Clear Sky Science · it
Mappatura semantica sensibile agli oggetti mediante funzioni di densità di probabilità per il rilocalizzazione interna e la pianificazione dei percorsi
Perché contano mappe indoor più intelligenti
Man mano che i robot domestici e di servizio escono dai laboratori e entrano in appartamenti reali, devono fare più che evitare muri e mobili. Per essere davvero utili, un robot dovrebbe capire che un letto di solito indica una camera da letto, o che un frigorifero fa pensare a una cucina. Questo articolo presenta un nuovo modo per i robot di “vedere” gli spazi interni attraverso gli oggetti che definiscono ogni stanza, permettendo loro di capire dove si trovano e scegliere percorsi più coerenti con l’uso che le persone fanno delle proprie case.
Vedere le stanze attraverso i loro oggetti quotidiani
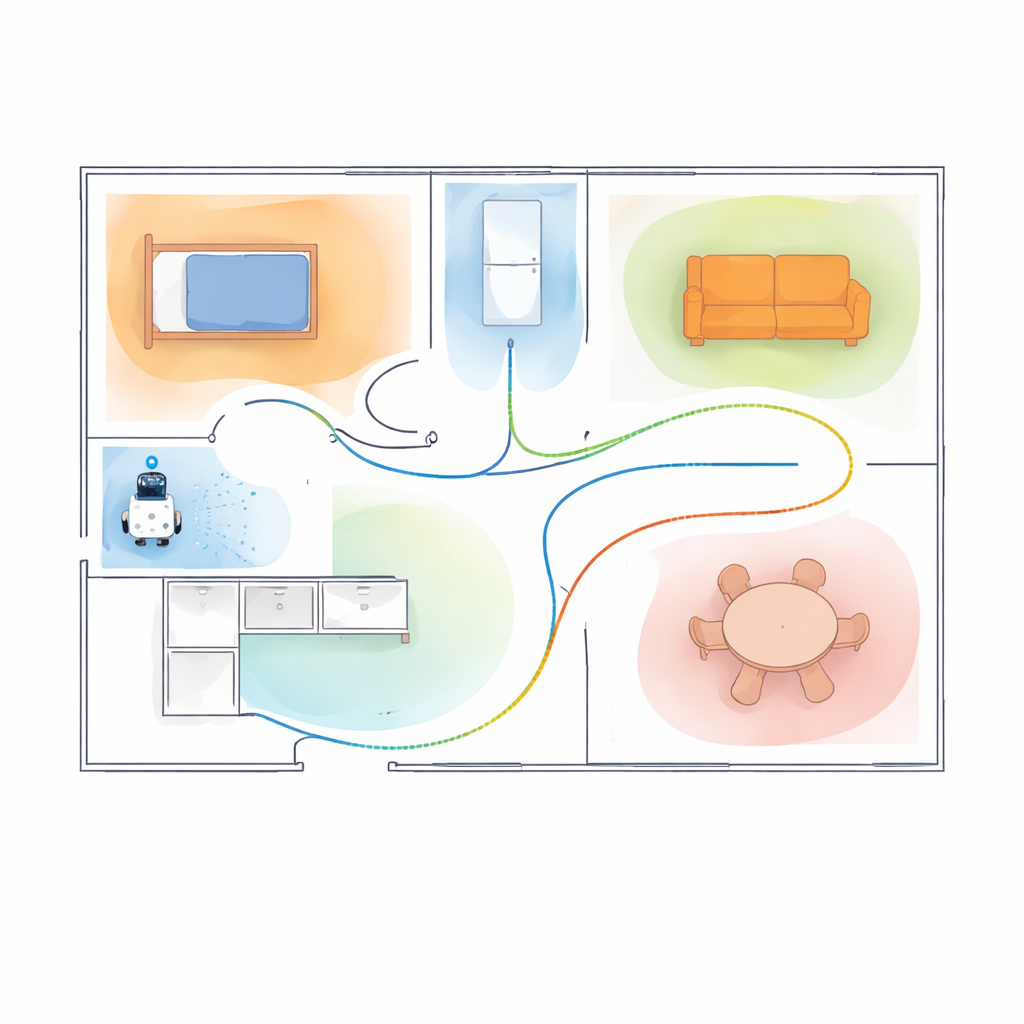
Le mappe tradizionali per robot si concentrano o sulla geometria pura o su simboli astratti. Le mappe a griglia costruite da scansioni laser catturano forme dettagliate, ma diventano pesanti da memorizzare e lente da interrogare, e possono spingere i robot a percorsi rigidi e a scacchiera. I grafi ad alto livello di stanze e porte sono più facili da gestire, ma scartano i dettagli fini necessari per una guida precisa. Gli autori colmano questo divario organizzando le mappe attorno alle stanze e agli oggetti statici chiave al loro interno – letti, divani, frigoriferi, tavoli e simili. Ogni stanza è delineata su una pianta piana e ogni classe di oggetto importante ha il proprio livello, così diversi tipi di arredo non si sovrascrivono a vicenda.
