Clear Sky Science · it
Pipeline TinyML per la classificazione efficiente delle crepe nelle ispezioni della salute strutturale con UAV
Occhi più intelligenti nel cielo
Ponti, dighe e altre strutture critiche invecchiano come le persone, e piccole crepe possono essere segnali d’allarme precoci di possibili cedimenti futuri. Gli ingegneri mandano sempre più spesso piccoli droni a fotografare queste superfici, ma oggi molte di quelle immagini devono essere inviate a server remoti per l’analisi, consumando batteria e mettendo a rischio la privacy dei dati. Questo articolo esplora come ridurre il «cervello» rilevatore di crepe in un minuscolo chip a scala milliwatt che può viaggiare sul drone stesso, rendendo le ispezioni più rapide, sicure e molto più efficienti.
Perché le crepe contano
I metodi tradizionali per monitorare la salute delle strutture spesso si basano su sensori a contatto bullonati o incollati su calcestruzzo e acciaio. Questi sistemi possono essere costosi da installare e tendono a rilevare problemi solo dopo che il danno è progredito. L’ispezione visiva offre una vista più diretta, ma mandare ispettori umani su impalcature o nelle corsie di traffico è lento, rischioso e soggettivo. I piccoli veicoli aerei senza pilota (UAV) dotati di telecamere promettono una soluzione migliore: possono percorrere rapidamente le superfici di ponti e pareti, catturando migliaia di foto dettagliate che rivelano fessure sottili. La sfida è cosa fare con tutti quei dati quando il drone ha solo una autonomia limitata e spesso connessioni di rete inaffidabili.
Il problema di inviare tutto al cloud
