Clear Sky Science · it
Tracciamento e controllo di dispositivi medici in miniatura guidati da raggi X sintetici
Strumenti più piccoli, interventi più sicuri
I chirurghi stanno iniziando a impiegare strumenti medici minuscoli e senza fili che possono muoversi all’interno dei vasi sanguigni e di altri passaggi stretti per somministrare farmaci, aprire arterie ostruite o misurare segnali vitali dalle profondità del corpo. Questi dispositivi in miniatura promettono procedure meno invasive e recuperi più rapidi—ma solo se i medici possono vederli e guidarli in sicurezza in tempo reale. Questo articolo presenta MicroSyn-X, un nuovo metodo per addestrare i computer a tracciare questi minuscoli dispositivi nelle immagini a raggi X, aprendo la strada a interventi più precisi e meno traumatici.
Il problema degli aiutanti invisibili
L’asset portante dell’imaging chirurgico odierno è la fluoroscopia a raggi X, che mostra sullo schermo le ombre in movimento di ossa, vasi e strumenti. I dispositivi in miniatura, però, sono così piccoli e deboli che spesso si confondono con lo sfondo rumoroso. Possono essere nascosti da ossa, strumenti metallici o mezzi di contrasto, e robot morbidi o fluidi cambiano continuamente forma mentre si muovono. Gli operatori umani devono osservare attentamente lo schermo e regolare magneti o cateteri a mano, un processo lento e faticoso che