Clear Sky Science · it
Controllo indipendente dall’hardware per la simulazione di gravità parziale usando un dispositivo robotico a 2 DOF
Perché una gravità più lieve sulla Terra è importante
Mentre l’umanità pianifica viaggi più lunghi verso Luna e Marte, è urgente capire come livelli di gravità non familiari influiranno sul corpo. Eseguire questi test nello spazio è costoso e raro, quindi gli scienziati usano macchine rotanti speciali sulla Terra, chiamate clinostati, per imitare la bassa gravità su cellule e piccoli tessuti. Questo articolo presenta un nuovo modo di controllare un simile dispositivo in modo che possa riprodurre in modo affidabile non solo l’assenza di peso, ma anche le attrazioni più deboli della Luna, di Marte e persino livelli di gravità vicini a quelli terrestri—senza essere strettamente vincolato a un singolo motore o componente hardware.
Giriamo per simulare la gravità
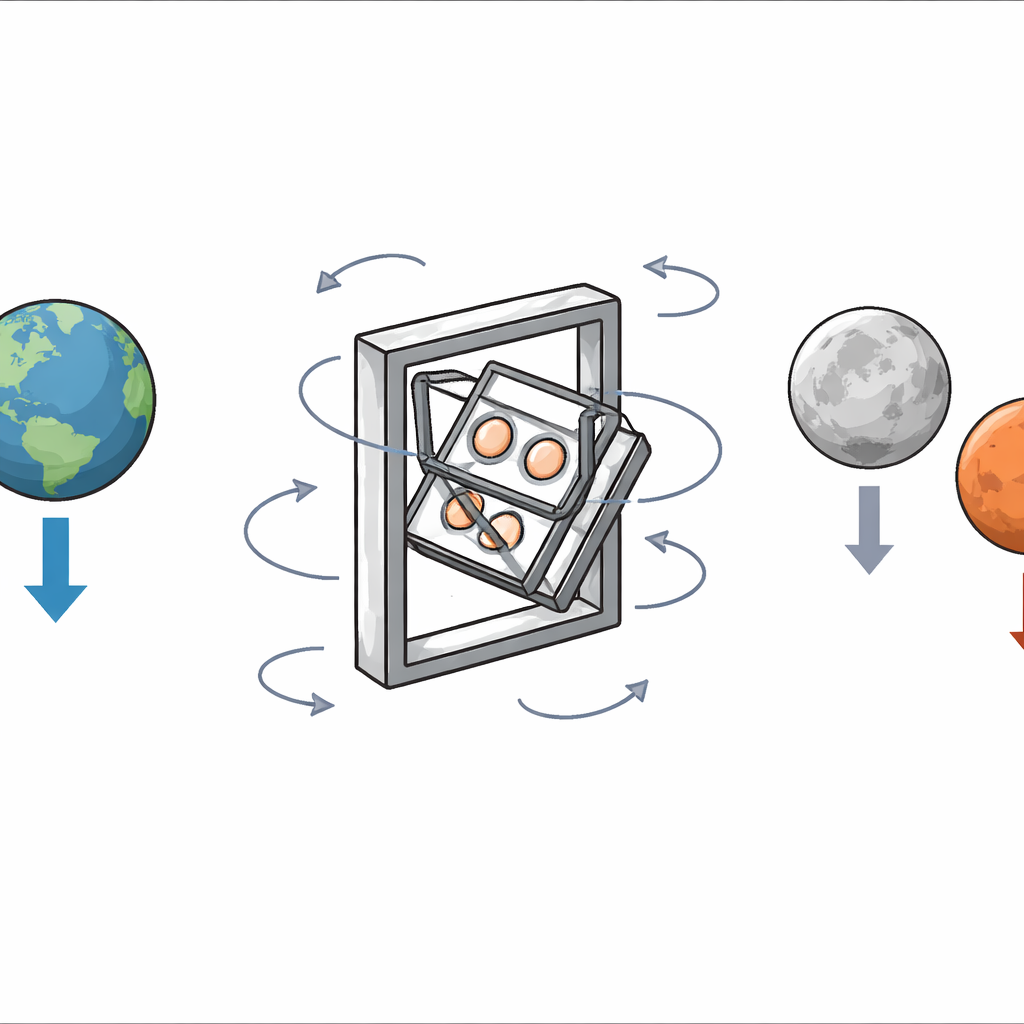
Vicino alla superficie terrestre, la gravità è praticamente diretta verso il basso ovunque. Un clinostato tridimensionale prende un piccolo campione—per esempio cellule o organoidi in una piastra—e lo fa ruotare lentamente attorno a due assi perpendicolari. Poiché l’orientamento del campione cambia continuamente, la direzione della gravità “vista” dalle cellule si modifica costantemente e, nel tempo, queste forze si mediando. Quando le rotazioni sono organizzate correttamente, la gravità mediata nel tempo può avvicinarsi a zero, imitando la microgravità orbitale. Per molti anni questa idea semplice è stata usata per studiare perdita muscolare, indebolimento osseo, cambiamenti immunitari e altri effetti simili a quelli spaziali senza lasciare il suolo.
