Clear Sky Science · it
Traversabilità probabilistica profonda con adattamento a tempo di test per la navigazione di rover planetari consapevole dell’incertezza
Perché una guida del rover più sicura è importante
Quando mandiamo robot su ruote sulla Luna o su Marte, devono attraversare sabbia, rocce e pendii senza aiuto umano. Una singola valutazione sbagliata sulla morbidezza del terreno può lasciare un rover da miliardi di dollari bloccato per sempre, come è accaduto quando il rover Opportunity della NASA rimase impantanato in sabbia ondulata per settimane. Questo studio introduce un nuovo modo per i rover di “percepire” quanto rischioso sia il terreno davanti a loro, prendere decisioni di percorso più sicure e persino imparare dagli errori mentre si muovono.
Il terreno soffice come pericolo nascosto
Su altri mondi, gli ostacoli più pericolosi non sono sempre massi o dirupi, che le fotocamere vedono facilmente, ma macchie apparentemente lisce di suolo sciolto. Quando le ruote del rover slittano su questo tipo di terreno, il veicolo scivola, avanza molto più lentamente del previsto, spreca energia e può rimanere immobilizzato in modo permanente. I sistemi di navigazione tradizionali si concentrano principalmente sui pericoli geometrici visibili—quello che sembra un ostacolo e quello che non lo è—senza catturare appieno come il terreno si comporterà sotto le ruote. Allo stesso tempo, i