aumenta il rischio di errori. Addestrare la visione artificiale—software che sa “vedere” da sé—potrebbe aiutare, ma di solito richiede enormi raccolte di immagini accuratamente annotate. Per questi nuovi dispositivi, tali dataset sono quasi inesistenti perché la loro raccolta è costosa, richiede tempo e è limitata dalla privacy dei pazienti.
Insegnare ai computer con raggi X finti, ma fedeli
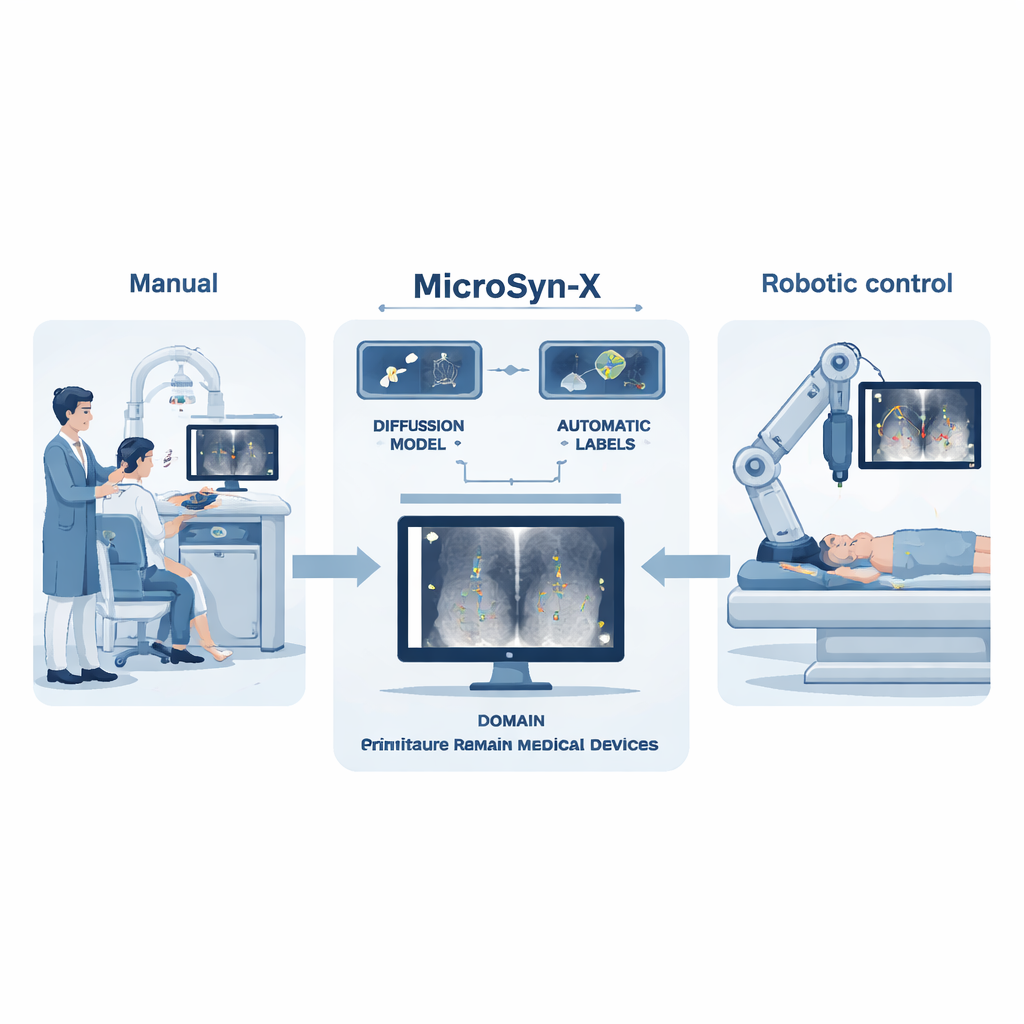
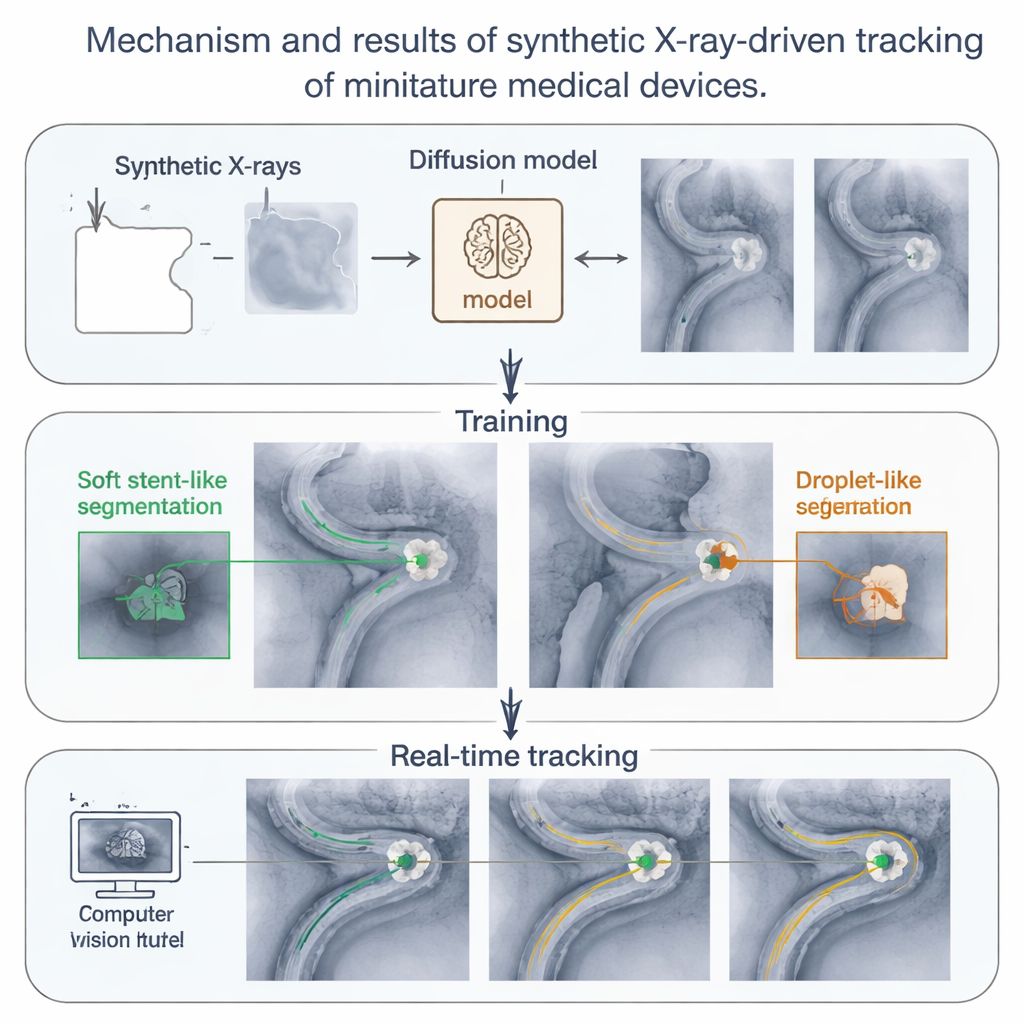
MicroSyn-X affronta questo collo di bottiglia dei dati creando le proprie immagini a raggi X altamente realistiche, complete di etichette integrate che indicano esattamente dove si trova ciascun dispositivo. Per prima cosa, il sistema usa un generatore d’immagini moderno chiamato modello di diffusione per produrre sfondi a raggi X realistici di organi, ossa e strumenti chirurgici, guidati da semplici prompt e maschere approssimative che delineano tessuti, metallo e canali pieni di liquido. Poi, immagini dei dispositivi in miniatura—o fotografate una volta su sfondo neutro o descritte matematicamente per gocce liquide—vengono digitalmente integrate in queste scene in modo che sembrino effettivamente dentro il corpo. Poiché il computer sa esattamente dove è stato posizionato ogni dispositivo, genera automaticamente contorni e riquadri precisi, eliminando l’annotazione manuale laboriosa.
