Clear Sky Science · it
Controllo predittivo basato su giochi per assistenza interattiva personalizzata e mirata
Robot che sembrano buoni partner di allenamento
Immaginate un compagno di allenamento o un fisioterapista che sa sempre quando aiutarvi a sollevare, quando lasciarvi lottare un po’ e quanto avete intenzione di muovervi dopo. Questo articolo mostra come dare ai robot di contatto — come gli esoscheletri usati in riabilitazione o in fabbrica — una simile intuizione. Stimando matematicamente come una persona intende muoversi nel prossimo secondo o due, il robot può condividere lo sforzo in modo fluido, ridurre l’affaticamento e guidare sottilmente i movimenti e l’apprendimento delle persone.
Perché è difficile condividere lo sforzo con i robot
Quando un robot è collegato fisicamente a una persona — aiutandola a muovere un arto o a portare un oggetto pesante — entrambi spingono e reagiscono continuamente. I controller tradizionali del robot per lo più ignorano ciò che l’umano sta pianificando; inseguono obiettivi di prestazione come precisione o risparmio energetico. Questo può rendere il robot troppo rigido e autoritario, oppure troppo passivo e inutilmente poco d’aiuto. I partner umani reali fanno meglio: percepiscono come si muove l’altro, si adattano alle sue capacità e incoraggiano comportamenti differenti, dalla rilassatezza allo sforzo intenso. Gli autori sostengono che per avvicinare i robot a questo tipo di interazione, il robot deve modellare esplicitamente come l’umano pianifica i movimenti e quanto sforzo è disposto a investire.
Una visione di teoria dei giochi dell’interazione umano–robot
I ricercatori si basano sulla teoria dei giochi — la matematica dell’interazione strategica — per trattare l’umano e il robot come due “giocatori” che condividono lo stesso compito. Ognuno ha i propri obiettivi: l’umano vuole seguire il movimento desiderato spendendo il meno possibile di sforzo, e il robot vuole aiutare a seguire il movimento riducendo al contempo lo sforzo della persona. Crucialmente, si assume che entrambi guardino solo a breve termine, su una finestra di pianificazione finita di circa uno o due secondi, rispecchiando il modo naturale in cui le persone pianificano i movimenti. All’interno di questa finestra, il team ricava una formula compatta per un equilibrio di Nash: un pattern bilanciato di forze in cui né l’umano né il robot possono migliorare il proprio risultato senza che l’altro cambi la propria strategia. Questo equilibrio definisce quanto ciascuno dovrebbe spingere in ogni istante.
Insegnare al robot a leggere l’intenzione umana
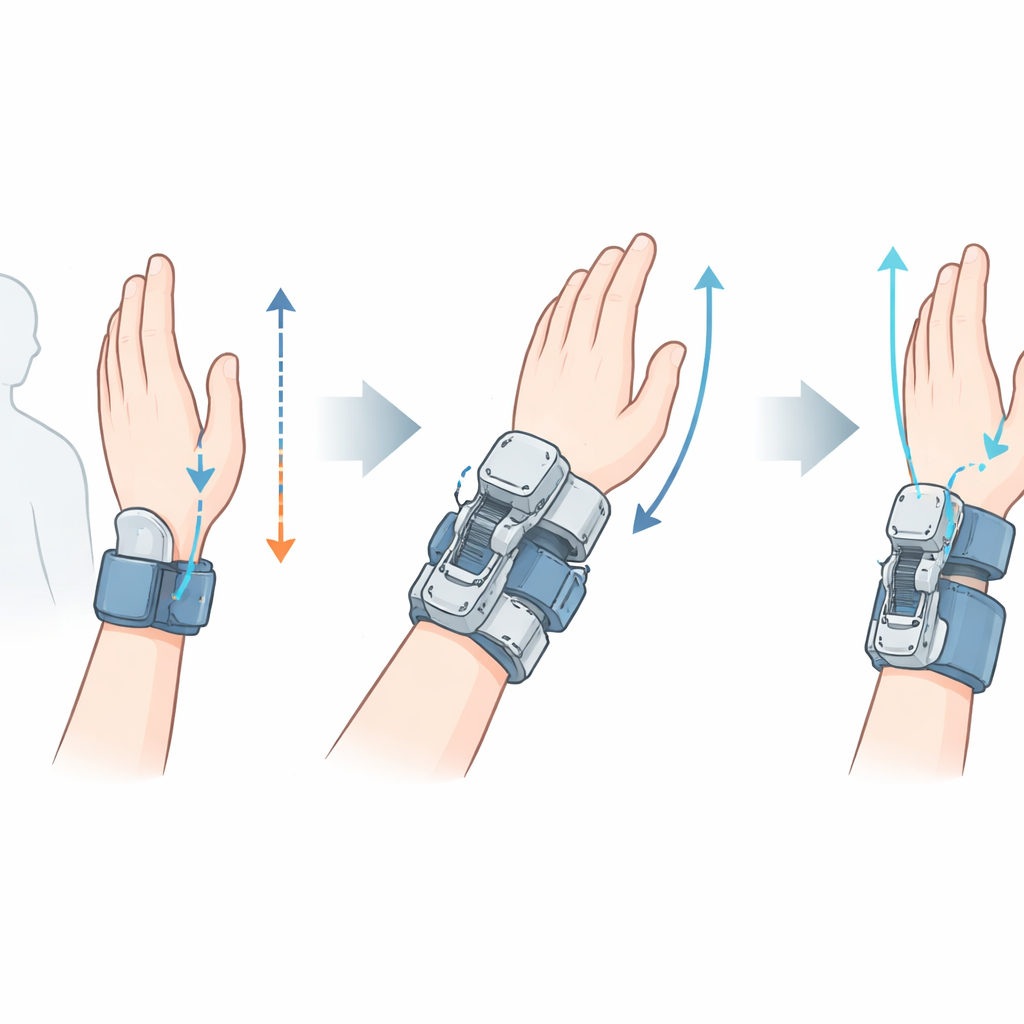
Per giocare a questo “gioco del movimento”, il robot deve prima inferire quanto l’umano dia peso alla precisione rispetto allo sforzo — una preferenza nascosta che varia da persona a persona e anche nel tempo. Gli autori risolvono questo con un approccio di gioco inverso. Mentre la persona si muove, i sensori misurano l’angolo delle articolazioni e la coppia che produce. Il controllore quindi ricerca ripetutamente il set di preferenze umane che meglio spiegherebbe la storia recente di movimenti e forze. Con quelle preferenze stimate, predice come l’umano è probabile che agisca nel prossimo orizzonte breve e calcola la forza ottimale di assistenza del robot. Tutto ciò funziona in tempo reale su un esoscheletro da polso che aiuta i soggetti a tracciare un bersaglio in movimento con la mano.
