Clear Sky Science · it
Migliorare l’estrazione delle strade da telerilevamento tramite DS-Unet con attenzione complementare e gradienti surrogate
Mappe più nitide dallo spazio
Le mappe digitali moderne si basano in larga misura su foto satellitari e aeree, ma tracciare automaticamente le strade in queste immagini è sorprendentemente complesso. Ombre, alberi, sentieri sterrati e variazioni stagionali possono confondere i programmi, causando interruzioni o falsi tracciati sulle mappe. Questo articolo introduce un nuovo metodo di analisi delle immagini, chiamato DS-Unet, che mira a disegnare reti stradali più pulite e complete dalle immagini di telerilevamento, rendendo le mappe future più affidabili per la navigazione, la pianificazione e la risposta ai disastri.
Perché trovare le strade è così difficile
Visti dall’alto, i tracciati reali si snodano tra città, terreni agricoli e stabilimenti, spesso nascosti da edifici, vegetazione e luce variabile. I sistemi di deep learning tradizionali, che già alimentano molti servizi di mappatura, analizzano le immagini a porzioni. Sono efficaci nel riconoscere pattern locali, come una fascia di asfalto, ma faticano a comprendere come pezzi distanti si connettano in una strada continua. Di conseguenza possono perdere vicoli stretti in borghi densi, frammentare autostrade lunghe o scambiare caratteristiche dall’aspetto simile, come sentieri sterrati o segnature di parcheggio, per vere strade.
Un nuovo modo di combinare ciò che vede la rete
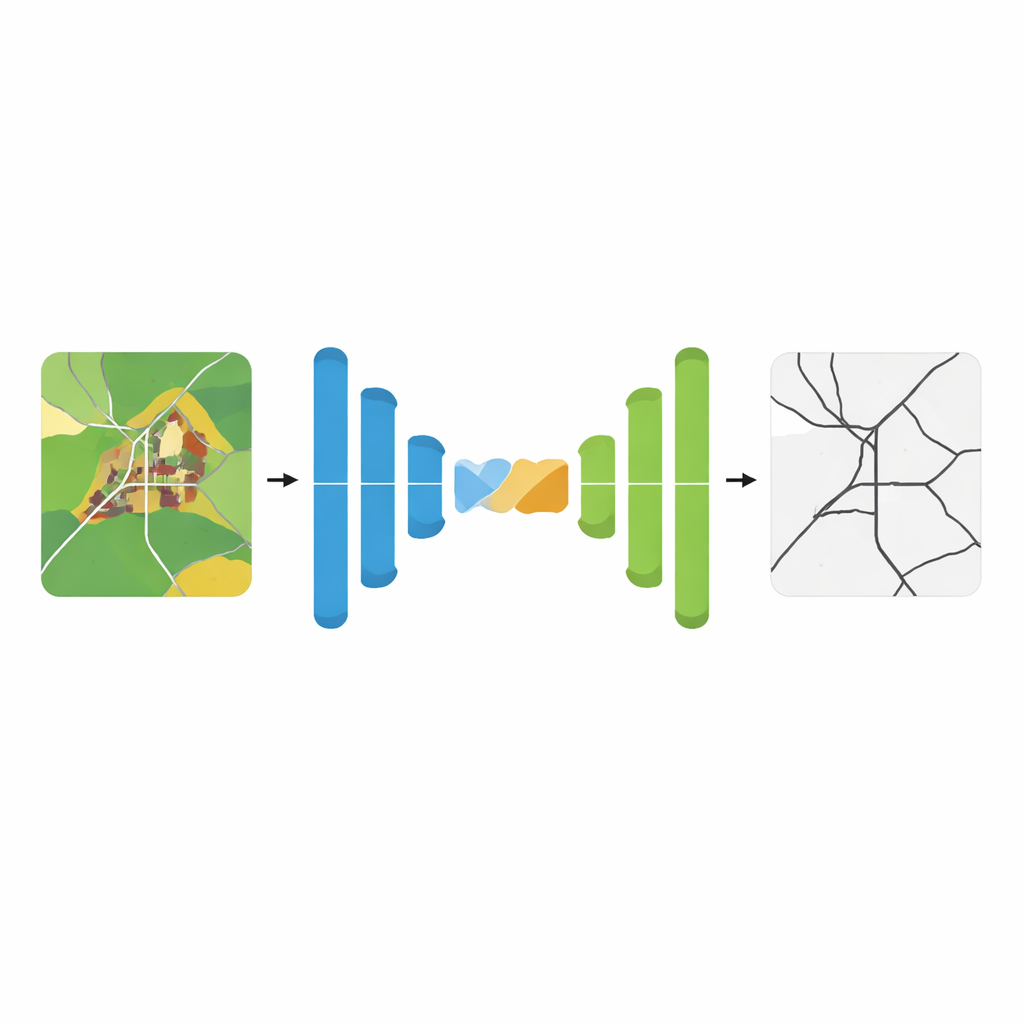
DS-Unet si basa su un design di rete neurale molto diffuso che elabora un’immagine tramite un percorso contrattivo (che riepiloga i dettagli) e un percorso espansivo (che ricostruisce una previsione a risoluzione piena). I progetti classici collegano questi percorsi con scorciatoie semplici che trasferiscono i primi dettagli visivi. Gli autori sostengono che queste scorciatoie mescolino le informazioni in modo rozzo, fondendo spesso i bordi utili delle strade con pattern di sfondo distraenti. DS-Unet le sostituisce con un connettore più intelligente, il Complementary Attention Fusion Module, che cerca di evidenziare i dettagli rilevanti mantenendo al contempo la visione d’insieme.