metodi di apprendimento automatico che cercano di prevedere lo slittamento dalle immagini e dalle mappe 3D possono sbagliare in condizioni non familiari, come illuminazione nuova o pendenze più ripide, e di solito non quantificano quanto siano incerte le loro previsioni.
Insegnare a un rover a ragionare sul rischio
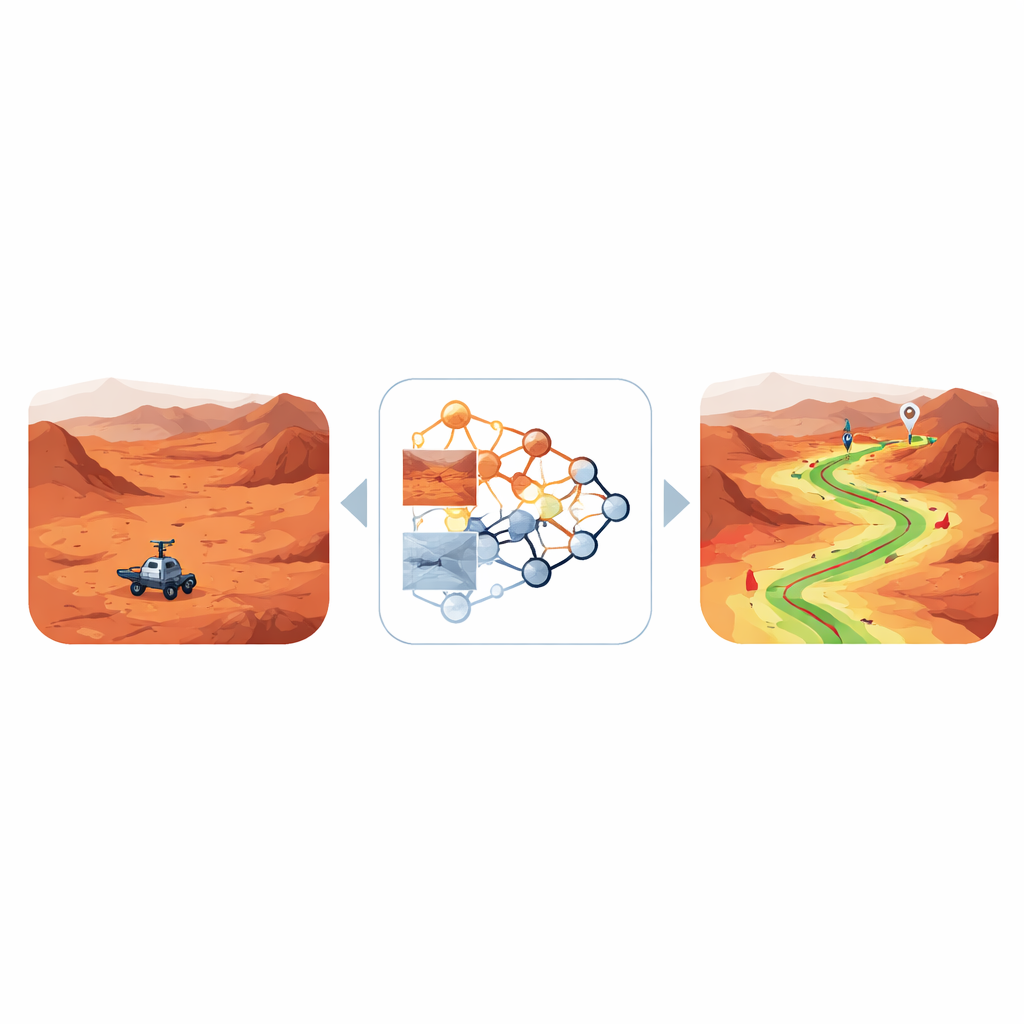
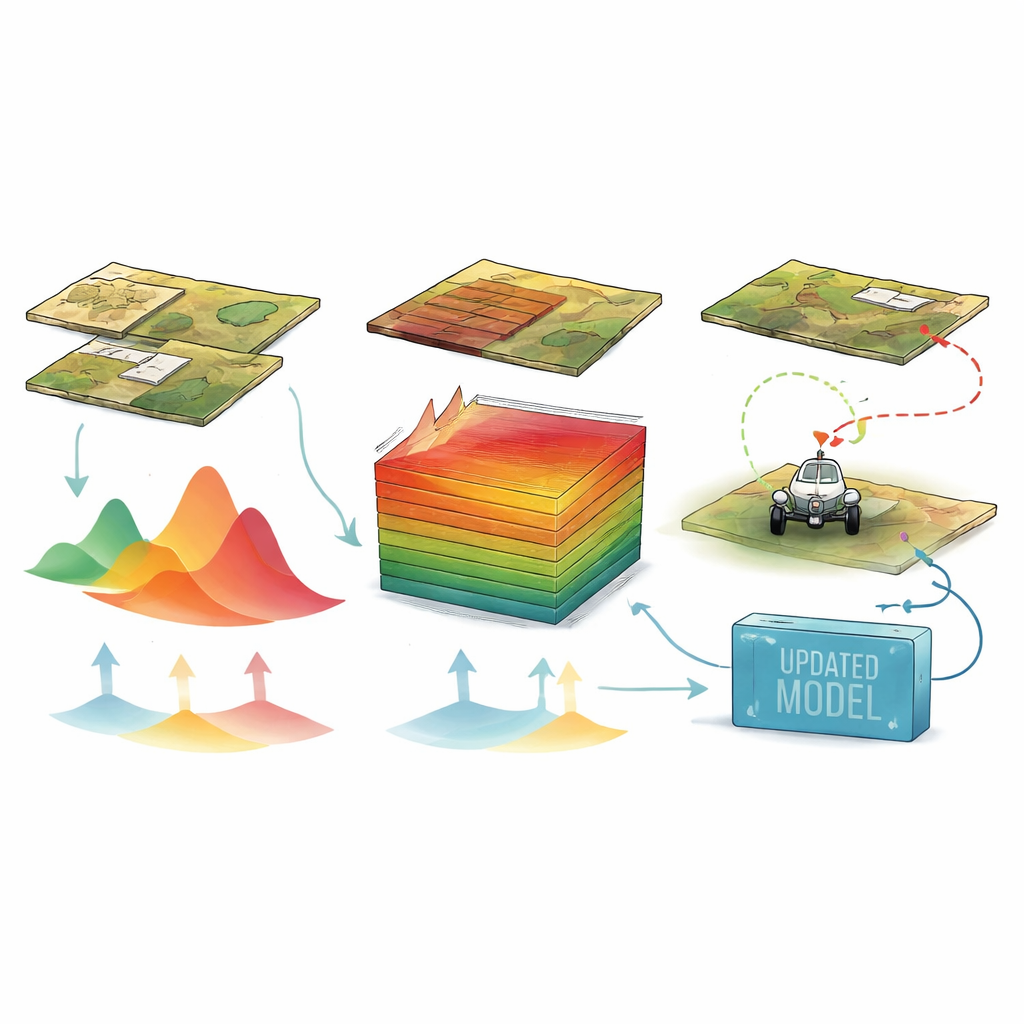
Gli autori propongono un framework integrato di apprendimento e pianificazione che chiamano traversabilità probabilistica profonda. Invece di produrre una singola “migliore ipotesi” su quanto slitteranno le ruote su ogni porzione di terreno, il loro modello prevede una distribuzione di probabilità completa dei possibili slittamenti, basata su immagini a colori e pendenza locale. Un insieme di reti neurali profonde osserva il paesaggio dall’alto e, per ogni possibile mossa su una griglia, fornisce sia un valore atteso di slittamento sia la sua incertezza. Da questa distribuzione, il sistema traduce lo slittamento in una velocità di marcia effettiva e, in ultima analisi, in un costo di tempo di percorrenza per ogni passo. Le aree in cui il rover rischia di impantanarsi ricevono costi molto elevati; le aree in cui la previsione è favorevole e sicura ricevono costi bassi. Un algoritmo standard di ricerca del percorso trova quindi una rotta che bilancia distanza breve e basso rischio di immobilizzazione.
