Clear Sky Science · it
Sistema di filtraggio di Kalman multi-stadio per fusione di sensori integrato con memtransistor MoS2 con 1024 livelli di conduttanza
Sensori più intelligenti per auto a guida autonoma più sicure
Le auto a guida autonoma moderne si basano su uno sciame di sensori per comprendere la strada, ma fondere tutte quelle informazioni in modo rapido ed efficiente è sorprendentemente difficile. Questo studio mostra come un nuovo tipo di dispositivo elettronico miniaturizzato, chiamato memtransistor, possa accelerare e semplificare quel processo di integrazione, noto come fusione dei sensori. Spostando calcoli chiave dai pesanti chip digitali all’hardware analogico snello, i ricercatori riducono drasticamente sia il consumo energetico sia i ritardi, indicando la strada verso sistemi autonomi più sicuri e reattivi in grado di gestire maltempo, visuali occluse e strade affollate.
Perché molti occhi sono meglio di uno
Sui percorsi di prova e sulle autostrade odierne, i veicoli autonomi osservano il mondo con un mix di telecamere, telerilevamento laser (LiDAR), radar a onde millimetriche e sensori di movimento che tracciano lo spostamento del veicolo. Ognuno di questi ha punti di forza e limiti: il LiDAR può essere bloccato da camion o edifici, il radar fatica sui dettagli fini e i sensori di movimento, se usati da soli, tendono a deviare lentamente dalla realtà. Per ottenere un quadro affidabile del traffico circostante, il veicolo deve unire queste visioni imperfette in una stima coerente di dove si trovano gli oggetti e di come si muovono. Uno strumento matematico chiamato filtro di Kalman è diventato lo standard per farlo in tempo reale, ma nella sua forma convenzionale gira su processori digitali che consumano energia e introducono ritardi mentre trasferiscono ripetutamente dati tra sensori analogici e logica digitale.

Un nuovo tipo di mattoncino elettronico
Il team affronta questo problema usando un dispositivo costruito da un singolo strato atomico del semiconduttore disolfuro di molibdeno (MoS2). Il loro memtransistor combina il ruolo di elemento di memoria e di transistor in un’unica struttura a tre terminali, la cui conduttanza elettrica può essere modulata in modo continuo e poi mantenuta anche quando l’alimentazione è rimossa. Controllando con cura piccole vacanze nella struttura atomica del materiale mediante campi elettrici, il dispositivo può conservare in modo affidabile 1024 distinti livelli di conduttanza su un ampio intervallo, mantenendoli per più di un anno. Ugualmente importante, questi livelli variano in modo quasi lineare all’aumentare della tensione di controllo, il che rende possibile mappare un peso matematico desiderato nel filtro di Kalman direttamente su un’impostazione fisica del memtransistor.
Trasformare la matematica in hardware
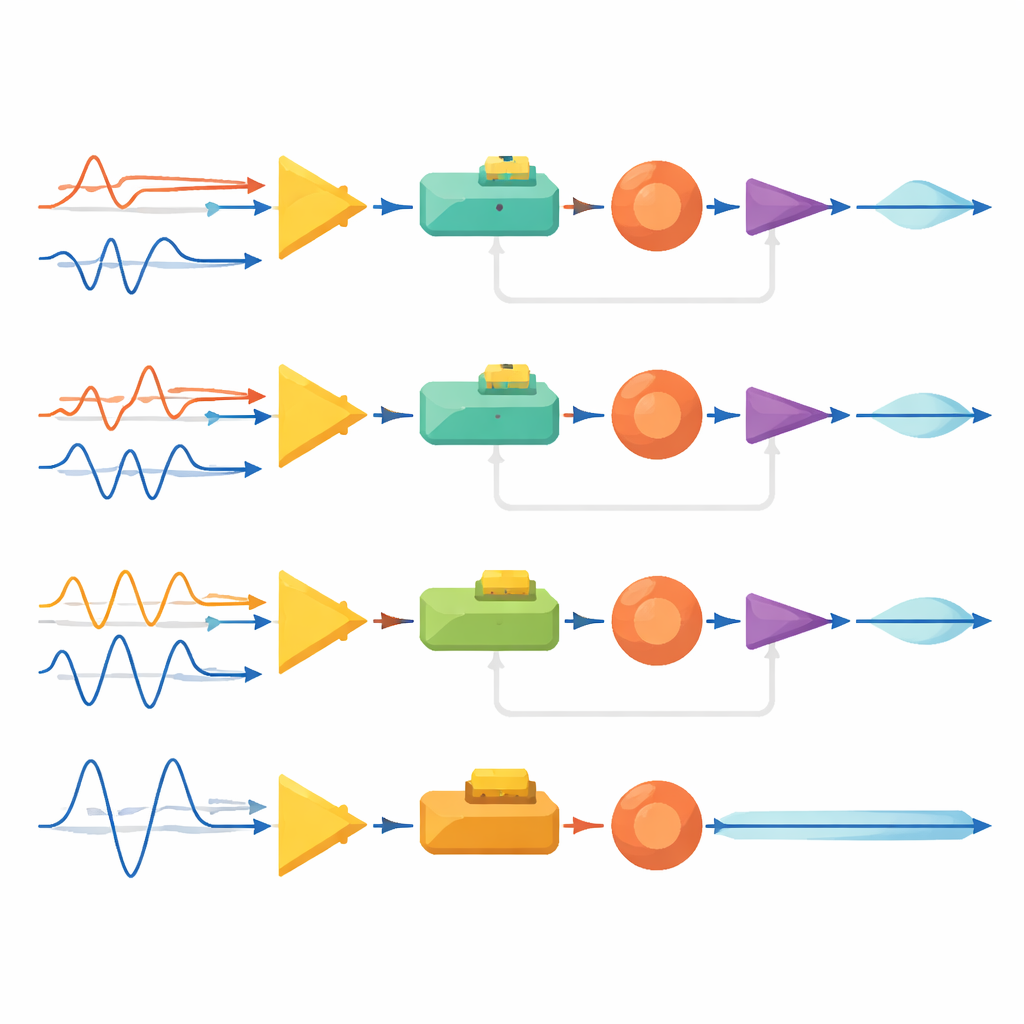
