Clear Sky Science · it
InFoRM: un modello inverso e diretto unificato per il controllo sensomotorio
Come il cervello potrebbe semplificare il movimento
Ogni volta che afferri una tazza o tocchi una tastiera, il tuo cervello deve trasformare un’intenzione ("muovere la mano lì") in un’attività muscolare precisa prevedendo allo stesso tempo quale sarà la sensazione risultante. Le teorie classiche assumono che il cervello usi due calcolatori interni separati per questo compito: uno per generare i comandi ai muscoli e un altro per prevedere le sensazioni in arrivo. Questo studio esplora un’alternativa audace: che un unico circuito unificato possa gestire entrambi gli aspetti del problema—risparmiando energia e migliorando le prestazioni.
Due modi di pensare il controllo
I modelli tradizionali del controllo del movimento immaginano un sistema diviso. Una parte «inversa» converte un risultato desiderato (per esempio la traiettoria della punta delle dita nello spazio) nelle attivazioni muscolari necessarie, mentre una parte «diretta» predice come il corpo si muoverà e quale feedback sensoriale ne deriverà. Questi due elementi vengono spesso rappresentati come caselle distinte nei testi. Tuttavia, dati di imaging cerebrale e lesionistici non supportano chiaramente una separazione così netta, e alcune aree cerebrali sembrano essere coinvolte in entrambi i ruoli. Inoltre, mantenere due circuiti complessi potrebbe essere metabolicamente dispendioso. Gli autori si chiedono quindi se una rete flessibile unica possa imparare a produrre comandi motori, prevedere il feedback sensoriale e persino inferire l’obiettivo originale a partire solo dai segnali interni.
Una singola rete che fa tutto
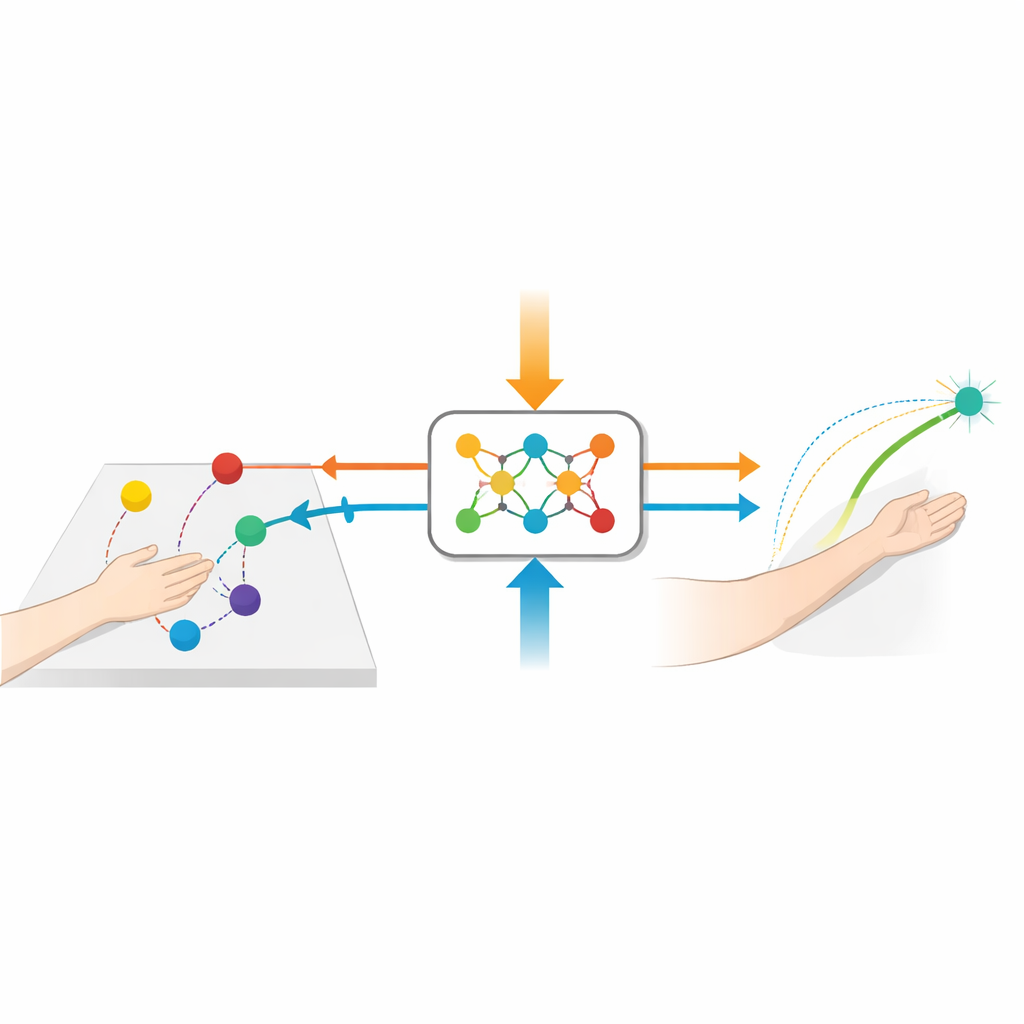
Per mettere alla prova questa idea, i ricercatori hanno costruito un modello computazionale chiamato InFoRM (acronimo di inverse–forward–recognition model). Invece di due moduli impilati, InFoRM utilizza una singola rete neurale ricorrente—una rete di unità interconnesse—nella quale confluiscono segnali di obiettivo, motori e sensoriali. Da questo «serbatoio» comune di attività sono addestrati in parallelo tre lettori: uno ricostruisce la traiettoria desiderata della mano, uno genera le attivazioni muscolari necessarie per conseguirla e uno predice i segnali sensoriali (lunghezza e velocità muscolare) che ne deriverebbero. Crucialmente, le stesse dinamiche interne supportano tutti e tre i compiti contemporaneamente, così il modello può condividere informazioni tra di essi anziché imparare ciascuno in isolamento.
Mettere il modello alla prova nel mondo reale