La maggior parte dei sistemi attuali segue il modello «acquisizione all’edge – inferenza nel cloud». Il drone si comporta semplicemente come una videocamera volante, inviando in streaming immagini a un computer potente altrove che esegue un modello di deep learning per decidere se ogni porzione di calcestruzzo contiene una crepa. Questo approccio ha senso dal punto di vista computazionale, ma presenta svantaggi importanti. Lo streaming di immagini ad alta qualità prosciuga la batteria del drone, riducendo drasticamente il tempo di volo. Se il collegamento wireless cade o si indebolisce, la missione di ispezione può bloccarsi nel momento meno opportuno. E trasferire immagini dettagliate di infrastrutture strategiche a server remoti solleva comprensibili preoccupazioni di privacy e sicurezza. Queste tensioni motivano un approccio diverso: mettere l’intelligenza direttamente sul drone, su hardware appena più potente di un orologio digitale.
Ridurre il cervello per adattarlo a un chip minuscolo
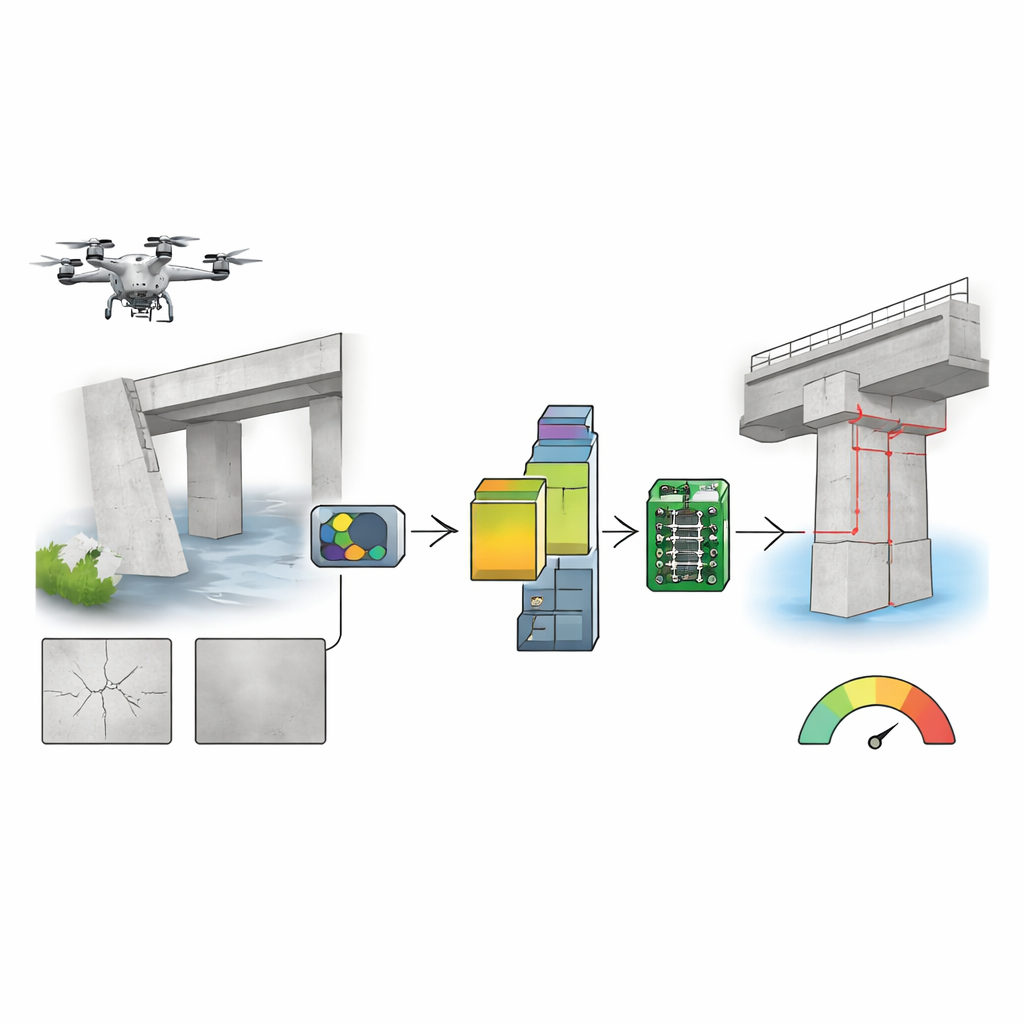
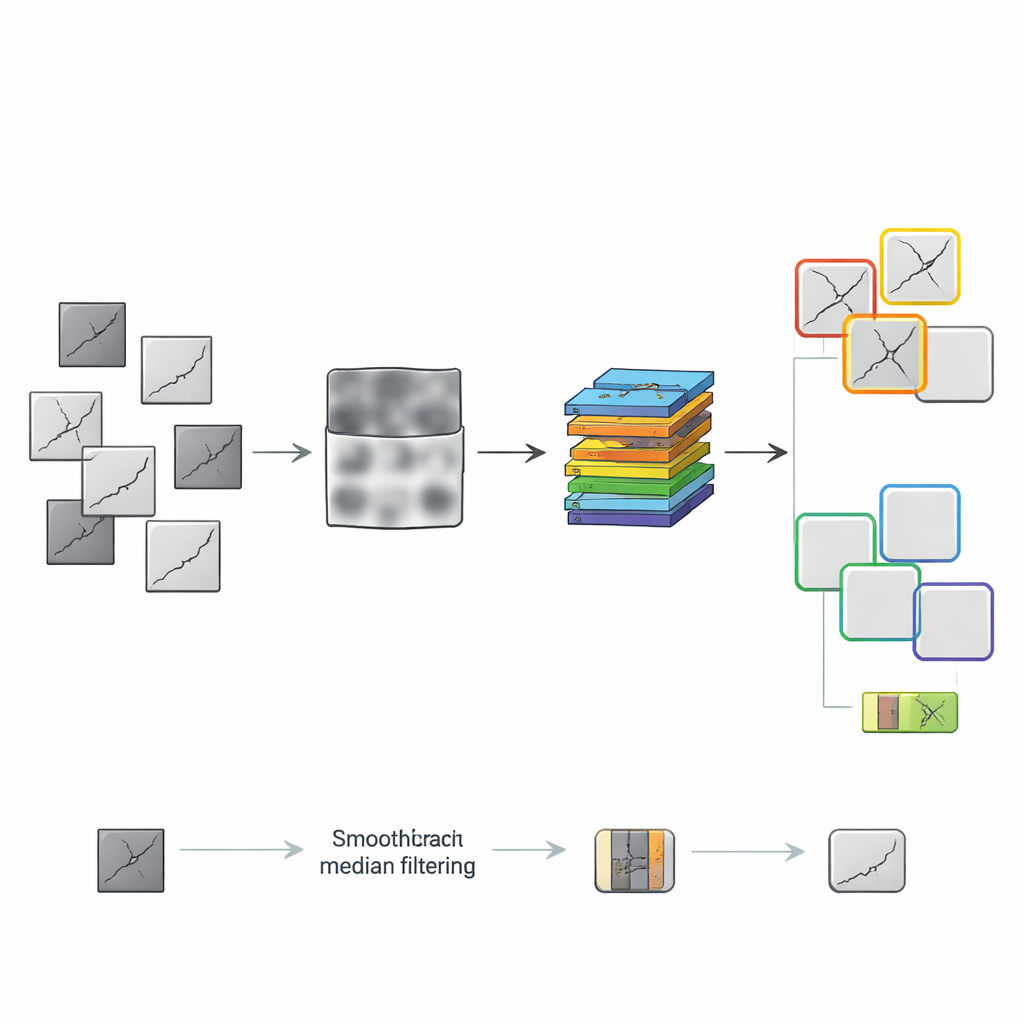
Gli autori hanno costruito una pipeline end-to-end che gira su un microcontrollore a basso consumo, lo STM32H7, usando una rete neurale compatta chiamata MobileNetV1x0.25. Piuttosto che inventare un nuovo modello, si sono concentrati su tutto ciò che lo circonda: come vengono preprocessate le immagini e come il modello viene compresso. Hanno utilizzato un dataset ampiamente studiato di oltre 50.000 immagini di calcestruzzo, suddivise in piccole patch etichettate «crepa» o «nessuna crepa», quindi hanno addestrato e testato diversi modi di preparare queste patch per il modello minuscolo. Una strada ha seguito una sequenza manuale di passaggi come la conversione in scala di grigi, l’aumento del contrasto, la rimozione del rumore, la levigatura e infine la trasformazione in silhouette nettamente in bianco e nero. Un’altra via ha lasciato che una strategia di ricerca «greedy» costruisse una catena di preprocessing passo dopo passo, mantenendo sempre la combinazione che effettivamente migliorava le prestazioni del modello.