Sulla base di questo dispositivo, i ricercatori progettano una versione analogica di un filtro di Kalman multi-stadio che opera direttamente sulle tensioni dei sensori invece che su numeri digitali. Il circuito è composto da tre stadi concatenati che stimano posizione, velocità e accelerazione del veicolo. All’interno di ogni stadio, operazioni di base come sottrazione, integrazione, addizione e differenziazione sono eseguite da moduli analogici compatti. Il fattore di «guadagno» cruciale che indica al filtro quanto fidarsi delle nuove letture dei sensori rispetto alle proprie previsioni è implementato usando la conduttanza del memtransistor. Semplicemente regolando una tensione di gate, il sistema può variare in modo continuo quanto ascolta LiDAR, radar o sensori di movimento, senza riscrivere alcun software.
Scenari di guida e condizioni difficili
Per mostrare come funziona nella pratica, il team implementa il filtro completo a tre stadi su una scheda elettronica popolata con i loro dispositivi MoS2 e componenti analogici standard. Alimentano il circuito con segnali realistici e rumorosi che imitano ciò che LiDAR, radar e sensori di movimento vedrebbero durante una manovra di sorpasso con cambiamento di corsia in autostrada. Man mano che i segnali attraversano ogni stadio, le uscite diventano più pulite, producendo stime coerenti di posizione, velocità e accelerazione pur preservando cambiamenti netti importanti per la sicurezza, come una frenata improvvisa. Il sistema è particolarmente impressionante quando un sensore diventa inattendibile o bloccato—for instance quando un camion nasconde temporaneamente un altro veicolo al LiDAR. Abbassando in hardware il guadagno associato al sensore compromesso, il filtro analogico sposta automaticamente la sua fiducia verso gli input rimanenti e verso i modelli di movimento precedenti, mantenendo le stime di velocità e accelerazione fluide e fisicamente plausibili.
Cervelli più veloci e snelli per le macchine
Rispetto a un’implementazione digitale standard dello stesso compito di filtraggio, il sistema analogico basato su memtransistor usa circa 13 volte meno energia e completa i calcoli circa 59 volte più velocemente, gestendo contemporaneamente tre variabili chiave del moto. Poiché i dispositivi sono compatti, stabili e compatibili con la produzione su larga scala, questo approccio suggerisce futuri blocchi di elaborazione «in-sensor» o «vicino al sensore» che possono essere collocati vicino a videocamere e radar all’interno di auto, droni e altre macchine connesse. Per i non specialisti, la conclusione è che lasciando che la fisica di materiali avanzati faccia parte della matematica, gli ingegneri possono costruire «cervelli» elettronici più intelligenti, più rapidi ed efficienti che aiutano i sistemi autonomi a navigare in modo affidabile anche quando la vista del mondo è lontana dalla perfezione.
Citazione: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
Parole chiave: guida autonoma, fusione di sensori, filtro di Kalman, memtransistor, calcolo analogico