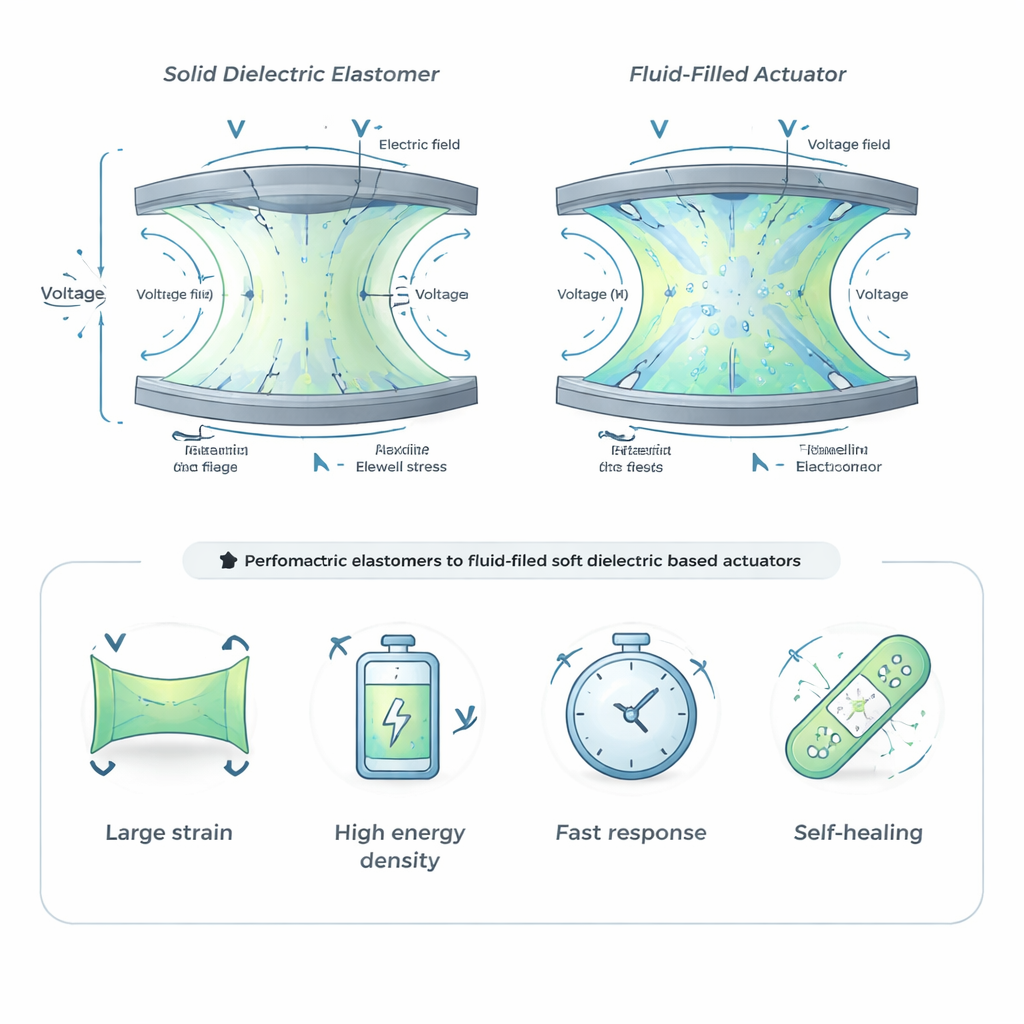
La maggior parte dei robot industriali si basa su motori e ingranaggi pesanti e rigidi. Sono potenti e precisi, ma anche costosi, fragili e potenzialmente pericolosi con le persone intorno. I robot morbidi, costruiti con materiali elastici simili alle teglie in silicone o agli elastici, scambiano la forza bruta con delicatezza, adattabilità e resilienza. Il focus di questo articolo sono gli attuatori morbidi azionati elettricamente: gli attuatori dielettrici a elastomero (DEA), che impiegano uno strato di gomma solida, e gli attuatori dielettrici a fluido (DFA), che usano un liquido isolante elettricamente sigillato in una tasca flessibile. In entrambi i casi, applicando una tensione tra due elettrodi deformabili si comprime il materiale tramite forze elettrostatiche e si converte direttamente energia elettrica in movimento, ottenendo grandi deformazioni, alta densità energetica e risposta rapida.