Lasciare che la rete si concentri e guardi in ampio
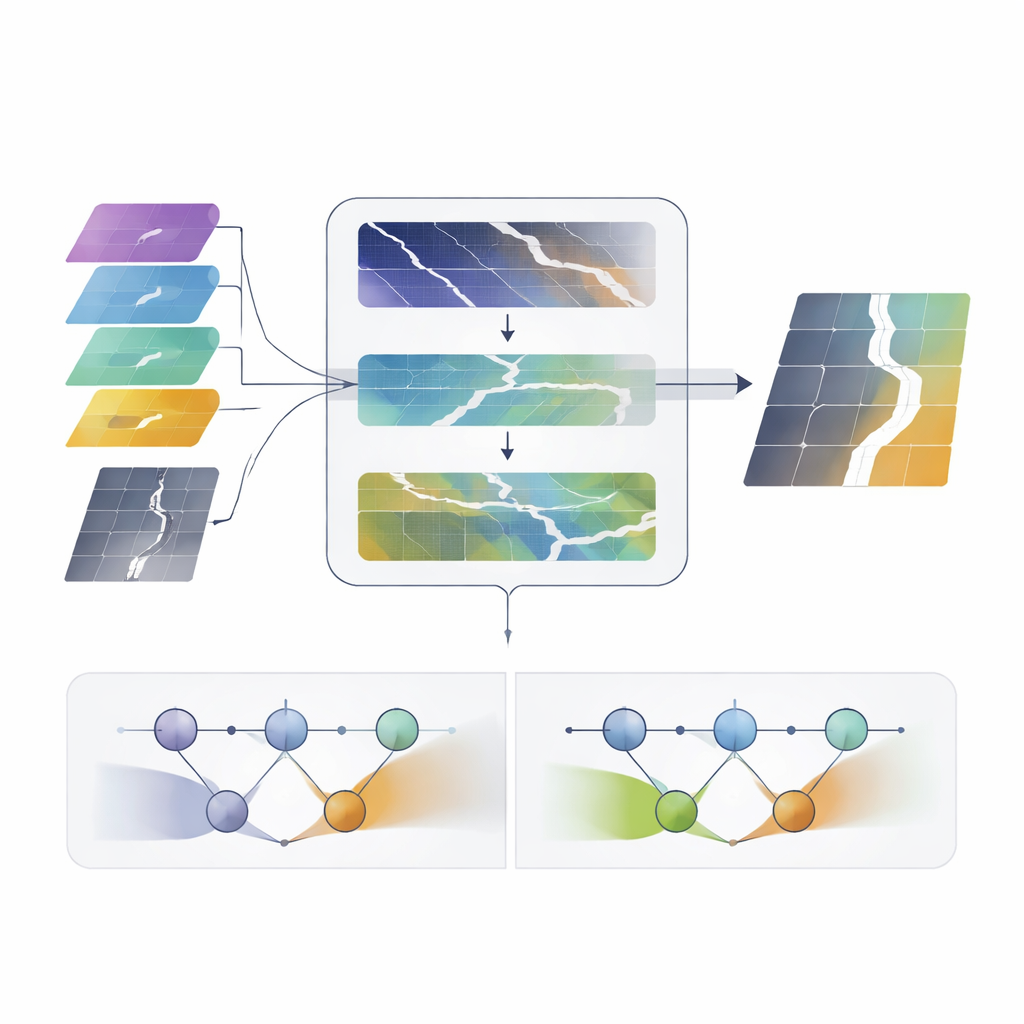
Il nuovo modulo di fusione funziona in due fasi che si completano a vicenda. Prima, una fase “discriminativa” si concentra su ciò che fa risaltare le strade rispetto all’intorno. Sostanzialmente sottrae i pattern di sfondo ampi e a basso dettaglio dalle mappe di feature, agendo come un filtro passa-alto che affila i contorni e le trame delle strade mentre sopprime il disordine come campi o tetti. Poi, una fase di “contesto globale” raccoglie informazioni dall’intera immagine in modo che segmenti stradali distanti possano essere trattati come parte di una singola rete. Combinando queste due prospettive, il modello preserva meglio le stradine a griglia nei paesi e mantiene anelli e curve continui nelle zone industriali.
Mantenere vivo il processo di apprendimento
Le reti profonde apprendono regolando molti “neuroni” interni, ma una comune funzione di attivazione, nota per semplicità e velocità, può far sì che alcuni neuroni smettano di aggiornarsi del tutto. Quando troppi si spengono, l’addestramento diventa instabile e le previsioni finali perdono dettagli fini. Per evitarlo, gli autori adottano una tecnica chiamata SUGAR, che mantiene la regola semplice per i calcoli in avanti ma usa un gradiente artificiale più morbido dietro le quinte quando il modello si aggiorna. Questo trucco mantiene il flusso del gradiente anche quando gli input sono deboli, così più neuroni restano attivi e possono contribuire ad apprendere pattern stradali sottili.
Dimostrare che funziona nel mondo reale