Umani e robot imparano a coordinarsi
Il team ha testato il loro controllore con trenta adulti sani in tre esperimenti. Nel primo, le persone dovevano alternare tra seguire attivamente il bersaglio e restare passive. Il controllore ha rapidamente adattato la sua stima interna di quanto la persona tenesse alla precisione, aumentando nelle fasi attive e diminuendo vicino allo zero quando si rilassavano. Nel secondo esperimento, i partecipanti alternavano prove con e senza assistenza robotica. Con il nuovo controllore, il robot ha ridotto lo sforzo articolare umano e l’attività muscolare, migliorando al contempo la precisione di tracciamento. Con prove ripetute, il pattern di interazione di ciascuna persona si è stabilizzato in un “equilibrio” individuale e la correlazione tra forze umane e robotiche è aumentata — prova di una comprensione reciproca in crescita. Nel terzo esperimento, i ricercatori hanno introdotto una singola manopola di assistenza, un meta-parametro che modifica quanto intensamente il robot cerca di minimizzare lo sforzo della persona. Girando questa manopola si è variata in modo continuo la quantità di sforzo che gli umani sceglievano di contribuire, senza peggiorare la prestazione del compito.
Guidare il comportamento con una sola manopola
Il meta-parametro di assistenza permette ai progettisti di coprire uno spettro di stili di interazione con un unico controllo: da quasi nessun aiuto, passando per una condivisione paritaria dello sforzo, fino a un supporto quasi completo in cui il robot guida e l’umano può rilassarsi. A impostazioni intermedie, gli umani tendevano a coordinarsi meglio con il robot, ciascuno portando circa metà del carico. Il pattern delle preferenze umane inferite è rimasto coerente per ogni persona attraverso diversi livelli di assistenza — tranne quando il robot faceva quasi tutto, momento in cui i comportamenti diventavano più uniformi perché le persone smettevano sostanzialmente di impegnarsi. Questo dimostra che il robot può sia scoprire stili di controllo individuali sia indirizzarli delicatamente, per esempio chiedendo agli utenti di fare di più in una fase di allenamento e meno in un’altra.
Cosa significa questo per la riabilitazione e il lavoro
Per un non esperto, il messaggio chiave è che questo controllore rende i robot più simili a partner intelligenti che a macchine rigide. Predicendo come intendiamo muoverci e regolando quanto aiutano, i robot possono ridurre il nostro sforzo quando necessario, incoraggiarci a impegnarci di più quando è utile e mantenere i movimenti precisi e stabili. Lo stesso quadro matematico può essere adattato per la riabilitazione — spostando gradualmente lo sforzo dal robot al paziente — o per la produzione collaborativa, dove persone e robot condividono carichi in modo sicuro ed efficiente. In sostanza, lo studio mostra che le persone si adattano naturalmente a un robot che “gioca lo stesso gioco”, aprendo la strada a forme di assistenza interattiva più personalizzate e mirate.
Citazione: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
Parole chiave: interazione uomo-robot, assistenza con esoscheletro, controllo basato sulla teoria dei giochi, riabilitazione motoria, controllo condiviso