Dalla condizione di assenza di peso a una gravità “simile alla Luna”
Più recentemente, i ricercatori hanno compreso che non basta studiare solo l’assenza di peso. Astronauti su Luna o Marte vivranno con una gravità più debole, non assente. Per colmare questa lacuna è stato introdotto il concetto di gravità parziale simulata media nel tempo: invece di far scomparire la forza media, il dispositivo mantiene la gravità orientata leggermente più spesso in una direzione rispetto alle altre. Questo bias crea una spinta media compresa tra zero e la gravità terrestre completa, permettendo di imitare condizioni come 0,17 g della Luna o 0,38 g di Marte. I metodi di controllo precedenti potevano ottenere questo risultato, ma dipendevano fortemente dai motori e dalla meccanica impiegati e non riuscivano a produrre gravità parziali superiori a circa 0,44 g.
Un nuovo modo di governare il rotore
L’innovazione centrale di questo studio è controllare il motore esterno del clinostato basandosi sull’angolo raggiunto, invece che sul tempo. I metodi precedenti prescrivevano la velocità istantanea di rotazione, ma l’hardware reale non segue mai perfettamente quel piano: piccoli ritardi e limiti del motore causano deriva angolare, e quegli errori si accumulano, costringendo i ricercatori a introdurre loop di feedback aggiuntivi tarati su ciascun dispositivo. Qui gli autori riprogettano la regola di controllo in modo che la velocità angolare sia data direttamente come funzione dell’angolo corrente. Questo cambiamento, a prima vista piccolo, riduce molto la crescita degli errori e rende il metodo largamente indipendente dalla potenza del motore e dall’inerzia. Contemporaneamente, il motore interno è comandato con uno schema pseudo‑casuale in modo che la gravità non percorra sempre lo stesso tragitto, migliorando l’affidabilità sperimentale.
Portare la gravità più vicina a quella terrestre
Utilizzando simulazioni al computer, il gruppo ha mappato come un parametro di controllo chiave, chiamato α, influenzi la gravità media finale. Aumentando α, è stato possibile innalzare la gravità parziale simulata fino a circa 0,68 g—già molto superiore al precedente limite di 0,44 g. Per spingersi oltre, hanno introdotto un trucco di “tempo di pausa”: ogni volta che la struttura esterna raggiunge l’angolo in cui la gravità si allinea con la spinta media desiderata, il motore si arresta brevemente. Durante questa pausa, il campione avverte una trazione stabile in quella direzione, rafforzando il bias. Le simulazioni hanno mostrato che pause più lunghe spingono la gravità effettiva più vicina all’1 g terrestre, e gli esperimenti hanno confermato valori fino a circa 0,81 g con una discrepanza di circa l’1% rispetto ai risultati previsti nella gamma più accurata.
Test su Luna, Marte e oltre
I ricercatori hanno costruito un clinostato a due assi azionato da servomotori commerciali e hanno monitorato la direzione della gravità usando un sensore inerziale montato al centro. Hanno testato una gamma di valori di α e di tempi di pausa, misurando quanto rapidamente la gravità media si stabilizzava e quanto gli esperimenti corrispondevano alle simulazioni. Per valori moderati di α corrispondenti a 0,33–0,63 g, la discrepanza era tipicamente attorno all’1% o meno. Simulazioni ed esperimenti per condizioni simili a Luna e Marte hanno prodotto spinte medie vicine a 0,17 g e 0,38 g, pur mantenendo percorsi della gravità variabili tra una prova e l’altra. Gli autori hanno anche esplorato i limiti pratici imposti dalla risoluzione del motore e dai ritardi di risposta, offrendo linee guida semplici per scegliere attuatori e margini di sicurezza in modo che altri laboratori possano riprodurre livelli precisi di gravità parziale.
Che cosa significa per la salute spaziale futura
In termini concreti, questo lavoro trasforma un sistema rotante complesso e sensibile all’hardware in un simulatore di gravità parziale più plug‑and‑play. Legando la velocità del motore all’angolo e aggiungendo pause controllate, il metodo può imitare fedelmente un’ampia gamma di livelli di gravità, dallo spazio profondo a Luna e Marte fino ad avvicinarsi alla Terra, senza continui aggiustamenti manuali dei loop di controllo. Questa flessibilità rende più semplice per molti gruppi di ricerca studiare come cellule, tessuti e organoidi rispondono a livelli specifici di gravità, aiutandoci a prevedere rischi per la salute e a progettare contromisure per missioni spaziali di lunga durata.
Citazione: Kim, Y.J., Park, S. & Kim, S. Hardware-independent control for partial gravity simulation using a 2-DOF robotic device. Sci Rep 16, 9727 (2026). https://doi.org/10.1038/s41598-026-40665-6
Parole chiave: simulazione di gravità parziale, clinostato, biologia spaziale, ricerca sulla microgravità, controllo del movimento robotico