Per testare DS-Unet, il team ha utilizzato due collezioni note di immagini satellitari stradali provenienti da regioni e paesaggi diversi. Hanno suddiviso le grandi immagini in tessere gestibili, applicato variazioni realistiche di luminosità, colore e orientamento, e poi hanno addestrato il loro sistema insieme a 17 metodi di estrazione delle strade e segmentazione leader, comprendenti sia reti convoluzionali classiche sia progettazioni più recenti basate su transformer. Su tutte le misure chiave di accuratezza—quanto della vera area stradale viene catturata, quanto spesso si evitano false strade e quanto bene le mappe previste e quelle reali si sovrappongono—DS-Unet si è classificato costantemente al vertice, pur restando abbastanza veloce da risultare pratico per la mappatura su larga scala.
Cosa significa per mappe migliori
In termini semplici, questo lavoro dimostra che insegnare a una rete neurale sia a eliminare il disordine di sfondo sia a comprendere la disposizione più ampia di una scena può produrre mappe stradali più pulite e connesse dalle immagini satellitari. Abbinato a una regola di apprendimento più stabile che mantiene le unità interne del modello attivamente in miglioramento, DS-Unet traccia vicoli stretti dei paesi, evita di scambiare sentieri sterrati per vere strade e collega frammenti sparsi in reti coerenti meglio dei sistemi esistenti. Mentre agenzie cartografiche e aziende tecnologiche spingono verso mappe completamente automatizzate e aggiornate frequentemente, approcci come DS-Unet potrebbero svolgere un ruolo chiave nel trasformare immagini grezze in informazioni stradali accurate e utilizzabili per la vita quotidiana.
Citazione: Wang, J., Huang, Z., Ren, C. et al. Enhancing remote sensing road extraction via DS-Unet with complementary attention and surrogate gradients. Sci Rep 16, 9044 (2026). https://doi.org/10.1038/s41598-026-39811-x
Parole chiave: strade da telerilevamento, mappatura satellitare, segmentazione deep learning, reti basate su attenzione, analisi di immagini aeree