Trovare il punto ottimale nella pipeline
I test hanno rivelato che più elaborazione non equivale sempre a migliori risultati. La pipeline manuale, che terminava con una netta binarizzazione, in realtà danneggiava la rete neurale, eliminando le sfumature sottili di tonalità di cui il modello aveva bisogno per individuare crepe fini. Al contrario, la ricerca greedy ha trovato che una coppia più semplice di passaggi—conversione in scala di grigi seguita da un filtro mediano per smussare delicatamente il rumore—dava i risultati migliori. Su questo, il team ha esplorato sistematicamente quattro strategie per comprimere il modello: convertire i suoi valori dalla precisione completa a interi a otto bit, addestrarlo fingendo che fosse quantizzato (quantization-aware training), potare i pesi meno rilevanti e raggruppare valori di peso simili. Hanno provato queste tecniche singolarmente e in combinazione, poi hanno distribuito i modelli risultanti sulla scheda microcontrollore e misurato non solo l’accuratezza, ma anche l’uso della memoria, i tempi di elaborazione e l’energia per decisione.
Piccolo computer, grandi prestazioni
Una configurazione è emersa come la scelta migliore a tutto tondo: un ingresso in scala di grigi con filtro mediano che alimenta un modello che combina pruning con training consapevole della quantizzazione in formato a otto bit. Questa configurazione compatta ha raggiunto un F1-score—un bilanciamento tra intercettare crepe reali ed evitare falsi allarmi—di 0,938, un aumento di oltre 11 punti percentuali rispetto ai precedenti rivelatori di crepe eseguiti on-device. Allo stesso tempo, richiedeva solo circa 2,9 megabyte di memoria di lavoro, 309 kilobyte di spazio programma e meno di mezzo secondo per elaborare ogni patch d’immagine. Ogni decisione consumava circa 0,6 joule di energia. Montato su un drone DJI Mini 4 Pro, eseguire continuamente questo classificatore di crepe ridurrebbe il tempo di volo di solo circa il 4 percento, rispetto a circa un quarto della batteria consumata dalle note schede di edge computing molto più pesanti.
Cosa significa per le ispezioni nel mondo reale
Per i non specialisti, il messaggio chiave è che le valutazioni strutturali serie non richiedono più di spedire immagini sensibili a data center remoti o di portare in volo computer voluminosi e energivori. Sintonizzando con cura come le immagini vengono ripulite e come la rete neurale viene compressa, gli autori dimostrano che un chip delle dimensioni di un pollice può individuare in modo affidabile le crepe nel calcestruzzo consumando a malapena la batteria di un drone. Il sistema rimane ragionevolmente robusto al mosso da movimento e ai cambiamenti di illuminazione, e si comporta in modo sensato anche quando le immagini con crepe sono rare rispetto a molte patch sane. Nel complesso, questi risultati avvicinano le ispezioni basate su droni a un futuro in cui sciami di piccoli UAV economici possono pattugliare silenziosamente le nostre infrastrutture, individuando presto i problemi con intelligenza a bordo efficace ed efficiente.
Citazione: Zhang, Y., Nürnberg, A., Rau, L.S.M. et al. TinyML pipeline for efficient crack classification in UAV-based structural health inspections. Sci Rep 16, 8964 (2026). https://doi.org/10.1038/s41598-026-43534-4
Parole chiave: ispezione con drone, crepe nel calcestruzzo, tiny machine learning, monitoraggio della salute strutturale, edge AI