Trasformare i mobili in morbide nuvole di probabilità
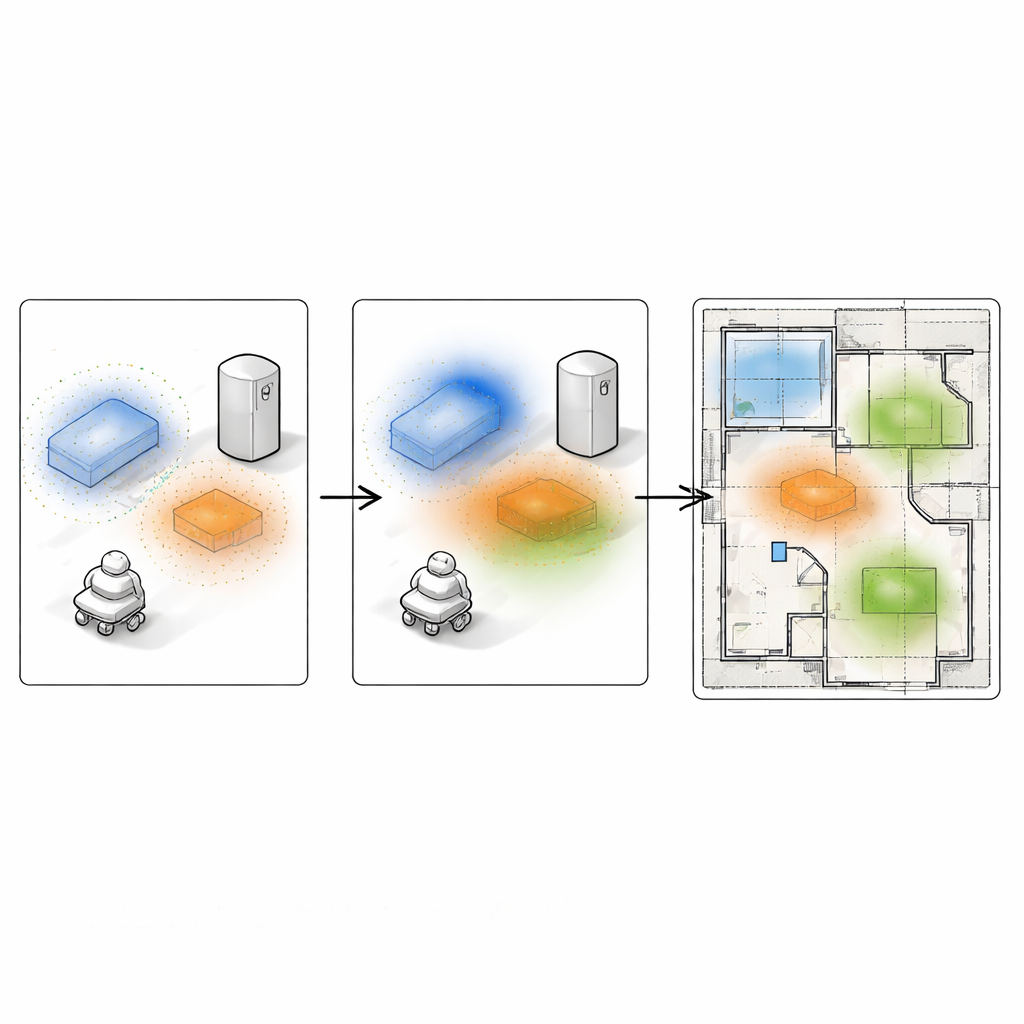
Invece di rappresentare ogni oggetto come una scatola dai bordi netti, il metodo converte le scansioni 3D dei mobili in mappe di calore morbide sul pavimento. Il robot prima ricostruisce ogni stanza in 3D usando una camera RGB‑D e strumenti standard, poi etichetta semanticamente i punti appartenenti a oggetti come muri, letti o sedie. Per ogni tipo di oggetto all’interno di una stanza, si individuano cluster di punti e li si proietta sul pavimento. A partire da questi cluster, il sistema stima una densità di probabilità continua – una macchia morbida che è massima dove l’oggetto è più probabile e sfuma dolcemente verso l’esterno. Sovrapponendo queste macchie per tipo di oggetto si ottiene una mappa stratificata e compatta che conserva sia il significato degli oggetti sia la loro forma approssimativa, gestendo in modo naturale rumore e viste parziali.