Prepararsi al mondo reale con caos controllato
Un’innovazione chiave di MicroSyn-X è la “randomizzazione del dominio”, un’iniezione deliberata di variazione nelle immagini sintetiche. Il sistema cambia automaticamente le forme degli organi, le posizioni dei dispositivi, la luminosità, il livello di rumore e persino quanto i dispositivi sono nascosti da ossa o strumenti. Crea anche molte forme diverse per i robot liquidi, che possono allungarsi, dividersi in sciami e riunirsi. Confrontando l’algoritmo di apprendimento con migliaia di situazioni leggermente diverse—molte delle quali sono rare o difficili da catturare in pazienti reali—gli autori addestrano modelli che si concentrano sui segnali visivi essenziali dei dispositivi piuttosto che su pattern superficiali. I test mostrano che i modelli addestrati esclusivamente su queste immagini sintetiche possono eguagliare o superare quelli addestrati su raggi X reali, specialmente nei casi difficili con basso contrasto, alto rumore o forte occlusione.
Dallo schermo del computer al robot in sala operatoria
I ricercatori vanno oltre le dimostrazioni software e collegano MicroSyn-X direttamente a un sistema robotico. Un braccio robotico tiene un potente magnete vicino ai tessuti mentre un fluoroscopio a C-arm acquisisce immagini a raggi X. Il modello di visione addestrato con MicroSyn-X individua robot morbidi a forma di stent e gocce liquide in ogni frame, e un algoritmo di tracciamento unisce queste rilevazioni in traiettorie fluide, anche quando i dispositivi scompaiono brevemente dietro le ossa. Usando questo feedback, il robot guida i dispositivi attraverso vasi artificiali tortuosi, organi animali reali fuori dal corpo e arterie vive in conigli e ratti. Il sistema dirige con successo più dispositivi contemporaneamente, li segue attraverso vasi ramificati e monitora sciami di gocce liquide che si dividono e si ricompongono sotto controllo magnetico—tutto in tempo reale e in condizioni di imaging impegnative.
Verso cure più intelligenti e meno invasive
In termini semplici, questo lavoro dimostra che i computer possono imparare a tracciare strumenti chirurgici minuscoli in sicurezza all’interno del corpo esercitandosi su vaste librerie di raggi X “finti” accuratamente costruiti invece che su quelli reali scarsi. MicroSyn-X trasforma l’imaging sintetico in un motore pratico per la robotica: crea dati di addestramento realistici, insegna modelli di visione e alimenta il loro output in un sistema di navigazione magnetica che ha già funzionato su animali viventi. Man mano che questi metodi maturano e vengono testati in casi più complessi, potrebbero aiutare i chirurghi a eseguire procedure delicate con maggiore precisione e meno affaticamento, avvicinandoci a un futuro in cui flotte di robot in miniatura migliorano silenziosamente le terapie dall’interno.
Citazione: Wang, C., Kang, W., Sun, M. et al. Synthetic X‑ray‑driven tracking and control of miniature medical devices. Nat Mach Intell 8, 276–291 (2026). https://doi.org/10.1038/s42256-026-01190-3
Parole chiave: dispositivi medici in miniatura, imaging a raggi X, dati sintetici, robotica medica, visione artificiale