Il team ha registrato movimenti reali del braccio da volontari che raggiungevano ritmicamente da un punto centrale bersagli disposti in diverse direzioni e distanze su un piano. I dati di motion-capture e un modello muscoloscheletrico dettagliato hanno fornito, per ogni movimento, la traiettoria della punta delle dita, le stimate attivazioni muscolari e i corrispondenti segnali di tipo sensoriale dai muscoli. InFoRM è stato addestrato su un sottoinsieme di direzioni e poi testato in diversi scenari impegnativi: riprodurre movimenti appresi, generare movimenti in nuove direzioni intermedie ("morphing" tra ciò che aveva visto) e gestire transizioni naturali e auto-selezionate tra i bersagli. Per confronto, gli autori hanno anche costruito architetture di controllo più classiche con reti inverse e dirette separate, oltre a varianti potenziate che disponevano di informazioni di input aggiuntive.

Previsioni più accurate con meno risorse
In tutti i test, la rete unificata InFoRM ha riprodotto i movimenti registrati e i segnali muscolari con maggiore accuratezza rispetto a qualsiasi architettura separata. Le sue uscite seguivano i segnali reali più da vicino e con errori più piccoli, anche quando le si chiedeva di interpolare verso direzioni non addestrate o di affrontare sequenze realistiche e non predefinite di bersagli. Importante, InFoRM ha raggiunto questa maggiore precisione utilizzando un numero di neuroni comparabile o inferiore e richiedendo molti meno cicli di addestramento, suggerendo una migliore efficienza computazionale. Il fatto che abbia inoltre superato la migliore versione ampliata del modello di controllo—quella che aveva accesso alla stessa combinazione di informazioni di obiettivo, motorie e sensoriali—suggerisce che il vantaggio derivi dall’integrazione di tutto in un unico circuito ricorrente, non solo dall’avere input più ricchi.
Cosa significa per la comprensione del cervello
I risultati supportano l’idea che il cervello potrebbe non mantenere motori «diretti» e «inversi» nettamente separati per il controllo del movimento. Al contrario, un unico circuito riccamente connesso potrebbe contenere implicitamente entrambi, con comandi motori e predizioni che emergono dalle stesse dinamiche sottostanti. Questa prospettiva si integra bene con le visioni moderne del cervello come macchina predittiva, costantemente impegnata a generare e aggiornare aspettative sul proprio corpo e sul mondo. Pur essendo il modello ancora un’astrazione semplificata e con dettagli biologici—come i ritardi nervosi e le sinapsi variabili—da esplorare ulteriormente, InFoRM dimostra che un progetto unificato può essere al contempo potente ed economico, offrendo uno schema alternativo convincente per come il nostro sistema nervoso potrebbe controllare il movimento.
Citazione: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
Parole chiave: controllo sensomotorio, modelli interni, reti neurali, apprendimento motorio, processamento predittivo