Permettere ai robot di riscoprire la propria posizione
Un uso importante di questa mappa centrata sugli oggetti è aiutare un robot a rilocalizzarsi quando non ha idea di dove si trovi sulla pianta – un problema comune quando il robot si riattiva o è stato spostato. Il robot osserva con la sua camera di profondità, rileva gli oggetti in vista e costruisce il proprio piccolo insieme di macchie di probabilità per quella scena parziale. Poi, un algoritmo di ricerca evolutiva esplora molte posizioni candidate del robot sulla mappa dell’edificio. Per ogni posa candidata, le macchie locali vengono sovrapposte alla mappa globale e la loro similarità è misurata tramite una distanza statistica. I confini delle stanze e i controlli di linea di vista scartano posizioni impossibili, come vedere un frigorifero attraverso un muro. Nel corso di molte generazioni, la popolazione di pose candidate evolve verso la posizione in cui gli oggetti osservati corrispondono meglio ai campi di probabilità memorizzati, fornendo una stima robusta della posizione e dell’orientamento del robot.
Pianificare percorsi che rispettano l’uso umano dello spazio
La stessa mappa guida anche il modo in cui il robot si muove. Poiché ogni tipo di oggetto è rappresentato come un campo d’influenza morbido, al robot si possono indicare aree da favorire o evitare regolando pesi numerici. I letti possono diventare regioni da evitare di notte, mentre i tavoli possono diventare attrattori quando si cerca un oggetto. Queste preferenze semantiche sono combinate con una mappa degli ostacoli standard e un margine di sicurezza attorno ai muri per formare un unico paesaggio di costi sulla pianta. Un pianificatore di percorsi classico trova quindi rotte che non solo evitano collisioni ma seguono anche i bias sociali o legati al compito desiderati. Esperimenti su un dataset realistico e in un appartamento arredato reale mostrano che questi percorsi semanticamente influenzati seguono meglio le preferenze intenzionate, talvolta con piccoli incrementi nella lunghezza del percorso, e possono risultare più fluidi nelle case reali.
Cosa significa questo per i robot di tutti i giorni
In termini semplici, questo lavoro insegna ai robot a pensare alle case come fanno le persone: come stanze definite dai loro arredi, non solo come scatole vuote con muri. Avvolgendo ogni oggetto chiave in una morbida nuvola di probabilità, una singola mappa compatta può supportare sia «Dove sono?» sia «Come dovrei arrivarci?» senza bisogno di modelli separati e specifici per il compito. I test dimostrano che questo approccio aiuta i robot a localizzarsi in modo più affidabile in stanze ingombre o simili tra loro e a scegliere percorsi più consoni alle aspettative umane. Con l’evolversi di queste idee, i futuri robot domestici potrebbero muoversi con maggiore cortesia e intelligenza, attraversando i nostri spazi con un’attenzione che appare molto meno meccanica.
Citazione: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
Parole chiave: localizzazione di robot indoor, mappatura semantica, navigazione basata sugli oggetti, mappe probabilistiche per la robotica, pianificazione dei percorsi