Lasciare che il rover impari mentre procede
Una sfida importante nell’esplorazione planetaria è che le condizioni che un rover incontra all’arrivo possono differire significativamente dai dati di addestramento: le pendenze possono essere più ripide, le proprietà del suolo sconosciute o l’illuminazione molto diversa. Per far fronte a questo, il framework include un meccanismo di adattamento a tempo di test. Mentre il rover si muove, misura lo slittamento effettivo che sperimenta. Dopo ciascun breve spostamento, queste misure vengono usate per aggiustare delicatamente strati aggiuntivi di “scala e shift” nelle reti neurali mantenendo fissi i pesi originali. Questa strategia permette al modello di adattarsi rapidamente a nuovi terreni usando solo poche osservazioni, preservando al contempo ciò che ha già imparato sulle condizioni precedentemente viste. Le previsioni aggiornate vengono poi reinserite nella ripianificazione, così che il percorso scelto possa migliorare in tempo reale.
Sottoporre il sistema a test severi
Poiché i dati reali dei rover coprono solo tipi limitati di terreno, il team ha costruito un ampio dataset sintetico di paesaggi di tipo marziano. Hanno combinato topografie aspre generate al computer con dieci classi di terreno nascoste, ciascuna con il proprio colore e comportamento di slittamento, e hanno variato sia la pendenza sia la direzione dell’illuminazione per creare scenari familiari e non familiari. In migliaia di missioni simulate, il nuovo metodo è stato confrontato con due pianificatori all’avanguardia che o ignorano l’incertezza o la usano in modo meno diretto. In condizioni familiari, tutti gli approcci hanno mostrato prestazioni simili. Ma nei casi più sfidanti—illuminazione scarsa e terreni ripidi tipo cratere—l’approccio della traversabilità probabilistica profonda ha ottenuto tassi di successo più alti e uno slittamento massimo inferiore, mantenendo tempi di percorrenza competitivi. Quando l’adattamento in tempo reale era abilitato, il sistema ha ulteriormente ridotto gli errori di previsione e migliorato la sicurezza, specialmente in ambienti molto diversi dall’addestramento.
Cosa significa per le missioni future
Per un lettore generale, il messaggio chiave è che questo lavoro fornisce ai rover planetari un modo più prudente e autoconsapevole di muoversi su terreni insidiosi. Invece di affidarsi ciecamente a una singola previsione su come le loro ruote aderiranno, i rover possono ora valutare sia il comportamento atteso sia l’incertezza, scegliendo percorsi che sono veloci ma poco probabili a lasciarli bloccati. Imparando continuamente dalla propria esperienza di slittamento, possono adattarsi a nuove sabbie, pendenze e condizioni di luce senza bisogno di soccorso umano. Man mano che le agenzie spaziali pianificano missioni di superficie più lunghe e ambiziose, una navigazione consapevole dell’incertezza potrebbe contribuire a far sì che robot preziosi trascorrano più tempo ad esplorare nuovi obiettivi scientifici e meno tempo a liberarsi dai guai.
Citazione: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
Parole chiave: navigazione di rover planetari, attraversabilità del terreno, pianificazione consapevole dell’incertezza, robotica e apprendimento automatico, esplorazione autonoma