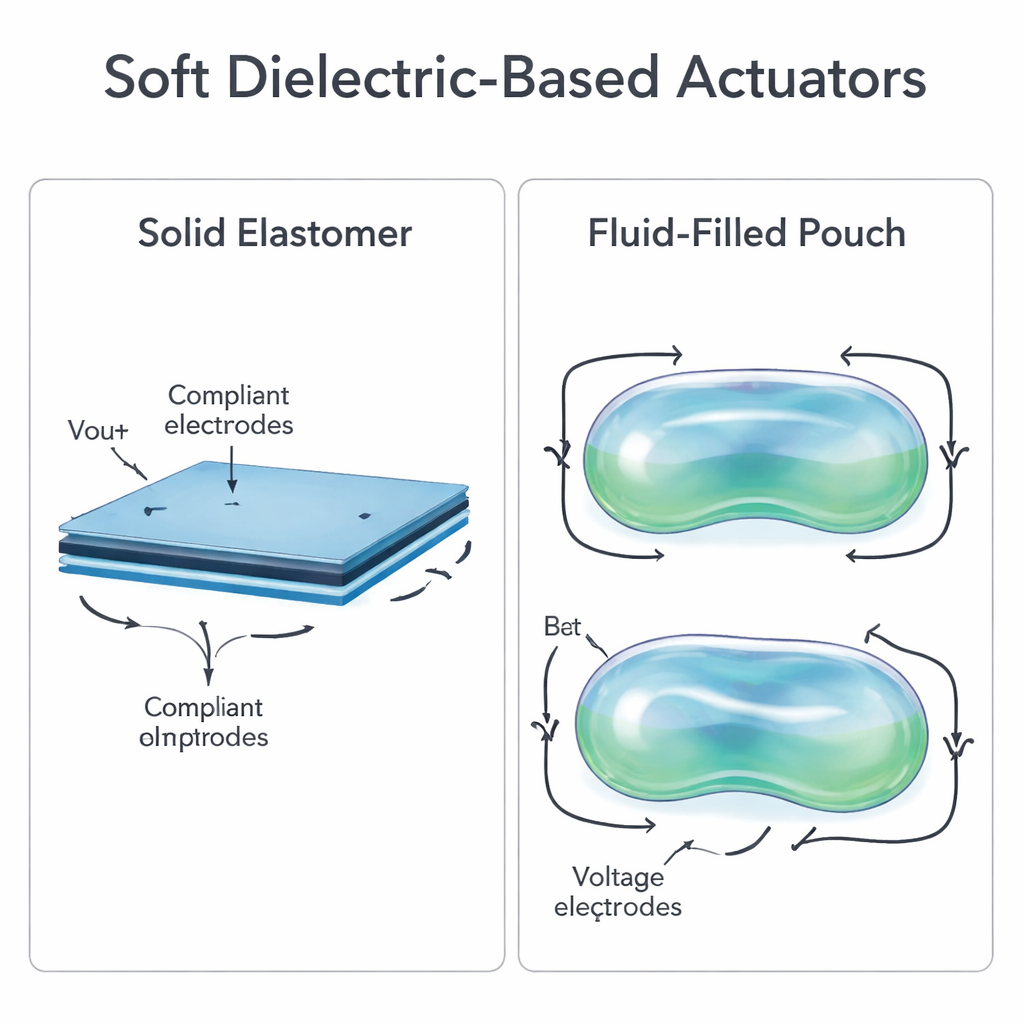
Come i materiali fanno funzionare i muscoli
Per comportarsi come muscoli utili, questi dispositivi richiedono materiali con caratteristiche molto particolari. Per i DEA, il foglio centrale di gomma deve essere estremamente morbido per estendersi facilmente, ma anche sopportare campi elettrici elevati senza lacerarsi o cortocircuitare. I ricercatori bilanciano queste esigenze con due strategie principali. Una è progettare nuovi polimeri — dagli acrilici, siliconi e poliuretani fino a copolimeri più esotici — che incorporino numerosi gruppi chimici polari (che amplificano la risposta elettrica) in reti flessibili a bassa rigidezza. L’altra è creare compositi miscelando piccole particelle o liquidi che aumentano la capacità del materiale di immagazzinare energia elettrica. Un ragionamento analogo guida il design dei DFA: gli ingegneri scelgono oli e altri liquidi dielettrici con viscosità, stabilità e compatibilità adeguate con gusci sottili di plastica o silicone, in modo che la tensione possa spostare rapidamente il fluido per creare rigonfiamenti, corsa e vibrazioni senza perdite o degradazione chimica.
Costruire e pilotare attuatori morbidi su scala
Trasformare questi materiali intelligenti in dispositivi affidabili è una sfida ingegneristica a sé stante. Le tecniche tradizionali spesso richiedono passaggi manuali laboriosi: tendere film sottili su telai, dipingere o stampare elettrodi morbidi, impilare strati e — nel caso dei DFA — iniettare il liquido e sigillare la tasca. L’articolo esamina nuove vie di produzione come stampa inkjet e serigrafica, estrusione di muscoli fibre‑simili e stampa 3D multimateriale che può depositare elettrodi e dielettrici in un unico passaggio. Spiega anche come forme diverse generino movimenti diversi: patch piatte che espandono l’area, cupole che si sollevano, cilindri arrotolati che si contraggono in lunghezza e strutture che si piegano o vibrano. Poiché questi materiali possono invecchiare, perdere liquidi o guastarsi per rottura dielettrica, gli autori riepilogano studi sulla durata e i guasti comuni, sottolineando inoltre lo sviluppo di design autoriparanti in grado di riprendersi dopo scintille o perforazioni.
Controllo più intelligente e usi emergenti
Come i muscoli naturali, gli attuatori morbidi devono essere controllati. Schemi semplici a loop aperto forniscono uno schema di tensione, ma questi possono deviare quando il materiale si riscalda o si deforma nel tempo. Approcci più avanzati integrano sensori — o sfruttano i segnali elettrici stessi dell’attuatore — per misurare in tempo reale deformazione, forza o vibrazione e regolare il segnale di pilotaggio di conseguenza. I ricercatori stanno sperimentando controller basati su machine learning e reinforcement learning in grado di affrontare il comportamento non lineare e dipendente dalla storia dei materiali morbidi. Sul fronte applicativo, l’articolo presenta un ampio panorama: muscoli artificiali che sollevano molte volte il proprio peso, robot che nuotano o volano imitando pesci e insetti, fasce indossabili aptiche e pad per le punte delle dita che forniscono feedback tattili realistici, lenti zoom e pelle ottica ispirate a calamari e occhi umani, superfici che cambiano forma e dispositivi medici concettuali che un giorno potrebbero aiutare cuori in difficoltà o volti paralizzati.
Cosa ancora separa le dimostrazioni di laboratorio dai robot del mondo reale
Nonostante le promesse, questi muscoli elettrici affrontano ancora ostacoli prima di poter alimentare in sicurezza assistenti domestici, impianti medici o dispositivi indossabili di massa. Molti richiedono tensioni di pilotaggio dell’ordine del chilovolt, il che complica sicurezza ed elettronica. Materiali che si comportano splendidamente in test brevi possono irrigidirsi, seccarsi o guastarsi dopo milioni di cicli. La produzione spesso è troppo lenta e incoerente per la produzione su larga scala. E rimane difficile riciclare o biodegradare la maggior parte dei polimeri attuali. Gli autori sostengono che il progresso dipenderà da una co‑progettazione a più scale: nuovi materiali morbidi che combinino bassa rigidezza, elevata risposta elettrica, robustezza e anche autoriparazione; processi di produzione e collaudo automatizzati e guidati dai dati; e sistemi di controllo che sfruttino sensori integrati e IA leggera. Insieme, questi avanzamenti potrebbero fornire ai robot del futuro muscoli non solo forti e veloci, ma anche sicuri, adattivi e sostenibili.
Citazione: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
Parole chiave: robotica morbida, attuatori dielettrici a elastomero, attuatori dielettrici a fluido, muscoli artificiali, interfacce aptiche